Sequence Model-week1编程题1(一步步实现RNN与LSTM)
一步步搭建循环神经网络
将在numpy中实现一个循环神经网络
Recurrent Neural Networks (RNN) are very effective for Natural Language Processing and other sequence tasks because they have "memory". 他们可以读取一个输入 \(x^{\langle t \rangle}\) (such as words) one at a time, 并且通过隐藏层激活 从一个 time-step 传递到下一个 time-step 来记住一些信息(information/context). 这允许单向RNN(uni-directional RNN)从过去获取信息来处理后面的输入,双向RNN(A bidirection RNN) 可以从过去和未来中获取上下文。
Notation:
上标(Superscript) \([l]\) 表示 \(l^{th}\) layer.
- Example: \(a^{[4]}\) is the \(4^{th}\) layer activation. \(W^{[5]}\) and \(b^{[5]}\) are the \(5^{th}\) layer parameters.
Superscript \((i)\) 表示 \(i^{th}\) example.
- Example: \(x^{(i)}\) is the \(i^{th}\) training example input.
Superscript \(\langle t \rangle\) 表示 \(t^{th}\) time-step.
- Example: \(x^{\langle t \rangle}\) 表示输入\(x\) 的 \(t^{th}\) time-step. \(x^{(i)\langle t \rangle}\) 表示输入\(x\) 的 第\(i\)个样本 的\(t^{th}\) timestep.
下标(Lowerscript) \(i\) 表示 \(i^{th}\) entry of a vector.
- Example: \(a^{[l]}_i\) 表示 \(l\) 层中的 \(i^{th}\) entry of the activations.
Example:
- \(a^{(2)[3]<4>}_5\) denotes the activation of the 2nd training example (2), 3rd layer [3], 4th time step <4>, and 5th entry in the vector.
import numpy as np
from rnn_utils import *
1. Forward propagation for the basic Recurrent Neural Network
实现一个基本的RNN结构,这里,\(T_x = T_y\).
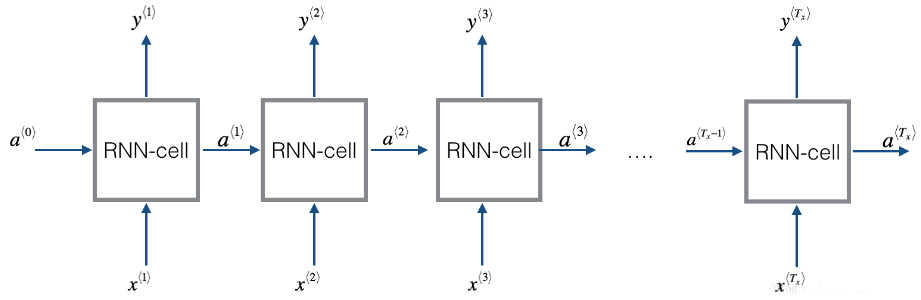
Figure 1: Basic RNN model
3D Tensor of shape \((n_{x},m,T_{x})\)
- The 3-dimensional tensor \(x\) of shape \((n_x,m,T_x)\) represents the input \(x\) that is fed into the RNN.
Taking a 2D slice for each time step: \(x^{\langle t \rangle}\)
- At each time step, we'll use a mini-batches of training examples (not just a single example).
- So, for each time step \(t\), we'll use a 2D slice of shape \((n_x,m)\).
- We're referring to this 2D slice as \(x^{\langle t \rangle}\). The variable name in the code is
xt.
Definition of hidden state \(a\)
- The activation \(a^{\langle t \rangle}\) that is passed to the RNN from one time step to another is called a "hidden state."
Dimensions of hidden state \(a\)
- Similar to the input tensor \(x\), the hidden state for a single training example is a vector of length \(n_{a}\).
- If we include a mini-batch of \(m\) training examples, the shape of a mini-batch is \((n_{a},m)\).
- When we include the time step dimension, the shape of the hidden state is \((n_{a}, m, T_x)\)
- We will loop through the time steps with index \(t\), and work with a 2D slice of the 3D tensor.
- We'll refer to this 2D slice as \(a^{\langle t \rangle}\).
- In the code, the variable names we use are either
a_prevora_next, depending on the function that's being implemented. - The shape of this 2D slice is \((n_{a}, m)\)
Dimensions of prediction \(\hat{y}\)
- Similar to the inputs and hidden states, \(\hat{y}\) is a 3D tensor of shape \((n_{y}, m, T_{y})\).
- \(n_{y}\): number of units in the vector representing the prediction.
- \(m\): number of examples in a mini-batch.
- \(T_{y}\): number of time steps in the prediction.
- For a single time step \(t\), a 2D slice \(\hat{y}^{\langle t \rangle}\) has shape \((n_{y}, m)\).
- In the code, the variable names are:
y_pred: \(\hat{y}\)yt_pred: \(\hat{y}^{\langle t \rangle}\)
实现RNN具体步骤:
Implement the calculations needed for one time-step of the RNN. (实现 RNN的一个时间步 所需要计算的东西)
Implement a loop over \(T_x\) time-steps in order to process all the inputs, one at a time. (在 \(T_x\) 时间步上实现一个循环,以便一次处理所有输入)
1.1 RNN cell
循环神经网络可以看作是单元的重复(repetition),首先要实现单个时间步的计算,下图描述了RNN单元的单个时间步的操作。
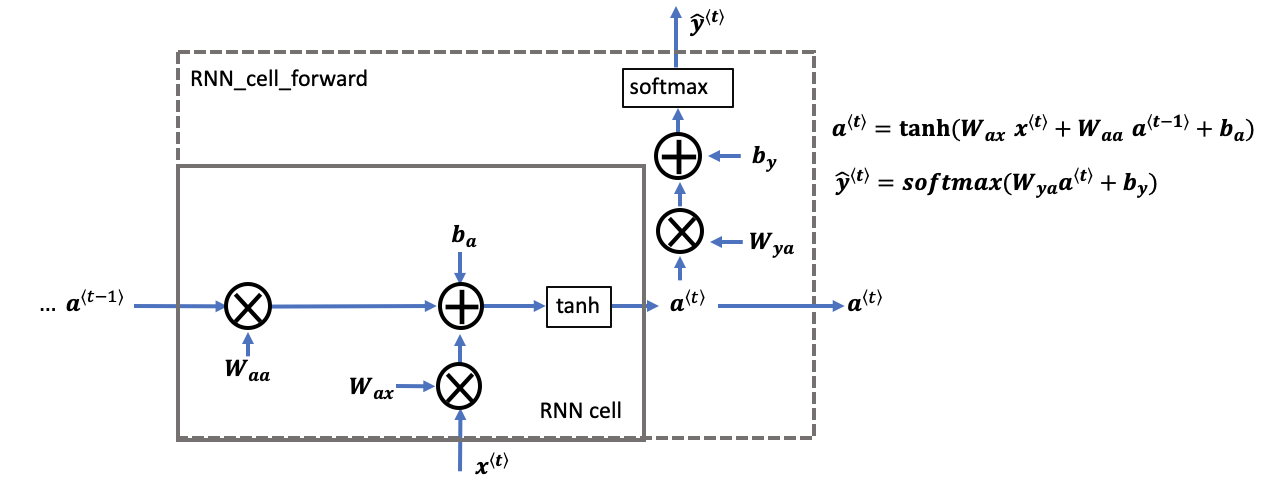
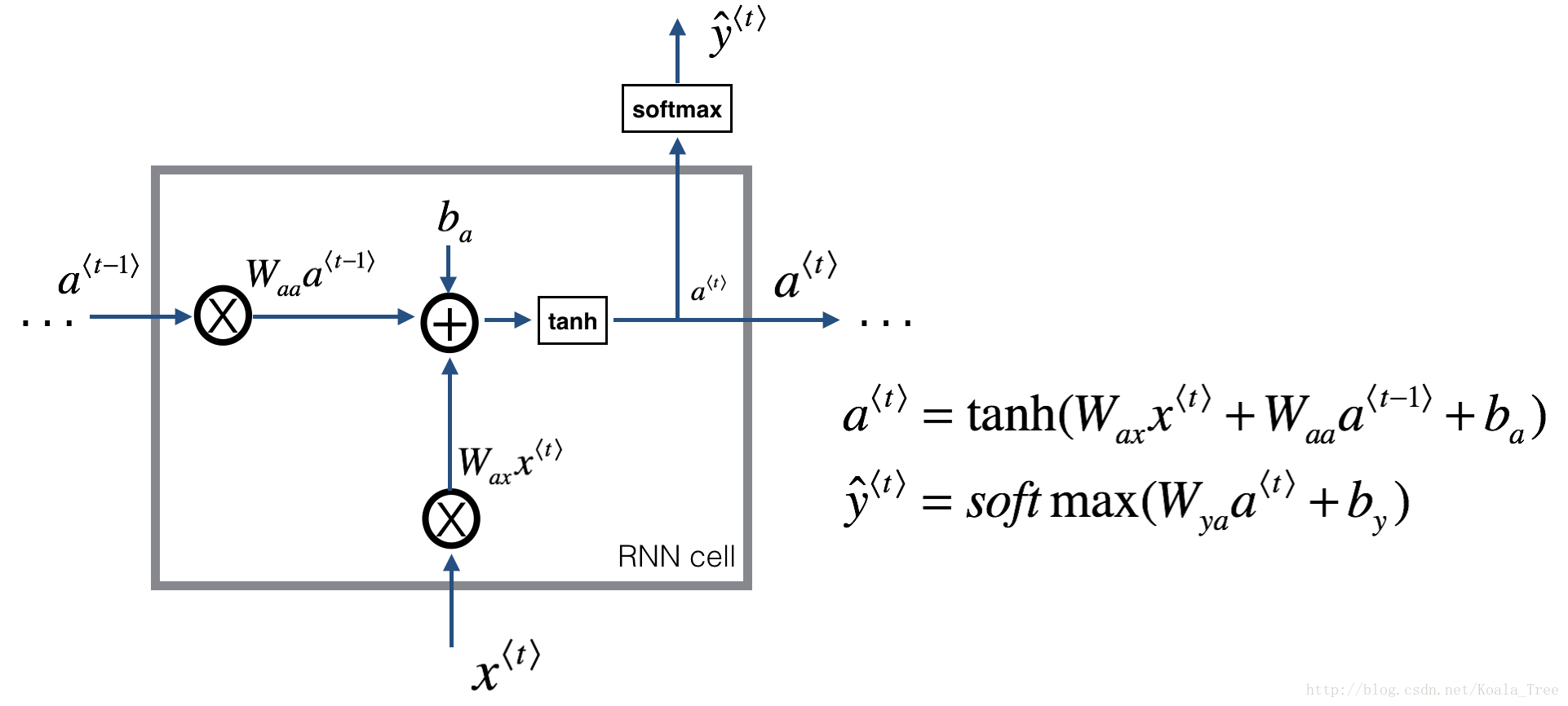
Figure 2: Basic RNN cell. Takes as input \(x^{\langle t \rangle}\) (current input) and \(a^{\langle t - 1\rangle}\) (previous hidden state containing information from the past), and outputs \(a^{\langle t \rangle}\) which is given to the next RNN cell and also used to predict \(y^{\langle t \rangle}\)
Instructions:
Compute the hidden state with tanh activation: \(a^{\langle t \rangle} = \tanh(W_{aa} a^{\langle t-1 \rangle} + W_{ax} x^{\langle t \rangle} + b_a)\).
Using your new hidden state \(a^{\langle t \rangle}\), compute the prediction \(\hat{y}^{\langle t \rangle} = softmax(W_{ya} a^{\langle t \rangle} + b_y)\). We provided you a function:
softmax.Store \((a^{\langle t \rangle}, a^{\langle t-1 \rangle}, x^{\langle t \rangle}, parameters)\) in cache
Return \(a^{\langle t \rangle}\) , \(y^{\langle t \rangle}\) and cache
We will vectorize over \(m\) examples. Thus, \(x^{\langle t \rangle}\) will have dimension \((n_x,m)\), and \(a^{\langle t \rangle}\) will have dimension \((n_a,m)\).
# GRADED FUNCTION: rnn_cell_forward
def rnn_cell_forward(xt, a_prev, parameters):
"""
Implements a single forward step of the RNN-cell as described in Figure (2)
Arguments:
xt -- your input data at timestep "t", numpy array of shape (n_x, m).
a_prev -- Hidden state at timestep "t-1", numpy array of shape (n_a, m)
parameters -- python dictionary containing:
Wax -- Weight matrix multiplying the input, numpy array of shape (n_a, n_x)
Waa -- Weight matrix multiplying the hidden state, numpy array of shape (n_a, n_a)
Wya -- Weight matrix relating the hidden-state to the output, numpy array of shape (n_y, n_a)
ba -- Bias, numpy array of shape (n_a, 1)
by -- Bias relating the hidden-state to the output, numpy array of shape (n_y, 1)
Returns:
a_next -- next hidden state, of shape (n_a, m)
yt_pred -- prediction at timestep "t", numpy array of shape (n_y, m)
cache -- tuple of values needed for the backward pass, contains (a_next, a_prev, xt, parameters)
"""
# Retrieve parameters from "parameters"
Wax = parameters["Wax"]
Waa = parameters["Waa"]
Wya = parameters["Wya"]
ba = parameters["ba"]
by = parameters["by"]
### START CODE HERE ### (≈2 lines)
# compute next activation state using the formula given above
a_next = np.tanh(np.dot(Waa, a_prev) + np.dot(Wax, xt) + ba)
# compute output of the current cell using the formula given above
yt_pred = softmax(np.dot(Wya, a_next) + by)
### END CODE HERE ###
# store values you need for backward propagation in cache
cache = (a_next, a_prev, xt, parameters)
return a_next, yt_pred, cache
测试:
np.random.seed(1)
xt = np.random.randn(3,10)
a_prev = np.random.randn(5,10)
Waa = np.random.randn(5,5)
Wax = np.random.randn(5,3)
Wya = np.random.randn(2,5)
ba = np.random.randn(5,1)
by = np.random.randn(2,1)
parameters = {"Waa": Waa, "Wax": Wax, "Wya": Wya, "ba": ba, "by": by}
a_next, yt_pred, cache = rnn_cell_forward(xt, a_prev, parameters)
print("a_next[4] = ", a_next[4])
print("a_next.shape = ", a_next.shape)
print("yt_pred[1] =", yt_pred[1])
print("yt_pred.shape = ", yt_pred.shape)
a_next[4] = [ 0.59584544 0.18141802 0.61311866 0.99808218 0.85016201 0.99980978
-0.18887155 0.99815551 0.6531151 0.82872037]
a_next.shape = (5, 10)
yt_pred[1] = [0.9888161 0.01682021 0.21140899 0.36817467 0.98988387 0.88945212
0.36920224 0.9966312 0.9982559 0.17746526]
yt_pred.shape = (2, 10)
1.2 RNN的前向传播
一个RNN是刚刚构建的 cell 的重复, 如果输入的数据序列经过10个时间步,那么将复制RNN单元10次,每个单元将前一个单元中的hidden state(\(a^{\langle t-1 \rangle}\)) 和当前时间步的输入数据(\(x^{\langle t \rangle}\)) 作为输入。它输出当前 time-step的 a hidden state (\(a^{\langle t \rangle}\)) and a prediction (\(y^{\langle t \rangle}\)).
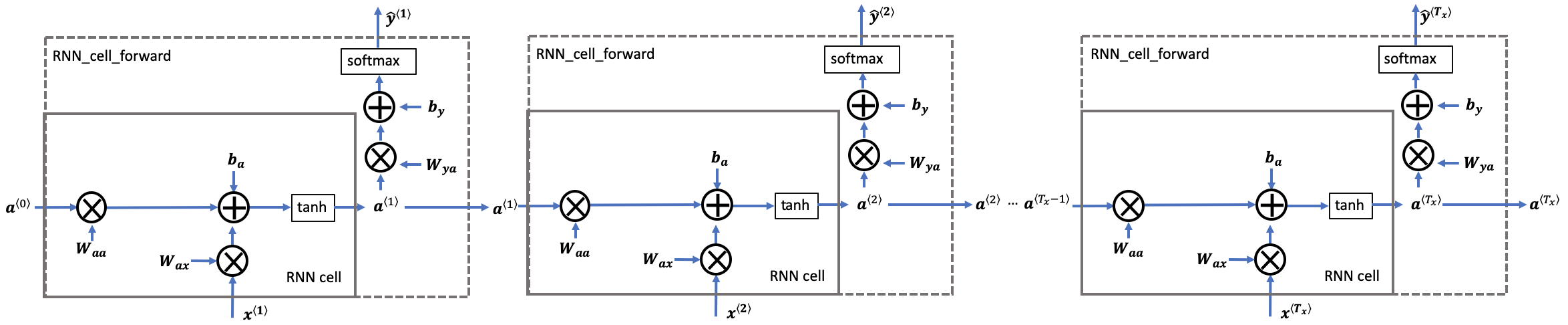
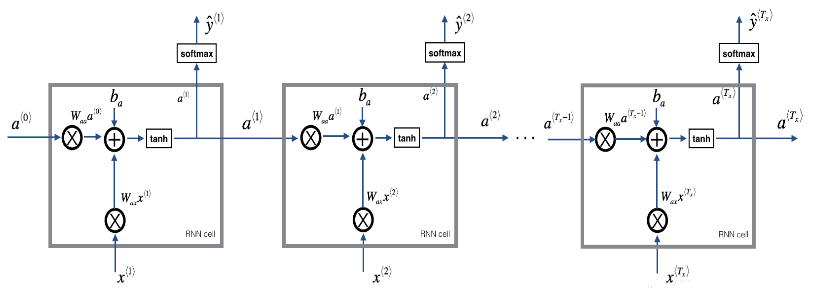
Figure 3: Basic RNN. The input sequence \(x = (x^{\langle 1 \rangle}, x^{\langle 2 \rangle}, ..., x^{\langle T_x \rangle})\) is carried over \(T_x\) time steps. The network outputs \(y = (y^{\langle 1 \rangle}, y^{\langle 2 \rangle}, ..., y^{\langle T_x \rangle})\).
Instructions:
创建 维度\((n_{a}, m, T_{x})\) 的零向量zeros (\(a\)) 将保存 由RNN计算的 所有 the hidden states
a.使用 \(a_0\) (initial hidden state) 初始化 the "next" hidden state .
开始循环所有的 time-step, your incremental index is \(t\) :
使用
rnn_cell_forward函数 更新 "next" hidden state and the cache.使用 \(a\) 来保存 "next" hidden state (\(t^{th}\) position).
使用 \(y\) 来保存预测值(prediction).
把
cache保存到caches列表中.
返回 \(a\), \(y\) and caches
Hints:
- Create a 3D array of zeros, \(a\) of shape \((n_{a}, m, T_{x})\) that will store all the hidden states computed by the RNN.
- Create a 3D array of zeros, \(\hat{y}\), of shape \((n_{y}, m, T_{x})\) that will store the predictions.
- Note that in this case, \(T_{y} = T_{x}\) (the prediction and input have the same number of time steps).
- Initialize the 2D hidden state
a_nextby setting it equal to the initial hidden state, \(a_{0}\). - At each time step \(t\):
- Get \(x^{\langle t \rangle}\), which is a 2D slice of \(x\) for a single time step \(t\).
- \(x^{\langle t \rangle}\) has shape \((n_{x}, m)\)
- \(x\) has shape \((n_{x}, m, T_{x})\)
- Update the 2D hidden state \(a^{\langle t \rangle}\) (variable name
a_next), the prediction \(\hat{y}^{\langle t \rangle}\) and the cache by runningrnn_cell_forward.- \(a^{\langle t \rangle}\) has shape \((n_{a}, m)\)
- Store the 2D hidden state in the 3D tensor \(a\), at the \(t^{th}\) position.
- \(a\) has shape \((n_{a}, m, T_{x})\)
- Store the 2D \(\hat{y}^{\langle t \rangle}\) prediction (variable name
yt_pred) in the 3D tensor \(\hat{y}_{pred}\) at the \(t^{th}\) position.- \(\hat{y}^{\langle t \rangle}\) has shape \((n_{y}, m)\)
- \(\hat{y}\) has shape \((n_{y}, m, T_x)\)
- Append the cache to the list of caches.
- Get \(x^{\langle t \rangle}\), which is a 2D slice of \(x\) for a single time step \(t\).
- Return the 3D tensor \(a\) and \(\hat{y}\), as well as the list of caches.
# GRADED FUNCTION: rnn_forward
def rnn_forward(x, a0, parameters):
"""
Implement the forward propagation of the recurrent neural network described in Figure (3).
Arguments:
x -- Input data for every time-step, of shape (n_x, m, T_x).
a0 -- Initial hidden state, of shape (n_a, m)
parameters -- python dictionary containing:
Waa -- Weight matrix multiplying the hidden state, numpy array of shape (n_a, n_a)
Wax -- Weight matrix multiplying the input, numpy array of shape (n_a, n_x)
Wya -- Weight matrix relating the hidden-state to the output, numpy array of shape (n_y, n_a)
ba -- Bias numpy array of shape (n_a, 1)
by -- Bias relating the hidden-state to the output, numpy array of shape (n_y, 1)
Returns:
a -- Hidden states for every time-step, numpy array of shape (n_a, m, T_x)
y_pred -- Predictions for every time-step, numpy array of shape (n_y, m, T_x)
caches -- tuple of values needed for the backward pass, contains (list of caches, x)
"""
# Initialize "caches" which will contain the list of all caches
caches = []
# Retrieve dimensions from shapes of x and parameters["Wya"]
n_x, m, T_x = x.shape
n_y, n_a = parameters["Wya"].shape
### START CODE HERE ###
# initialize "a" and "y" with zeros (≈2 lines)
a = np.zeros((n_a, m, T_x))
y_pred = np.zeros((n_y, m, T_x))
# Initialize a_next (≈1 line)
a_next = a0
# loop over all time-steps
for t in range(T_x):
# Update next hidden state, compute the prediction, get the cache (≈1 line)
a_next, yt_pred, cache = rnn_cell_forward(x[:,:,t], a_next, parameters)
# Save the value of the new "next" hidden state in a (≈1 line)
a[:,:,t] = a_next
# Save the value of the prediction in y (≈1 line)
y_pred[:,:,t] = yt_pred
# Append "cache" to "caches" (≈1 line)
caches.append(cache)
### END CODE HERE ###
# store values needed for backward propagation in cache
caches = (caches, x)
return a, y_pred, caches
测试:
np.random.seed(1)
x = np.random.randn(3,10,4)
a0 = np.random.randn(5,10)
Waa = np.random.randn(5,5)
Wax = np.random.randn(5,3)
Wya = np.random.randn(2,5)
ba = np.random.randn(5,1)
by = np.random.randn(2,1)
parameters = {"Waa": Waa, "Wax": Wax, "Wya": Wya, "ba": ba, "by": by}
a, y_pred, caches = rnn_forward(x, a0, parameters)
print("a[4][1] = ", a[4][1])
print("a.shape = ", a.shape)
print("y_pred[1][3] =", y_pred[1][3])
print("y_pred.shape = ", y_pred.shape)
print("caches[1][1][3] =", caches[1][1][3])
print("len(caches) = ", len(caches))
a[4][1] = [-0.99999375 0.77911235 -0.99861469 -0.99833267]
a.shape = (5, 10, 4)
y_pred[1][3] = [0.79560373 0.86224861 0.11118257 0.81515947]
y_pred.shape = (2, 10, 4)
caches[1][1][3] = [-1.1425182 -0.34934272 -0.20889423 0.58662319]
len(caches) = 2
我们构建了循环神经网络的前向传播函数,这对于某些应用程序来说已经足够好了,但是它还存在梯度消失(vanishing gradient )的问题。当每个输出 \(y^{\langle t \rangle}\) 是根据 局部上下文("local" context) 来预测时,效果较好。(意思是输入 \(x^{\langle t' \rangle}\) ,其中 \(t'\) 与 \(t\) 相隔不太远).
接下来要构建一个更加复杂的 LSTM模型,它可以更好地解决梯度消失的问题,LSTM能够更好地记住一条信息,并且可以在很多time-steps中保存。
2. Long Short-Term Memory (LSTM) network
下图是LSTM模块:
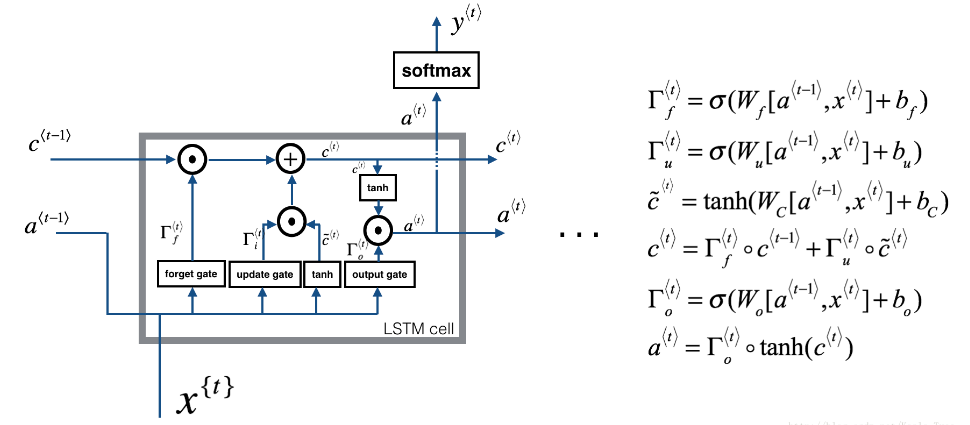
Figure 4: LSTM-cell. 它跟踪和更新每个time-step上的 单元状态(cell state) 或 记忆变量(memory variable) \(c^{\langle t \rangle}\), 这跟 \(a^{\langle t \rangle}\) 不同.
先来实现一个LSTM单元,只执行一个时间步,然后在循环中调用,以处理所有输入数据。
About the gates
- Forget gate
假设,我们正在阅读文本中的单词,并希望使用LSTM来跟踪语法结构,比如,主语是单数(singular)还是复数(plural)。如果主语从单数变为复数,我们需要找到一种方法来 摆脱 我们先前存储的单复数状态的记忆值。在LSTM中,遗忘门是这样做的:
\]
其中, \(W_f\) 是控制遗忘门的权值,我们 concatenate \([a^{\langle t-1 \rangle}, x^{\langle t \rangle}]\) and multiply by \(W_f\),结果是得到了一个 vector \(\Gamma_f^{\langle t \rangle}\),其值在0 与 1 之间。这个 forget gate vector 将与 前一个单元状态(cell state) \(c^{\langle t-1 \rangle}\) 元素相乘。
因此,如果 \(\Gamma_f^{\langle t \rangle}\) 的一个值是 0 (或 \(\approx\) 0) ,则意味着 LSTM 应该删除这条信息 ( the singular subject) 在相应的\(c^{\langle t-1 \rangle}\)组成部分中。如果其中有值为 1,那么 LSTM 将保留信息。
- Update gate
一旦我们忘记过去所讨论的主语是单数,我们需要找到一种方法来更新它,以反映新的主语现在是复数。这里是更新门(update gate)的公式
\]
与遗忘门相似,\(\Gamma_u^{\langle t \rangle}\) 向量的值在0与 1之间。为了计算 \(c^{\langle t \rangle}\),它会与 \(\tilde{c}^{\langle t \rangle}\) 元素相乘。
- Updating the cell
为了更新主语,我们需要创建一个新的向量,我们可以将其添加到之前的单元状态中(cell state)。公式为:
\]
最后,新的单元状态(cell state)是:
\]
- Output gate
为了决定我们将使用哪种输出,使用下列公式:
\]
\]
2.1 LSTM cell
Instructions:
把 \(a^{\langle t-1 \rangle}\) 和 \(x^{\langle t \rangle}\) 连接起来变成一个矩阵: \(concat = \begin{bmatrix} a^{\langle t-1 \rangle} \\ x^{\langle t \rangle} \end{bmatrix}\).
计算公式 1-6,你可以使用
sigmoid()(provided) 和np.tanh().计算 prediction \(y^{\langle t \rangle}\). 你可以使用
softmax()(provided).
# GRADED FUNCTION: lstm_cell_forward
def lstm_cell_forward(xt, a_prev, c_prev, parameters):
"""
Implement a single forward step of the LSTM-cell as described in Figure (4)
Arguments:
xt -- your input data at timestep "t", numpy array of shape (n_x, m).
a_prev -- Hidden state at timestep "t-1", numpy array of shape (n_a, m)
c_prev -- Memory state at timestep "t-1", numpy array of shape (n_a, m)
parameters -- python dictionary containing:
Wf -- Weight matrix of the forget gate, numpy array of shape (n_a, n_a + n_x)
bf -- Bias of the forget gate, numpy array of shape (n_a, 1)
Wi -- Weight matrix of the update gate, numpy array of shape (n_a, n_a + n_x)
bi -- Bias of the update gate, numpy array of shape (n_a, 1)
Wc -- Weight matrix of the first "tanh", numpy array of shape (n_a, n_a + n_x)
bc -- Bias of the first "tanh", numpy array of shape (n_a, 1)
Wo -- Weight matrix of the output gate, numpy array of shape (n_a, n_a + n_x)
bo -- Bias of the output gate, numpy array of shape (n_a, 1)
Wy -- Weight matrix relating the hidden-state to the output, numpy array of shape (n_y, n_a)
by -- Bias relating the hidden-state to the output, numpy array of shape (n_y, 1)
Returns:
a_next -- next hidden state, of shape (n_a, m)
c_next -- next memory state, of shape (n_a, m)
yt_pred -- prediction at timestep "t", numpy array of shape (n_y, m)
cache -- tuple of values needed for the backward pass, contains (a_next, c_next, a_prev, c_prev, xt, parameters)
Note: ft/it/ot stand for the forget/update/output gates, cct stands for the candidate value (c tilde),
c stands for the memory value
"""
# Retrieve parameters from "parameters"
Wf = parameters["Wf"]
bf = parameters["bf"]
Wi = parameters["Wi"]
bi = parameters["bi"]
Wc = parameters["Wc"]
bc = parameters["bc"]
Wo = parameters["Wo"]
bo = parameters["bo"]
Wy = parameters["Wy"]
by = parameters["by"]
# Retrieve dimensions from shapes of xt and Wy
n_x, m = xt.shape
n_y, n_a = Wy.shape
### START CODE HERE ###
# Concatenate a_prev and xt (≈3 lines)
concat = np.zeros((n_a+n_x, m))
concat[: n_a, :] = a_prev
concat[n_a :, :] = xt
# Compute values for ft, it, cct, c_next, ot, a_next using the formulas given figure (4) (≈6 lines)
ft = sigmoid(np.dot(Wf, concat) + bf)
it = sigmoid(np.dot(Wi, concat) + bi)
cct = np.tanh(np.dot(Wc, concat) + bc)
c_next = ft * c_prev + it * cct
ot = sigmoid(np.dot(Wo, concat) + bo)
a_next = ot * np.tanh(c_next)
c_next = ft * c_prev + it * cct
ot = sigmoid(np.dot(Wo,concat)+bo)
a_next = ot * np.tanh(c_next)
# Compute prediction of the LSTM cell (≈1 line)
yt_pred = softmax(np.dot(Wy, a_next) + by)
### END CODE HERE ###
# store values needed for backward propagation in cache
cache = (a_next, c_next, a_prev, c_prev, ft, it, cct, ot, xt, parameters)
return a_next, c_next, yt_pred, cache
测试
np.random.seed(1)
xt = np.random.randn(3,10)
a_prev = np.random.randn(5,10)
c_prev = np.random.randn(5,10)
Wf = np.random.randn(5, 5+3)
bf = np.random.randn(5,1)
Wi = np.random.randn(5, 5+3)
bi = np.random.randn(5,1)
Wo = np.random.randn(5, 5+3)
bo = np.random.randn(5,1)
Wc = np.random.randn(5, 5+3)
bc = np.random.randn(5,1)
Wy = np.random.randn(2,5)
by = np.random.randn(2,1)
parameters = {"Wf": Wf, "Wi": Wi, "Wo": Wo, "Wc": Wc, "Wy": Wy, "bf": bf, "bi": bi, "bo": bo, "bc": bc, "by": by}
a_next, c_next, yt, cache = lstm_cell_forward(xt, a_prev, c_prev, parameters)
print("a_next[4] = ", a_next[4])
print("a_next.shape = ", c_next.shape)
print("c_next[2] = ", c_next[2])
print("c_next.shape = ", c_next.shape)
print("yt[1] =", yt[1])
print("yt.shape = ", yt.shape)
print("cache[1][3] =", cache[1][3])
print("len(cache) = ", len(cache))
a_next[4] = [-0.66408471 0.0036921 0.02088357 0.22834167 -0.85575339 0.00138482
0.76566531 0.34631421 -0.00215674 0.43827275]
a_next.shape = (5, 10)
c_next[2] = [ 0.63267805 1.00570849 0.35504474 0.20690913 -1.64566718 0.11832942
0.76449811 -0.0981561 -0.74348425 -0.26810932]
c_next.shape = (5, 10)
yt[1] = [0.79913913 0.15986619 0.22412122 0.15606108 0.97057211 0.31146381
0.00943007 0.12666353 0.39380172 0.07828381]
yt.shape = (2, 10)
cache[1][3] = [-0.16263996 1.03729328 0.72938082 -0.54101719 0.02752074 -0.30821874
0.07651101 -1.03752894 1.41219977 -0.37647422]
len(cache) = 10
2.2 Forward pass for LSTM
我们已经实现了LSTM单元的一个时间步的前向传播,现在我们要对LSTM网络进行前向传播进行计算
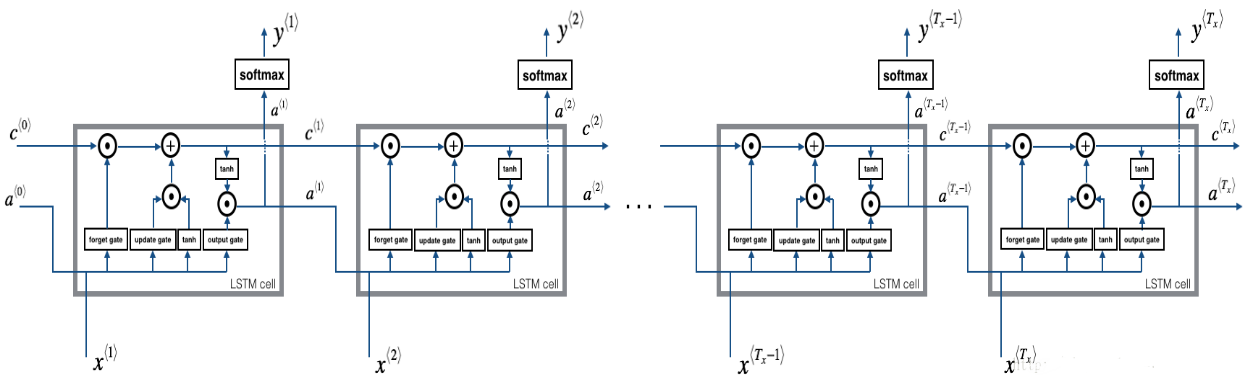
Figure 4: LSTM over multiple time-steps.
Exercise: Implement lstm_forward() to run an LSTM over \(T_x\) time-steps.
Note: \(c^{\langle 0 \rangle}\) is initialized with zeros.
# GRADED FUNCTION: lstm_forward
def lstm_forward(x, a0, parameters):
"""
Implement the forward propagation of the recurrent neural network using an LSTM-cell described in Figure (3).
Arguments:
x -- Input data for every time-step, of shape (n_x, m, T_x).
a0 -- Initial hidden state, of shape (n_a, m)
parameters -- python dictionary containing:
Wf -- Weight matrix of the forget gate, numpy array of shape (n_a, n_a + n_x)
bf -- Bias of the forget gate, numpy array of shape (n_a, 1)
Wi -- Weight matrix of the update gate, numpy array of shape (n_a, n_a + n_x)
bi -- Bias of the update gate, numpy array of shape (n_a, 1)
Wc -- Weight matrix of the first "tanh", numpy array of shape (n_a, n_a + n_x)
bc -- Bias of the first "tanh", numpy array of shape (n_a, 1)
Wo -- Weight matrix of the output gate, numpy array of shape (n_a, n_a + n_x)
bo -- Bias of the output gate, numpy array of shape (n_a, 1)
Wy -- Weight matrix relating the hidden-state to the output, numpy array of shape (n_y, n_a)
by -- Bias relating the hidden-state to the output, numpy array of shape (n_y, 1)
Returns:
a -- Hidden states for every time-step, numpy array of shape (n_a, m, T_x)
y -- Predictions for every time-step, numpy array of shape (n_y, m, T_x)
caches -- tuple of values needed for the backward pass, contains (list of all the caches, x)
"""
# Initialize "caches", which will track the list of all the caches
caches = []
### START CODE HERE ###
# Retrieve dimensions from shapes of x and parameters['Wy'] (≈2 lines)
n_x, m, T_x = x.shape
n_y, n_a = parameters['Wy'].shape
# initialize "a", "c" and "y" with zeros (≈3 lines)
a = np.zeros((n_a, m, T_x))
c = np.zeros((n_a, m, T_x))
y = np.zeros((n_y, m, T_x))
# Initialize a_next and c_next (≈2 lines)
a_next = a0
c_next = np.zeros((n_a, 1))
# loop over all time-steps
for t in range(T_x):
# Update next hidden state, next memory state, compute the prediction, get the cache (≈1 line)
# a_next, c_next, yt_pred, cache
a_next, c_next, yt, cache = lstm_cell_forward(x[:,:,t], a_next, c_next, parameters)
# Save the value of the new "next" hidden state in a (≈1 line)
a[:,:,t] = a_next
# Save the value of the prediction in y (≈1 line)
y[:,:,t] = yt
# Save the value of the next cell state (≈1 line)
c[:,:,t] = c_next
# Append the cache into caches (≈1 line)
caches.append(cache)
### END CODE HERE ###
# store values needed for backward propagation in cache
caches = (caches, x)
return a, y, c, caches
测试:
np.random.seed(1)
x = np.random.randn(3,10,7)
a0 = np.random.randn(5,10)
Wf = np.random.randn(5, 5+3)
bf = np.random.randn(5,1)
Wi = np.random.randn(5, 5+3)
bi = np.random.randn(5,1)
Wo = np.random.randn(5, 5+3)
bo = np.random.randn(5,1)
Wc = np.random.randn(5, 5+3)
bc = np.random.randn(5,1)
Wy = np.random.randn(2,5)
by = np.random.randn(2,1)
parameters = {"Wf": Wf, "Wi": Wi, "Wo": Wo, "Wc": Wc, "Wy": Wy, "bf": bf, "bi": bi, "bo": bo, "bc": bc, "by": by}
a, y, c, caches = lstm_forward(x, a0, parameters)
print("a[4][3][6] = ", a[4][3][6])
print("a.shape = ", a.shape)
print("y[1][4][3] =", y[1][4][3])
print("y.shape = ", y.shape)
print("caches[1][1[1]] =", caches[1][1][1])
print("c[1][2][1]", c[1][2][1])
print("len(caches) = ", len(caches))
a[4][3][6] = 0.17211776753291672
a.shape = (5, 10, 7)
y[1][4][3] = 0.9508734618501101
y.shape = (2, 10, 7)
caches[1][1[1]] = [ 0.82797464 0.23009474 0.76201118 -0.22232814 -0.20075807 0.18656139
0.41005165]
c[1][2][1] -0.8555449167181981
len(caches) = 2
3. Backpropagation in recurrent neural networks
在循环神经网络中,我们可以计算与成本相关的导数,以便更新参数。
3.1 基本的RNN网络的反向传播
We will start by computing the backward pass for the basic RNN-cell.
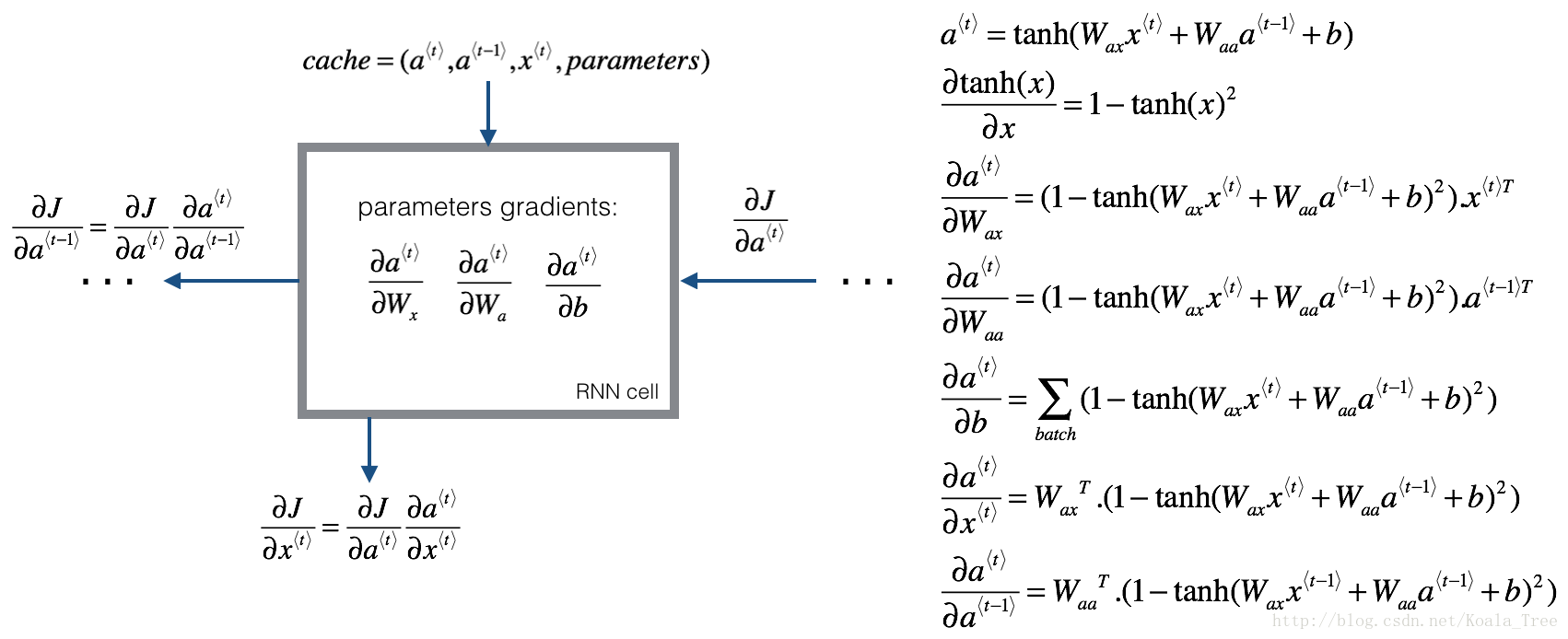
Figure 5: RNN-cell's backward pass. 就像在fully-connected neural network, the cost function \(J\) 的导数通过遵循链式法则从RNN进行反向传播。 链式法则也用于计算 \((\frac{\partial J}{\partial W_{ax}},\frac{\partial J}{\partial W_{aa}},\frac{\partial J}{\partial b})\) 来更新 parameters \((W_{ax}, W_{aa}, b_a)\).
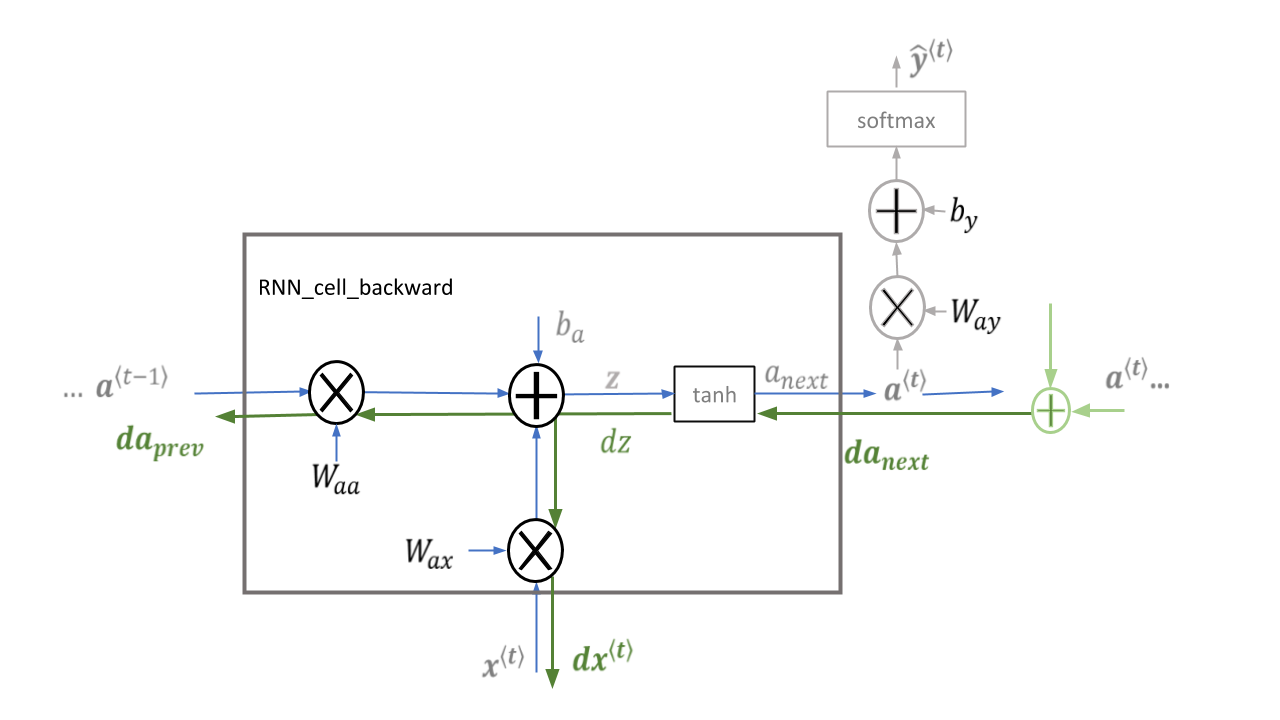
Figure 7: This implementation of rnn_cell_backward does not include the output dense layer and softmax which are included in rnn_cell_forward.
\(da_{next}\) is \(\frac{\partial{J}}{\partial a^{\langle t \rangle}}\) and includes loss from previous stages and current stage output logic. The addition shown in green will be part of your implementation of rnn_backward.
Deriving the one step backward functions:
单步反向传播的推导:为了计算rnn_cell_backward,我们需要计算下面的公式:
\(\tanh\) 的导数是 \(1-\tanh(x)^2\). 证明. 注意: \(\text{sech}(x)^2 = 1 - \tanh(x)^2\)
相似于,对于 \(\frac{ \partial a^{\langle t \rangle} } {\partial W_{ax}}, \frac{ \partial a^{\langle t \rangle} } {\partial W_{aa}}, \frac{ \partial a^{\langle t \rangle} } {\partial b}\), \(\tanh(u)\) 的导数是 \((1-\tanh(u)^2)du\).
dtanh = da_next * (1 - np.square(np.tanh(np.dot(Wax, xt) + np.dot(Waa, a_prev) + ba)))
Equations
To compute the rnn_cell_backward you can utilize the following equations. It is a good exercise to derive them by hand. Here, \(*\) denotes element-wise multiplication while the absence of a symbol indicates matrix multiplication.
\displaystyle a^{\langle t \rangle} &= \tanh(W_{ax} x^{\langle t \rangle} + W_{aa} a^{\langle t-1 \rangle} + b_{a})\tag{-} \\[8pt]
\displaystyle \frac{\partial \tanh(x)} {\partial x} &= 1 - \tanh^2(x) \tag{-} \\[8pt]
\displaystyle {dW_{ax}} &= (da_{next} * ( 1-\tanh^2(W_{ax}x^{\langle t \rangle}+W_{aa} a^{\langle t-1 \rangle} + b_{a}) )) x^{\langle t \rangle T}\tag{1} \\[8pt]
\displaystyle dW_{aa} &= (da_{next} * ( 1-\tanh^2(W_{ax}x^{\langle t \rangle}+W_{aa} a^{\langle t-1 \rangle} + b_{a}) )) a^{\langle t-1 \rangle T}\tag{2} \\[8pt]
\displaystyle db_a& = \sum_{batch}( da_{next} * ( 1-\tanh^2(W_{ax}x^{\langle t \rangle}+W_{aa} a^{\langle t-1 \rangle} + b_{a}) ))\tag{3} \\[8pt]
\displaystyle dx^{\langle t \rangle} &= { W_{ax}}^T (da_{next} * ( 1-\tanh^2(W_{ax}x^{\langle t \rangle}+W_{aa} a^{\langle t-1 \rangle} + b_{a}) ))\tag{4} \\[8pt]
\displaystyle da_{prev} &= { W_{aa}}^T(da_{next} * ( 1-\tanh^2(W_{ax}x^{\langle t \rangle}+W_{aa} a^{\langle t-1 \rangle} + b_{a}) ))\tag{5}
\end{align}
\]
def rnn_cell_backward(da_next, cache):
"""
Implements the backward pass for the RNN-cell (single time-step).
Arguments:
da_next -- Gradient of loss with respect to next hidden state
cache -- python dictionary containing useful values (output of rnn_cell_forward())
Returns:
gradients -- python dictionary containing:
dx -- Gradients of input data, of shape (n_x, m)
da_prev -- Gradients of previous hidden state, of shape (n_a, m)
dWax -- Gradients of input-to-hidden weights, of shape (n_a, n_x)
dWaa -- Gradients of hidden-to-hidden weights, of shape (n_a, n_a)
dba -- Gradients of bias vector, of shape (n_a, 1)
"""
# Retrieve values from cache
(a_next, a_prev, xt, parameters) = cache
# Retrieve values from parameters
Wax = parameters["Wax"]
Waa = parameters["Waa"]
Wya = parameters["Wya"]
ba = parameters["ba"]
by = parameters["by"]
### START CODE HERE ###
# compute the gradient of tanh with respect to a_next (≈1 line)
dtanh = da_next * (1 - np.square(np.tanh(np.dot(Wax, xt) + np.dot(Waa, a_prev) + ba)))
# compute the gradient of the loss with respect to Wax (≈2 lines)
dxt = np.dot(Wax.T, dtanh)
dWax = np.dot(dtanh, xt.T)
# compute the gradient with respect to Waa (≈2 lines)
da_prev = np.dot(Waa.T, dtanh)
dWaa = np.dot(dtanh, a_prev.T)
# compute the gradient with respect to b (≈1 line)
dba = np.sum(dtanh, axis = 1, keepdims = True)
### END CODE HERE ###
# Store the gradients in a python dictionary
gradients = {"dxt": dxt, "da_prev": da_prev, "dWax": dWax, "dWaa": dWaa, "dba": dba}
return gradients
测试:
np.random.seed(1)
xt = np.random.randn(3,10)
a_prev = np.random.randn(5,10)
Wax = np.random.randn(5,3)
Waa = np.random.randn(5,5)
Wya = np.random.randn(2,5)
b = np.random.randn(5,1)
by = np.random.randn(2,1)
parameters = {"Wax": Wax, "Waa": Waa, "Wya": Wya, "ba": ba, "by": by}
a_next, yt, cache = rnn_cell_forward(xt, a_prev, parameters)
da_next = np.random.randn(5,10)
gradients = rnn_cell_backward(da_next, cache)
print("gradients[\"dxt\"][1][2] =", gradients["dxt"][1][2])
print("gradients[\"dxt\"].shape =", gradients["dxt"].shape)
print("gradients[\"da_prev\"][2][3] =", gradients["da_prev"][2][3])
print("gradients[\"da_prev\"].shape =", gradients["da_prev"].shape)
print("gradients[\"dWax\"][3][1] =", gradients["dWax"][3][1])
print("gradients[\"dWax\"].shape =", gradients["dWax"].shape)
print("gradients[\"dWaa\"][1][2] =", gradients["dWaa"][1][2])
print("gradients[\"dWaa\"].shape =", gradients["dWaa"].shape)
print("gradients[\"dba\"][4] =", gradients["dba"][4])
print("gradients[\"dba\"].shape =", gradients["dba"].shape)
gradients["dxt"][1][2] = -0.4605641030588796
gradients["dxt"].shape = (3, 10)
gradients["da_prev"][2][3] = 0.08429686538067718
gradients["da_prev"].shape = (5, 10)
gradients["dWax"][3][1] = 0.3930818739219304
gradients["dWax"].shape = (5, 3)
gradients["dWaa"][1][2] = -0.2848395578696067
gradients["dWaa"].shape = (5, 5)
gradients["dba"][4] = [0.80517166]
gradients["dba"].shape = (5, 1)
Backward pass through the RNN
计算 每个time-step关于 \(a^{\langle t \rangle}\) 代价的梯度 是有用的,因为它帮助梯度 向前一个 RNN-cell 反向传播。从结尾开始,迭代所有time steps,每一步,实现 \(db_a\), \(dW_{aa}\), \(dW_{ax}\), 并且存储 \(dx\).
Instructions:
实现 rnn_backward函数. 首先,初始化 回归变量为0,然后,循环每个time-steps,通过调用 rnn_cell_backward,更新其他变量.
def rnn_backward(da, caches):
"""
Implement the backward pass for a RNN over an entire sequence of input data.
Arguments:
da -- Upstream gradients of all hidden states, of shape (n_a, m, T_x)
caches -- tuple containing information from the forward pass (rnn_forward)
Returns:
gradients -- python dictionary containing:
dx -- Gradient w.r.t. the input data, numpy-array of shape (n_x, m, T_x)
da0 -- Gradient w.r.t the initial hidden state, numpy-array of shape (n_a, m)
dWax -- Gradient w.r.t the input's weight matrix, numpy-array of shape (n_a, n_x)
dWaa -- Gradient w.r.t the hidden state's weight matrix, numpy-arrayof shape (n_a, n_a)
dba -- Gradient w.r.t the bias, of shape (n_a, 1)
"""
### START CODE HERE ###
# Retrieve values from the first cache (t=1) of caches (≈2 lines)
(caches, x) = caches
(a1, a0, x1, parameters) = caches[0]
# Retrieve dimensions from da's and x1's shapes (≈2 lines)
n_a, m, T_x = da.shape
n_x, m = x1.shape
# initialize the gradients with the right sizes (≈6 lines)
dx = np.zeros((n_x, m, T_x))
dWax = np.zeros((n_a, n_x))
dWaa = np.zeros((n_a, n_a))
dba = np.zeros((n_a, 1))
da0 = np.zeros((n_a, m))
da_prevt = np.zeros((n_a, 1))
# Loop through all the time steps
for t in reversed(range(T_x)):
# Compute gradients at time step t. Choose wisely the "da_next" and the "cache" to use in the backward propagation step. (≈1 line)
gradients = rnn_cell_backward(da[:,:,t] + da_prevt, caches[t])
# Retrieve derivatives from gradients (≈ 1 line)
dxt, da_prevt, dWaxt, dWaat, dbat = gradients['dxt'], gradients['da_prev'], gradients['dWax'], gradients['dWaa'], gradients['dba']
# Increment global derivatives w.r.t parameters by adding their derivative at time-step t (≈4 lines)
dx[:, :, t] = dxt
dWax += dWaxt
dWaa += dWaat
dba += dbat
# Set da0 to the gradient of a which has been backpropagated through all time-steps (≈1 line)
da0 = da_prevt
### END CODE HERE ###
# Store the gradients in a python dictionary
gradients = {"dx": dx, "da0": da0, "dWax": dWax, "dWaa": dWaa,"dba": dba}
return gradients
测试:
np.random.seed(1)
x = np.random.randn(3,10,4)
a0 = np.random.randn(5,10)
Wax = np.random.randn(5,3)
Waa = np.random.randn(5,5)
Wya = np.random.randn(2,5)
ba = np.random.randn(5,1)
by = np.random.randn(2,1)
parameters = {"Wax": Wax, "Waa": Waa, "Wya": Wya, "ba": ba, "by": by}
a, y, caches = rnn_forward(x, a0, parameters)
da = np.random.randn(5, 10, 4)
gradients = rnn_backward(da, caches)
print("gradients[\"dx\"][1][2] =", gradients["dx"][1][2])
print("gradients[\"dx\"].shape =", gradients["dx"].shape)
print("gradients[\"da0\"][2][3] =", gradients["da0"][2][3])
print("gradients[\"da0\"].shape =", gradients["da0"].shape)
print("gradients[\"dWax\"][3][1] =", gradients["dWax"][3][1])
print("gradients[\"dWax\"].shape =", gradients["dWax"].shape)
print("gradients[\"dWaa\"][1][2] =", gradients["dWaa"][1][2])
print("gradients[\"dWaa\"].shape =", gradients["dWaa"].shape)
print("gradients[\"dba\"][4] =", gradients["dba"][4])
print("gradients[\"dba\"].shape =", gradients["dba"].shape)
gradients["dx"][1][2] = [-2.07101689 -0.59255627 0.02466855 0.01483317]
gradients["dx"].shape = (3, 10, 4)
gradients["da0"][2][3] = -0.31494237512664996
gradients["da0"].shape = (5, 10)
gradients["dWax"][3][1] = 11.264104496527777
gradients["dWax"].shape = (5, 3)
gradients["dWaa"][1][2] = 2.3033331265798935
gradients["dWaa"].shape = (5, 5)
gradients["dba"][4] = [-0.74747722]
gradients["dba"].shape = (5, 1)
3.2 LSTM backward pass
3.21 One step backward
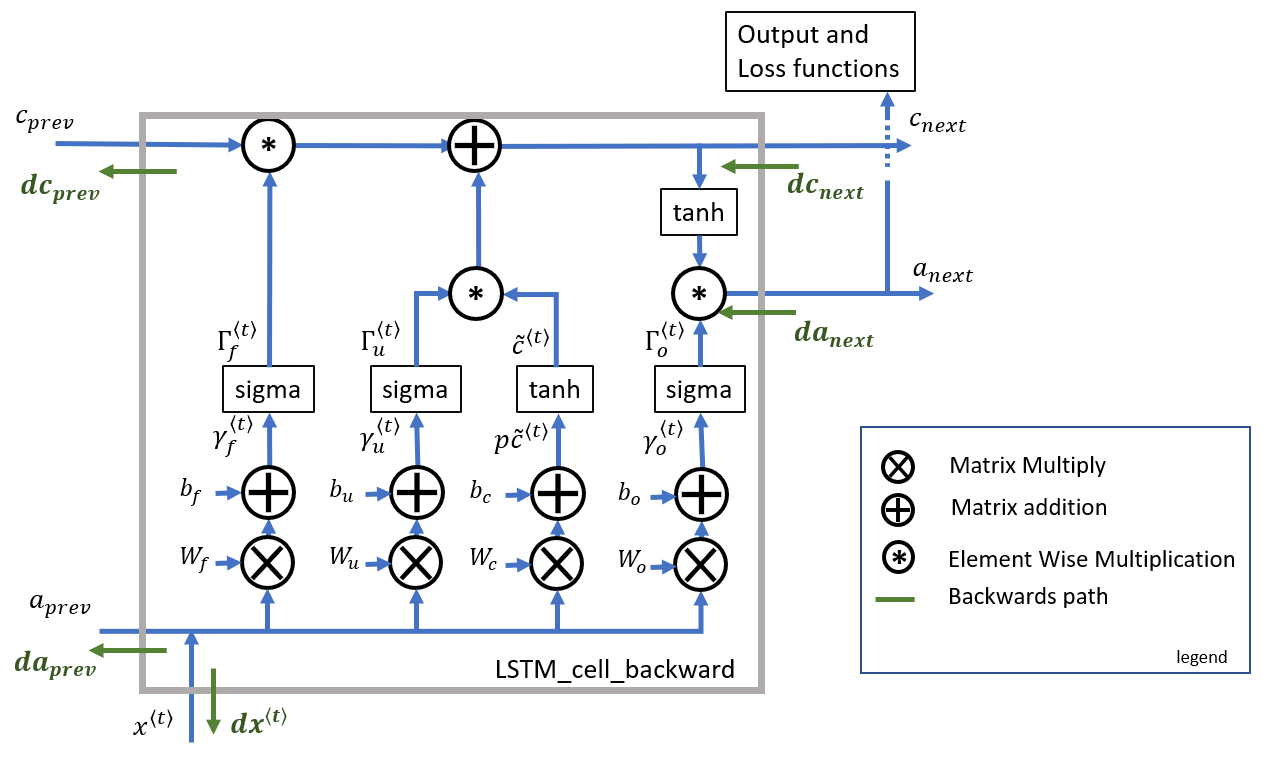
**Figure 8**: lstm_cell_backward. Note the output functions, while part of the lstm_cell_forward, are not included in lstm_cell_backward
3.22 gate derivatives
d\Gamma_o^{\langle t \rangle} &= da_{next}*\tanh(c_{next}) * \Gamma_o^{\langle t \rangle}*\left(1-\Gamma_o^{\langle t \rangle}\right)\tag{7} \\[8pt]
dp\widetilde{c}^{\langle t \rangle} &= \left(dc_{next}*\Gamma_u^{\langle t \rangle}+ \Gamma_o^{\langle t \rangle}* (1-\tanh^2(c_{next})) * \Gamma_u^{\langle t \rangle} * da_{next} \right) * \left(1-\left(\widetilde c^{\langle t \rangle}\right)^2\right) \tag{8} \\[8pt]
d\Gamma_u^{\langle t \rangle} &= \left(dc_{next}*\widetilde{c}^{\langle t \rangle} + \Gamma_o^{\langle t \rangle}* (1-\tanh^2(c_{next})) * \widetilde{c}^{\langle t \rangle} * da_{next}\right)*\Gamma_u^{\langle t \rangle}*\left(1-\Gamma_u^{\langle t \rangle}\right)\tag{9} \\[8pt]
d\Gamma_f^{\langle t \rangle} &= \left(dc_{next}* c_{prev} + \Gamma_o^{\langle t \rangle} * (1-\tanh^2(c_{next})) * c_{prev} * da_{next}\right)*\Gamma_f^{\langle t \rangle}*\left(1-\Gamma_f^{\langle t \rangle}\right)\tag{10}
\end{align}
\]
3.23 parameter derivatives
\(dW_f = d\Gamma_f^{\langle t \rangle} \begin{bmatrix} a_{prev} \\ x_t\end{bmatrix}^T \tag{11}\)
\(dW_u = d\Gamma_u^{\langle t \rangle} \begin{bmatrix} a_{prev} \\ x_t\end{bmatrix}^T \tag{12}\)
\(dW_c = dp\widetilde c^{\langle t \rangle} \begin{bmatrix} a_{prev} \\ x_t\end{bmatrix}^T \tag{13}\)
\(dW_o = d\Gamma_o^{\langle t \rangle} \begin{bmatrix} a_{prev} \\ x_t\end{bmatrix}^T \tag{14}\)
为了计算 \(db_f, db_u, db_c, db_o\) 你需要在 \(d\Gamma_f^{\langle t \rangle}, d\Gamma_u^{\langle t \rangle}, dp\tilde c^{\langle t \rangle}, d\Gamma_o^{\langle t \rangle}\) 上在horizontal axis(axis=1) 进行求和。需要使用 keep_dims = True 选项.
\(\displaystyle db_f = \sum_{batch}d\Gamma_f^{\langle t \rangle}\tag{15}\)
\(\displaystyle db_u = \sum_{batch}d\Gamma_u^{\langle t \rangle}\tag{16}\)
\(\displaystyle db_c = \sum_{batch}d\Gamma_c^{\langle t \rangle}\tag{17}\)
\(\displaystyle db_o = \sum_{batch}d\Gamma_o^{\langle t \rangle}\tag{18}\)
最后,需要计算先前隐藏状态(the previous hidden state), 先前记忆单元(previous memory state), 和 输入(input) 的导数
\]
这里,方程19的权重是第一个n_a,(比如: \(W_f = W_f[:,:n_a]\) 等)
\]
\]
方程21的权重从n_a到结尾,(比如: \(W_f = W_f[:,n_a:]\) 等)
Exercise: Implement lstm_cell_backward 通过实现公式 \(7-18\).
def lstm_cell_backward(da_next, dc_next, cache):
"""
Implement the backward pass for the LSTM-cell (single time-step).
Arguments:
da_next -- Gradients of next hidden state, of shape (n_a, m)
dc_next -- Gradients of next cell state, of shape (n_a, m)
cache -- cache storing information from the forward pass
Returns:
gradients -- python dictionary containing:
dxt -- Gradient of input data at time-step t, of shape (n_x, m)
da_prev -- Gradient w.r.t. the previous hidden state, numpy array of shape (n_a, m)
dc_prev -- Gradient w.r.t. the previous memory state, of shape (n_a, m, T_x)
dWf -- Gradient w.r.t. the weight matrix of the forget gate, numpy array of shape (n_a, n_a + n_x)
dWi -- Gradient w.r.t. the weight matrix of the update gate, numpy array of shape (n_a, n_a + n_x)
dWc -- Gradient w.r.t. the weight matrix of the memory gate, numpy array of shape (n_a, n_a + n_x)
dWo -- Gradient w.r.t. the weight matrix of the output gate, numpy array of shape (n_a, n_a + n_x)
dbf -- Gradient w.r.t. biases of the forget gate, of shape (n_a, 1)
dbi -- Gradient w.r.t. biases of the update gate, of shape (n_a, 1)
dbc -- Gradient w.r.t. biases of the memory gate, of shape (n_a, 1)
dbo -- Gradient w.r.t. biases of the output gate, of shape (n_a, 1)
"""
# Retrieve information from "cache"
(a_next, c_next, a_prev, c_prev, ft, it, cct, ot, xt, parameters) = cache
### START CODE HERE ###
# Retrieve dimensions from xt's and a_next's shape (≈2 lines)
n_x, m = xt.shape
n_a, m = a_next.shape
# Compute gates related derivatives, you can find their values can be found by looking carefully at equations (7) to (10) (≈4 lines)
dot = da_next * np.tanh(c_next) * ot * (1-ot)
dcct = (dc_next * it + ot * (1 - np.square(np.tanh(c_next))) * it * da_next) * (1 - np.square(cct))
dit = (dc_next * cct + ot * (1 - np.square(np.tanh(c_next))) * cct * da_next) * it * (1 - it)
dft = (dc_next * c_prev + ot * (1 - np.square(np.tanh(c_next))) * c_prev * da_next) * ft * (1 - ft)
# Compute parameters related derivatives. Use equations (11)-(14) (≈8 lines)
concat = np.concatenate((a_prev, xt), axis=0).T
dWf = np.dot(dft, concat)
dWi = np.dot(dit, concat)
dWc = np.dot(dcct, concat)
dWo = np.dot(dot, concat)
dbf = np.sum(dft, axis=1, keepdims=True)
dbi = np.sum(dit, axis=1, keepdims=True)
dbc = np.sum(dcct, axis=1, keepdims=True)
dbo = np.sum(dot, axis=1, keepdims=True)
# Compute derivatives w.r.t previous hidden state, previous memory state and input. Use equations (15)-(17). (≈3 lines)
da_prev = np.dot(parameters['Wf'][:,:n_a].T, dft) + np.dot(parameters["Wi"][:, :n_a].T, dit) + np.dot(parameters['Wc'][:,:n_a].T, dcct) + np.dot(parameters['Wo'][:,:n_a].T, dot)
dc_prev = dc_next * ft + ot * (1-np.square(np.tanh(c_next))) * ft * da_next
dxt = np.dot(parameters['Wf'][:, n_a:].T, dft) + np.dot(parameters["Wi"][:, n_a:].T, dit)+ np.dot(parameters['Wc'][:,n_a:].T,dcct) + np.dot(parameters['Wo'][:,n_a:].T, dot)
### END CODE HERE ###
# Save gradients in dictionary
gradients = {"dxt": dxt, "da_prev": da_prev, "dc_prev": dc_prev, "dWf": dWf,"dbf": dbf, "dWi": dWi,"dbi": dbi,
"dWc": dWc,"dbc": dbc, "dWo": dWo,"dbo": dbo}
return gradients
测试:
np.random.seed(1)
xt = np.random.randn(3,10)
a_prev = np.random.randn(5,10)
c_prev = np.random.randn(5,10)
Wf = np.random.randn(5, 5+3)
bf = np.random.randn(5,1)
Wi = np.random.randn(5, 5+3)
bi = np.random.randn(5,1)
Wo = np.random.randn(5, 5+3)
bo = np.random.randn(5,1)
Wc = np.random.randn(5, 5+3)
bc = np.random.randn(5,1)
Wy = np.random.randn(2,5)
by = np.random.randn(2,1)
parameters = {"Wf": Wf, "Wi": Wi, "Wo": Wo, "Wc": Wc, "Wy": Wy, "bf": bf, "bi": bi, "bo": bo, "bc": bc, "by": by}
a_next, c_next, yt, cache = lstm_cell_forward(xt, a_prev, c_prev, parameters)
da_next = np.random.randn(5,10)
dc_next = np.random.randn(5,10)
gradients = lstm_cell_backward(da_next, dc_next, cache)
print("gradients[\"dxt\"][1][2] =", gradients["dxt"][1][2])
print("gradients[\"dxt\"].shape =", gradients["dxt"].shape)
print("gradients[\"da_prev\"][2][3] =", gradients["da_prev"][2][3])
print("gradients[\"da_prev\"].shape =", gradients["da_prev"].shape)
print("gradients[\"dc_prev\"][2][3] =", gradients["dc_prev"][2][3])
print("gradients[\"dc_prev\"].shape =", gradients["dc_prev"].shape)
print("gradients[\"dWf\"][3][1] =", gradients["dWf"][3][1])
print("gradients[\"dWf\"].shape =", gradients["dWf"].shape)
print("gradients[\"dWi\"][1][2] =", gradients["dWi"][1][2])
print("gradients[\"dWi\"].shape =", gradients["dWi"].shape)
print("gradients[\"dWc\"][3][1] =", gradients["dWc"][3][1])
print("gradients[\"dWc\"].shape =", gradients["dWc"].shape)
print("gradients[\"dWo\"][1][2] =", gradients["dWo"][1][2])
print("gradients[\"dWo\"].shape =", gradients["dWo"].shape)
print("gradients[\"dbf\"][4] =", gradients["dbf"][4])
print("gradients[\"dbf\"].shape =", gradients["dbf"].shape)
print("gradients[\"dbi\"][4] =", gradients["dbi"][4])
print("gradients[\"dbi\"].shape =", gradients["dbi"].shape)
print("gradients[\"dbc\"][4] =", gradients["dbc"][4])
print("gradients[\"dbc\"].shape =", gradients["dbc"].shape)
print("gradients[\"dbo\"][4] =", gradients["dbo"][4])
print("gradients[\"dbo\"].shape =", gradients["dbo"].shape)
gradients["dxt"][1][2] = 3.2305591151091875
gradients["dxt"].shape = (3, 10)
gradients["da_prev"][2][3] = -0.06396214197109236
gradients["da_prev"].shape = (5, 10)
gradients["dc_prev"][2][3] = 0.7975220387970015
gradients["dc_prev"].shape = (5, 10)
gradients["dWf"][3][1] = -0.1479548381644968
gradients["dWf"].shape = (5, 8)
gradients["dWi"][1][2] = 1.0574980552259903
gradients["dWi"].shape = (5, 8)
gradients["dWc"][3][1] = 2.3045621636876668
gradients["dWc"].shape = (5, 8)
gradients["dWo"][1][2] = 0.3313115952892109
gradients["dWo"].shape = (5, 8)
gradients["dbf"][4] = [0.18864637]
gradients["dbf"].shape = (5, 1)
gradients["dbi"][4] = [-0.40142491]
gradients["dbi"].shape = (5, 1)
gradients["dbc"][4] = [0.25587763]
gradients["dbc"].shape = (5, 1)
gradients["dbo"][4] = [0.13893342]
gradients["dbo"].shape = (5, 1)
3.3 Backward pass through the LSTM RNN
首先,创建与返回变量相同维度的变量。然后将遍历从结束到开始的所有时间步,并调用在每次迭代时为LSTM实现的单步反向传播功能。然后我们将通过单独求和来更新参数,最后返回一个带有新梯度的字典。
Instructions: 实现 lstm_backward 函数。从 \(T_x\) 开始循环并往回走. 每个step调用 lstm_cell_backward and 更新旧的梯度通过加上新的梯度。Note that dxt is not updated but is stored.
def lstm_backward(da, caches):
"""
Implement the backward pass for the RNN with LSTM-cell (over a whole sequence).
Arguments:
da -- Gradients w.r.t the hidden states, numpy-array of shape (n_a, m, T_x)
caches -- cache storing information from the forward pass (lstm_forward)
Returns:
gradients -- python dictionary containing:
dx -- Gradient of inputs, of shape (n_x, m, T_x)
da0 -- Gradient w.r.t. the previous hidden state, numpy array of shape (n_a, m)
dWf -- Gradient w.r.t. the weight matrix of the forget gate, numpy array of shape (n_a, n_a + n_x)
dWi -- Gradient w.r.t. the weight matrix of the update gate, numpy array of shape (n_a, n_a + n_x)
dWc -- Gradient w.r.t. the weight matrix of the memory gate, numpy array of shape (n_a, n_a + n_x)
dWo -- Gradient w.r.t. the weight matrix of the save gate, numpy array of shape (n_a, n_a + n_x)
dbf -- Gradient w.r.t. biases of the forget gate, of shape (n_a, 1)
dbi -- Gradient w.r.t. biases of the update gate, of shape (n_a, 1)
dbc -- Gradient w.r.t. biases of the memory gate, of shape (n_a, 1)
dbo -- Gradient w.r.t. biases of the save gate, of shape (n_a, 1)
"""
# Retrieve values from the first cache (t=1) of caches.
(caches, x) = caches
(a1, c1, a0, c0, f1, i1, cc1, o1, x1, parameters) = caches[0]
### START CODE HERE ###
# Retrieve dimensions from da's and x1's shapes (≈2 lines)
n_a, m, T_x = da.shape
n_x, m = x1.shape
# initialize the gradients with the right sizes (≈12 lines)
dx = np.zeros([n_x, m, T_x])
da0 = np.zeros([n_a, m])
da_prevt = np.zeros([n_a, m])
dc_prevt = np.zeros([n_a, m])
dWf = np.zeros([n_a, n_a + n_x])
dWi = np.zeros([n_a, n_a + n_x])
dWc = np.zeros([n_a, n_a + n_x])
dWo = np.zeros([n_a, n_a + n_x])
dbf = np.zeros([n_a, 1])
dbi = np.zeros([n_a, 1])
dbc = np.zeros([n_a, 1])
dbo = np.zeros([n_a, 1])
# loop back over the whole sequence
for t in reversed(range(T_x)):
# Compute all gradients using lstm_cell_backward
gradients = lstm_cell_backward(da[:, :, t] + da_prevt, dc_prevt, caches[t])
# Store or add the gradient to the parameters' previous step's gradient
da_prevt = gradients['da_prev']
dc_prevt = gradients['dc_prev']
dx[:,:,t] = gradients['dxt']
dWf = dWf + gradients['dWf']
dWi = dWi + gradients['dWi']
dWc = dWc + gradients['dWc']
dWo = dWo + gradients['dWo']
dbf = dbf + gradients['dbf']
dbi = dbi + gradients['dbi']
dbc = dbc + gradients['dbc']
dbo = dbo + gradients['dbo']
# Set the first activation's gradient to the backpropagated gradient da_prev.
da0 = gradients['da_prev']
### END CODE HERE ###
# Store the gradients in a python dictionary
gradients = {"dx": dx, "da0": da0, "dWf": dWf,"dbf": dbf, "dWi": dWi,"dbi": dbi,
"dWc": dWc,"dbc": dbc, "dWo": dWo,"dbo": dbo}
return gradients
测试:
np.random.seed(1)
x_tmp = np.random.randn(3,10,7)
a0_tmp = np.random.randn(5,10)
parameters_tmp = {}
parameters_tmp['Wf'] = np.random.randn(5, 5+3)
parameters_tmp['bf'] = np.random.randn(5,1)
parameters_tmp['Wi'] = np.random.randn(5, 5+3)
parameters_tmp['bi'] = np.random.randn(5,1)
parameters_tmp['Wo'] = np.random.randn(5, 5+3)
parameters_tmp['bo'] = np.random.randn(5,1)
parameters_tmp['Wc'] = np.random.randn(5, 5+3)
parameters_tmp['bc'] = np.random.randn(5,1)
parameters_tmp['Wy'] = np.zeros((2,5)) # unused, but needed for lstm_forward
parameters_tmp['by'] = np.zeros((2,1)) # unused, but needed for lstm_forward
a_tmp, y_tmp, c_tmp, caches_tmp = lstm_forward(x_tmp, a0_tmp, parameters_tmp)
da_tmp = np.random.randn(5, 10, 4)
gradients_tmp = lstm_backward(da_tmp, caches_tmp)
print("gradients[\"dx\"][1][2] =", gradients_tmp["dx"][1][2])
print("gradients[\"dx\"].shape =", gradients_tmp["dx"].shape)
print("gradients[\"da0\"][2][3] =", gradients_tmp["da0"][2][3])
print("gradients[\"da0\"].shape =", gradients_tmp["da0"].shape)
print("gradients[\"dWf\"][3][1] =", gradients_tmp["dWf"][3][1])
print("gradients[\"dWf\"].shape =", gradients_tmp["dWf"].shape)
print("gradients[\"dWi\"][1][2] =", gradients_tmp["dWi"][1][2])
print("gradients[\"dWi\"].shape =", gradients_tmp["dWi"].shape)
print("gradients[\"dWc\"][3][1] =", gradients_tmp["dWc"][3][1])
print("gradients[\"dWc\"].shape =", gradients_tmp["dWc"].shape)
print("gradients[\"dWo\"][1][2] =", gradients_tmp["dWo"][1][2])
print("gradients[\"dWo\"].shape =", gradients_tmp["dWo"].shape)
print("gradients[\"dbf\"][4] =", gradients_tmp["dbf"][4])
print("gradients[\"dbf\"].shape =", gradients_tmp["dbf"].shape)
print("gradients[\"dbi\"][4] =", gradients_tmp["dbi"][4])
print("gradients[\"dbi\"].shape =", gradients_tmp["dbi"].shape)
print("gradients[\"dbc\"][4] =", gradients_tmp["dbc"][4])
print("gradients[\"dbc\"].shape =", gradients_tmp["dbc"].shape)
print("gradients[\"dbo\"][4] =", gradients_tmp["dbo"][4])
print("gradients[\"dbo\"].shape =", gradients_tmp["dbo"].shape)
gradients["dx"][1][2] = [ 0.00218254 0.28205375 -0.48292508 -0.43281115]
gradients["dx"].shape = (3, 10, 4)
gradients["da0"][2][3] = 0.312770310257
gradients["da0"].shape = (5, 10)
gradients["dWf"][3][1] = -0.0809802310938
gradients["dWf"].shape = (5, 8)
gradients["dWi"][1][2] = 0.40512433093
gradients["dWi"].shape = (5, 8)
gradients["dWc"][3][1] = -0.0793746735512
gradients["dWc"].shape = (5, 8)
gradients["dWo"][1][2] = 0.038948775763
gradients["dWo"].shape = (5, 8)
gradients["dbf"][4] = [-0.15745657]
gradients["dbf"].shape = (5, 1)
gradients["dbi"][4] = [-0.50848333]
gradients["dbi"].shape = (5, 1)
gradients["dbc"][4] = [-0.42510818]
gradients["dbc"].shape = (5, 1)
gradients["dbo"][4] = [-0.17958196]
gradients["dbo"].shape = (5, 1)
Sequence Model-week1编程题1(一步步实现RNN与LSTM)的更多相关文章
- 改善深层神经网络-week1编程题(Initializaion)
Initialization 如何选择初始化方式,不同的初始化会导致不同的结果 好的初始化方式: 加速梯度下降的收敛(Speed up the convergence of gradient desc ...
- 改善深层神经网络-week1编程题(Regularization)
Regularization Deep Learning models have so much flexibility and capacity that overfitting can be a ...
- 改善深层神经网络-week1编程题(GradientChecking)
1. Gradient Checking 你被要求搭建一个Deep Learning model来检测欺诈,每当有人付款,你想知道是否该支付可能是欺诈,例如该用户的账户可能已经被黑客掉. 但是,反向传 ...
- Convolutional Neural Network-week1编程题(一步步搭建CNN模型)
Convolutional Neural Networks: Step by Step implement convolutional (CONV) and pooling (POOL) layers ...
- Coursera, Deep Learning 5, Sequence Models, week1 Recurrent Neural Networks
有哪些sequence model Notation: RNN - Recurrent Neural Network 传统NN 在解决sequence input 时有什么问题? RNN就没有上面的问 ...
- Sequence Model-week1编程题2-Character level language model【RNN生成恐龙名 LSTM生成莎士比亚风格文字】
Character level language model - Dinosaurus land 为了构建字符级语言模型来生成新的名称,你的模型将学习不同的名字,并随机生成新的名字. 任务清单: 如何 ...
- Sequence Model-week1编程题3-用LSTM网络生成爵士乐
Improvise a Jazz Solo with an LSTM Network 实现使用LSTM生成音乐的模型,你可以在结束时听你自己的音乐,接下来你将会学习到: 使用LSTM生成音乐 使用深度 ...
- Sequence Model-week3编程题1-Neural Machine Translation with Attention
1. Neural Machine Translation 下面将构建一个神经机器翻译(NMT)模型,将人类可读日期 ("25th of June, 2009") 转换为机器可读日 ...
- 剑指offer编程题66道题 1-25
1.二维数组中的查找 题目描述 在一个二维数组中,每一行都按照从左到右递增的顺序排序,每一列都按照从上到下递增的顺序排序.请完成一个函数,输入这样的一个二维数组和一个整数,判断数组中是否含有该整数. ...
随机推荐
- 学习Tomcat(一)之容器概览
Tomcat是Apache软件基金会的一个顶级项目,由Apache.Sun和其它一些公司及个人共同开发,是目前比较流行的Web服务器之一.Tomcat是一个开源的.小型的轻量级应用服务器,具有占用系统 ...
- Java跨平台原理(字节码文件,虚拟机)
介绍 C/C++语言都直接编译成针对特定平台机器码.如果要跨平台,需要使用相应的编译器重新编译. Java源程序(.java)要先编译成与平台无关的字节码文件(.class),然后字节码文件再解释成机 ...
- 【PHP数据结构】栈和队列的应用
通过栈和队列的学习,我们似乎会感觉到其实数据结构还是非常简单的嘛.当然,这只是一个开始,我们从顺序表.链表开始,到现在的栈和队列,其实都是为了将来在铺路.在树和图的遍历算法中,都可以见到栈和队列的身影 ...
- 华为云计算IE面试笔记-FusionSphere Openstack有哪些关键组件,各组件主要功能是什么?三种存储接入组件的差异有哪些?
1. Nova:在OpenStack环境中提供计算服务,负责计算实例(VM,云主机)生命周期的管理,包括生成.调度和回收.Nova不负责计算实例的告警上报(FC管). 2. Cinder:为计算实例提 ...
- 修改CentOS ll命令显示时间格式
临时更改显示样式,当会话结束后恢复原来的样式: export TIME_STYLE='+%Y-%m-%d %H:%M:%S' 永久改变显示样式,更改后的效果会保存下来 修改/etc/profile文件 ...
- [转载]linux下配置mariadb支持中文
转载网址:http://www.cnblogs.com/vingi/articles/4302330.html 修改/etc/mysql/my.cnfOn MySQL 5.5 I have in my ...
- 鸿蒙内核源码分析(信号消费篇) | 谁让CPU连续四次换栈运行 | 百篇博客分析OpenHarmony源码 | v49.04
百篇博客系列篇.本篇为: v49.xx 鸿蒙内核源码分析(信号消费篇) | 谁让CPU连续四次换栈运行 | 51.c.h .o 进程管理相关篇为: v02.xx 鸿蒙内核源码分析(进程管理篇) | 谁 ...
- AT2161-[ARC065D]シャッフル/Shuffling【dp】
正题 题目链接:https://www.luogu.com.cn/problem/AT2161 题目大意 长度为\(n\)的\(0/1\)串,\(m\)个区间,你可以按照顺序任意排列区间中的数字,求最 ...
- P5163-WD与地图【tarjan,整体二分,线段树合并】
正题 题目链接:https://www.luogu.com.cn/problem/P5163 题目大意 给出\(n\)个点\(m\)条有向边,点有权值,要求支持操作 删除一条边 修改一个点的权值 求一 ...
- P1712-[NOI2016]区间【线段树,尺取法】
正题 题目链接:https://www.luogu.com.cn/problem/P1712 题目大意 \(n\)个区间,求出其中\(m\)个区间使得它们有覆盖同一个点且最长区间长度减去最短长度最小. ...