[Model] GoogLeNet
主要就是对Inception Module的理解
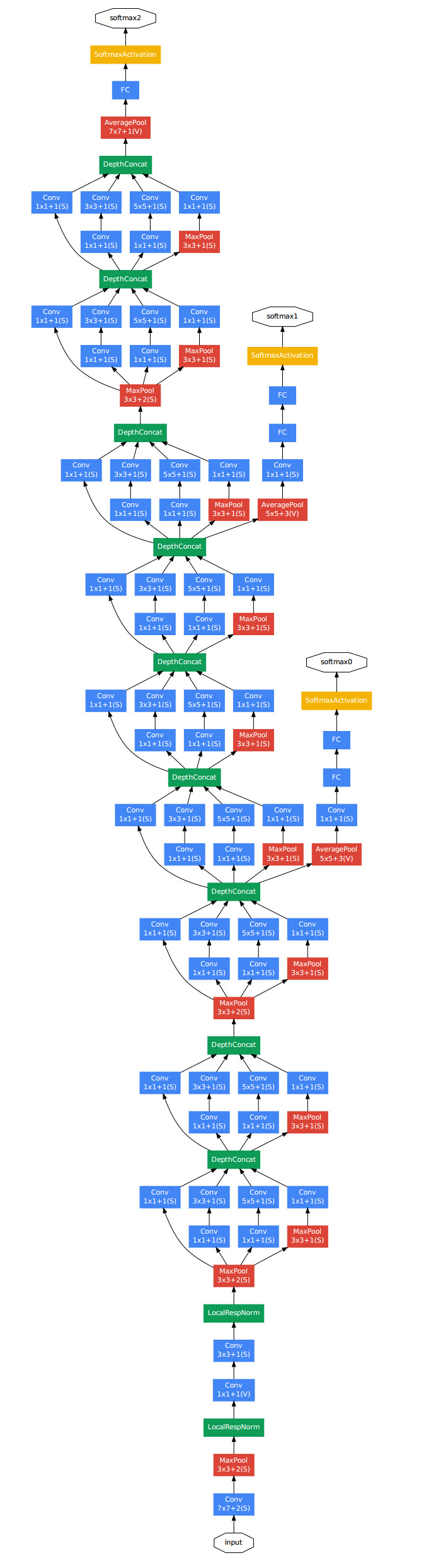
网络结构分析
没有densy layer竟然,这是给手机上运行做铺垫么。
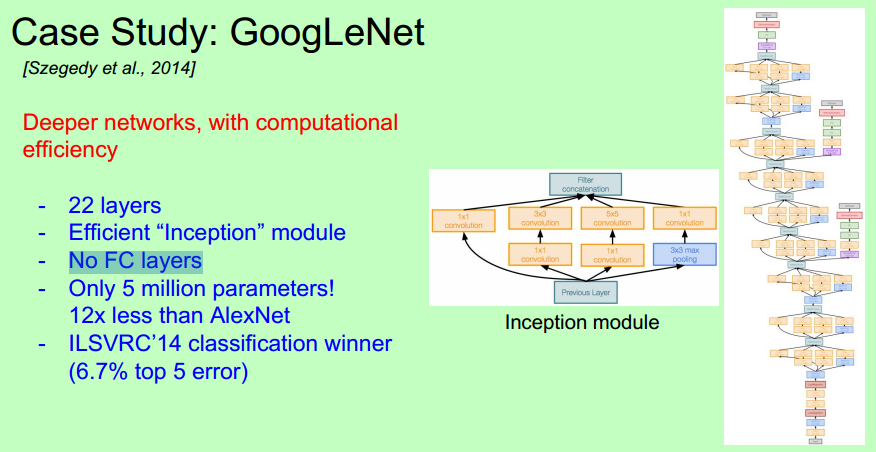
一个新型的模块设计: 【不同类型的layer并行放在了一起】
最初的设计:

对上图做以下说明:
1 . 采用不同大小的卷积核意味着不同大小的感受野,最后拼接意味着不同尺度特征的融合;
2 . 之所以卷积核大小采用1、3和5,主要是为了方便对齐。因为设定卷积步长stride=1之后,只要分别设定pad=0、1、2,那么卷积之后便可以得到相同维度的特征,然后这些特征就可以直接拼接在一起了;
3 . 文章说很多地方都表明pooling挺有效,所以Inception里面也嵌入了。
4 . 网络越到后面,特征越抽象,而且每个特征所涉及的感受野也更大了,因此随着层数的增加,3x3和5x5卷积的比例也要增加。
但是,使用5x5的卷积核仍然会带来巨大的计算量。 为此,文章借鉴NIN2,采用1x1卷积核来进行降维。
例如:上一层的输出为100x100x128,经过具有256个输出的5x5卷积层之后(stride=1,pad=2),输出数据为100x100x256。其中,卷积层的参数为128x5x5x256 [入通道*卷积长*卷积宽*出通道]。
假如上一层输出先经过具有32个输出的1x1卷积层,再经过具有256个输出的5x5卷积层,那么最终的输出数据仍为为100x100x256,但卷积参数量已经减少为128x1x1x32 + 32x5x5x256,大约减少了4倍。
[其实就是通道数减少一下的操作]
故,有了如下设计,插入了1*1的卷积核.
具体改进后的Inception Module如下图:

Auxiliary classification outputs设计:

From: http://www.cnblogs.com/hansjorn/p/7522084.html
对上图做如下说明:
1 . 显然GoogLeNet采用了模块化的结构,方便增添和修改;
2 . 网络最后采用了average pooling来代替全连接层,想法来自NIN,事实证明可以将TOP1 accuracy提高0.6%。但是,实际在最后还是加了一个全连接层,主要是为了方便以后大家finetune;
3 . 虽然移除了全连接,但是网络中依然使用了Dropout ;
4 . 为了避免梯度消失,网络额外增加了2个辅助的softmax用于向前传导梯度。文章中说这两个辅助的分类器的loss应该加一个衰减系数,但看caffe中的model也没有加任何衰减。此外,实际测试的时候,这两个额外的softmax会被去掉。
以上就是最初的v1型号
From: http://blog.csdn.net/u010025211/article/details/51206237
google Inception v1 - v4 papers 发展历程
先上Paper列表:
- [v1] Going Deeper with Convolutions, 6.67% test error, http://arxiv.org/abs/1409.4842
- [v2] Batch Normalization: Accelerating Deep Network Training by Reducing Internal Covariate Shift, 4.8% test error, http://arxiv.org/abs/1502.03167
- [v3] Rethinking the Inception Architecture for Computer Vision, 3.5% test error, http://arxiv.org/abs/1512.00567
- [v4] Inception-v4, Inception-ResNet and the Impact of Residual Connections on Learning, 3.08% test error, http://arxiv.org/abs/1602.07261
大体思路:
- Inception v1的网络,将1x1,3x3,5x5的conv和3x3的pooling,stack在一起,一方面增加了网络的width,另一方面增加了网络对尺度的适应性;
- v2的网络在v1的基础上,进行了改进,一方面了加入了BN层,减少了Internal Covariate Shift(内部neuron的数据分布发生变化),使每一层的输出都规范化到一个N(0, 1)的高斯,另外一方面学习VGG用2个3x3的conv替代inception模块中的5x5,既降低了参数数量,也加速计算;
- v3一个最重要的改进是分解(Factorization),将7x7分解成两个一维的卷积(1x7,7x1),3x3也是一样(1x3,3x1),这样的好处,既可以加速计算(多余的计算能力可以用来加深网络),又可以将1个conv拆成2个conv,使得网络深度进一步增加,增加了网络的非线性,还有值得注意的地方是网络输入从224x224变为了299x299,更加精细设计了35x35/17x17/8x8的模块;
- v4研究了Inception模块结合Residual Connection能不能有改进?发现ResNet的结构可以极大地加速训练,同时性能也有提升,得到一个Inception-ResNet v2网络,同时还设计了一个更深更优化的Inception v4模型,能达到与Inception-ResNet v2相媲美的性能。
关注下Inception的写法: models/research/slim/nets/inception_v1.py
# Copyright 2016 The TensorFlow Authors. All Rights Reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
# ==============================================================================
"""Contains the definition for inception v1 classification network.""" from __future__ import absolute_import
from __future__ import division
from __future__ import print_function import tensorflow as tf from nets import inception_utils slim = tf.contrib.slim
trunc_normal = lambda stddev: tf.truncated_normal_initializer(0.0, stddev) def inception_v1_base(inputs,
final_endpoint='Mixed_5c',
scope='InceptionV1'):
"""Defines the Inception V1 base architecture. This architecture is defined in:
Going deeper with convolutions
Christian Szegedy, Wei Liu, Yangqing Jia, Pierre Sermanet, Scott Reed,
Dragomir Anguelov, Dumitru Erhan, Vincent Vanhoucke, Andrew Rabinovich.
http://arxiv.org/pdf/1409.4842v1.pdf. Args:
inputs: a tensor of size [batch_size, height, width, channels].
final_endpoint: specifies the endpoint to construct the network up to. It
can be one of ['Conv2d_1a_7x7', 'MaxPool_2a_3x3', 'Conv2d_2b_1x1',
'Conv2d_2c_3x3', 'MaxPool_3a_3x3', 'Mixed_3b', 'Mixed_3c',
'MaxPool_4a_3x3', 'Mixed_4b', 'Mixed_4c', 'Mixed_4d', 'Mixed_4e',
'Mixed_4f', 'MaxPool_5a_2x2', 'Mixed_5b', 'Mixed_5c']
scope: Optional variable_scope. Returns:
A dictionary from components of the network to the corresponding activation. Raises:
ValueError: if final_endpoint is not set to one of the predefined values.
"""
end_points = {}
with tf.variable_scope(scope, 'InceptionV1', [inputs]):
with slim.arg_scope(
[slim.conv2d, slim.fully_connected],
weights_initializer=trunc_normal(0.01)):
with slim.arg_scope([slim.conv2d, slim.max_pool2d],
stride=1, padding='SAME'):
end_point = 'Conv2d_1a_7x7'
net = slim.conv2d(inputs, 64, [7, 7], stride=2, scope=end_point)
end_points[end_point] = net
if final_endpoint == end_point: return net, end_points
end_point = 'MaxPool_2a_3x3'
net = slim.max_pool2d(net, [3, 3], stride=2, scope=end_point)
end_points[end_point] = net
if final_endpoint == end_point: return net, end_points
end_point = 'Conv2d_2b_1x1'
net = slim.conv2d(net, 64, [1, 1], scope=end_point)
end_points[end_point] = net
if final_endpoint == end_point: return net, end_points
end_point = 'Conv2d_2c_3x3'
net = slim.conv2d(net, 192, [3, 3], scope=end_point)
end_points[end_point] = net
if final_endpoint == end_point: return net, end_points
#--------------------------------------------------------------------------------
end_point = 'MaxPool_3a_3x3'
net = slim.max_pool2d(net, [3, 3], stride=2, scope=end_point)
end_points[end_point] = net
if final_endpoint == end_point: return net, end_points end_point = 'Mixed_3b'
with tf.variable_scope(end_point):
with tf.variable_scope('Branch_0'):
branch_0 = slim.conv2d(net, 64, [1, 1], scope='Conv2d_0a_1x1')
with tf.variable_scope('Branch_1'):
branch_1 = slim.conv2d(net, 96, [1, 1], scope='Conv2d_0a_1x1')
branch_1 = slim.conv2d(branch_1, 128, [3, 3], scope='Conv2d_0b_3x3')
with tf.variable_scope('Branch_2'):
branch_2 = slim.conv2d(net, 16, [1, 1], scope='Conv2d_0a_1x1')
branch_2 = slim.conv2d(branch_2, 32, [3, 3], scope='Conv2d_0b_3x3')
with tf.variable_scope('Branch_3'):
branch_3 = slim.max_pool2d(net, [3, 3], scope='MaxPool_0a_3x3')
branch_3 = slim.conv2d(branch_3, 32, [1, 1], scope='Conv2d_0b_1x1')
net = tf.concat(axis=3, values=[branch_0, branch_1, branch_2, branch_3])
end_points[end_point] = net
if final_endpoint == end_point: return net, end_points
#---------------------------------------------------------------------------------
end_point = 'Mixed_3c'
with tf.variable_scope(end_point):
with tf.variable_scope('Branch_0'):
branch_0 = slim.conv2d(net, 128, [1, 1], scope='Conv2d_0a_1x1')
with tf.variable_scope('Branch_1'):
branch_1 = slim.conv2d(net, 128, [1, 1], scope='Conv2d_0a_1x1')
branch_1 = slim.conv2d(branch_1, 192, [3, 3], scope='Conv2d_0b_3x3')
with tf.variable_scope('Branch_2'):
branch_2 = slim.conv2d(net, 32, [1, 1], scope='Conv2d_0a_1x1')
branch_2 = slim.conv2d(branch_2, 96, [3, 3], scope='Conv2d_0b_3x3')
with tf.variable_scope('Branch_3'):
branch_3 = slim.max_pool2d(net, [3, 3], scope='MaxPool_0a_3x3')
branch_3 = slim.conv2d(branch_3, 64, [1, 1], scope='Conv2d_0b_1x1')
net = tf.concat(
axis=3, values=[branch_0, branch_1, branch_2, branch_3])
end_points[end_point] = net
if final_endpoint == end_point: return net, end_points end_point = 'MaxPool_4a_3x3'
net = slim.max_pool2d(net, [3, 3], stride=2, scope=end_point)
end_points[end_point] = net
if final_endpoint == end_point: return net, end_points end_point = 'Mixed_4b'
with tf.variable_scope(end_point):
with tf.variable_scope('Branch_0'):
branch_0 = slim.conv2d(net, 192, [1, 1], scope='Conv2d_0a_1x1')
with tf.variable_scope('Branch_1'):
branch_1 = slim.conv2d(net, 96, [1, 1], scope='Conv2d_0a_1x1')
branch_1 = slim.conv2d(branch_1, 208, [3, 3], scope='Conv2d_0b_3x3')
with tf.variable_scope('Branch_2'):
branch_2 = slim.conv2d(net, 16, [1, 1], scope='Conv2d_0a_1x1')
branch_2 = slim.conv2d(branch_2, 48, [3, 3], scope='Conv2d_0b_3x3')
with tf.variable_scope('Branch_3'):
branch_3 = slim.max_pool2d(net, [3, 3], scope='MaxPool_0a_3x3')
branch_3 = slim.conv2d(branch_3, 64, [1, 1], scope='Conv2d_0b_1x1')
net = tf.concat(
axis=3, values=[branch_0, branch_1, branch_2, branch_3])
end_points[end_point] = net
if final_endpoint == end_point: return net, end_points end_point = 'Mixed_4c'
with tf.variable_scope(end_point):
with tf.variable_scope('Branch_0'):
branch_0 = slim.conv2d(net, 160, [1, 1], scope='Conv2d_0a_1x1')
with tf.variable_scope('Branch_1'):
branch_1 = slim.conv2d(net, 112, [1, 1], scope='Conv2d_0a_1x1')
branch_1 = slim.conv2d(branch_1, 224, [3, 3], scope='Conv2d_0b_3x3')
with tf.variable_scope('Branch_2'):
branch_2 = slim.conv2d(net, 24, [1, 1], scope='Conv2d_0a_1x1')
branch_2 = slim.conv2d(branch_2, 64, [3, 3], scope='Conv2d_0b_3x3')
with tf.variable_scope('Branch_3'):
branch_3 = slim.max_pool2d(net, [3, 3], scope='MaxPool_0a_3x3')
branch_3 = slim.conv2d(branch_3, 64, [1, 1], scope='Conv2d_0b_1x1')
net = tf.concat(
axis=3, values=[branch_0, branch_1, branch_2, branch_3])
end_points[end_point] = net
if final_endpoint == end_point: return net, end_points end_point = 'Mixed_4d'
with tf.variable_scope(end_point):
with tf.variable_scope('Branch_0'):
branch_0 = slim.conv2d(net, 128, [1, 1], scope='Conv2d_0a_1x1')
with tf.variable_scope('Branch_1'):
branch_1 = slim.conv2d(net, 128, [1, 1], scope='Conv2d_0a_1x1')
branch_1 = slim.conv2d(branch_1, 256, [3, 3], scope='Conv2d_0b_3x3')
with tf.variable_scope('Branch_2'):
branch_2 = slim.conv2d(net, 24, [1, 1], scope='Conv2d_0a_1x1')
branch_2 = slim.conv2d(branch_2, 64, [3, 3], scope='Conv2d_0b_3x3')
with tf.variable_scope('Branch_3'):
branch_3 = slim.max_pool2d(net, [3, 3], scope='MaxPool_0a_3x3')
branch_3 = slim.conv2d(branch_3, 64, [1, 1], scope='Conv2d_0b_1x1')
net = tf.concat(
axis=3, values=[branch_0, branch_1, branch_2, branch_3])
end_points[end_point] = net
if final_endpoint == end_point: return net, end_points end_point = 'Mixed_4e'
with tf.variable_scope(end_point):
with tf.variable_scope('Branch_0'):
branch_0 = slim.conv2d(net, 112, [1, 1], scope='Conv2d_0a_1x1')
with tf.variable_scope('Branch_1'):
branch_1 = slim.conv2d(net, 144, [1, 1], scope='Conv2d_0a_1x1')
branch_1 = slim.conv2d(branch_1, 288, [3, 3], scope='Conv2d_0b_3x3')
with tf.variable_scope('Branch_2'):
branch_2 = slim.conv2d(net, 32, [1, 1], scope='Conv2d_0a_1x1')
branch_2 = slim.conv2d(branch_2, 64, [3, 3], scope='Conv2d_0b_3x3')
with tf.variable_scope('Branch_3'):
branch_3 = slim.max_pool2d(net, [3, 3], scope='MaxPool_0a_3x3')
branch_3 = slim.conv2d(branch_3, 64, [1, 1], scope='Conv2d_0b_1x1')
net = tf.concat(
axis=3, values=[branch_0, branch_1, branch_2, branch_3])
end_points[end_point] = net
if final_endpoint == end_point: return net, end_points end_point = 'Mixed_4f'
with tf.variable_scope(end_point):
with tf.variable_scope('Branch_0'):
branch_0 = slim.conv2d(net, 256, [1, 1], scope='Conv2d_0a_1x1')
with tf.variable_scope('Branch_1'):
branch_1 = slim.conv2d(net, 160, [1, 1], scope='Conv2d_0a_1x1')
branch_1 = slim.conv2d(branch_1, 320, [3, 3], scope='Conv2d_0b_3x3')
with tf.variable_scope('Branch_2'):
branch_2 = slim.conv2d(net, 32, [1, 1], scope='Conv2d_0a_1x1')
branch_2 = slim.conv2d(branch_2, 128, [3, 3], scope='Conv2d_0b_3x3')
with tf.variable_scope('Branch_3'):
branch_3 = slim.max_pool2d(net, [3, 3], scope='MaxPool_0a_3x3')
branch_3 = slim.conv2d(branch_3, 128, [1, 1], scope='Conv2d_0b_1x1')
net = tf.concat(
axis=3, values=[branch_0, branch_1, branch_2, branch_3])
end_points[end_point] = net
if final_endpoint == end_point: return net, end_points end_point = 'MaxPool_5a_2x2'
net = slim.max_pool2d(net, [2, 2], stride=2, scope=end_point)
end_points[end_point] = net
if final_endpoint == end_point: return net, end_points end_point = 'Mixed_5b'
with tf.variable_scope(end_point):
with tf.variable_scope('Branch_0'):
branch_0 = slim.conv2d(net, 256, [1, 1], scope='Conv2d_0a_1x1')
with tf.variable_scope('Branch_1'):
branch_1 = slim.conv2d(net, 160, [1, 1], scope='Conv2d_0a_1x1')
branch_1 = slim.conv2d(branch_1, 320, [3, 3], scope='Conv2d_0b_3x3')
with tf.variable_scope('Branch_2'):
branch_2 = slim.conv2d(net, 32, [1, 1], scope='Conv2d_0a_1x1')
branch_2 = slim.conv2d(branch_2, 128, [3, 3], scope='Conv2d_0a_3x3')
with tf.variable_scope('Branch_3'):
branch_3 = slim.max_pool2d(net, [3, 3], scope='MaxPool_0a_3x3')
branch_3 = slim.conv2d(branch_3, 128, [1, 1], scope='Conv2d_0b_1x1')
net = tf.concat(
axis=3, values=[branch_0, branch_1, branch_2, branch_3])
end_points[end_point] = net
if final_endpoint == end_point: return net, end_points end_point = 'Mixed_5c'
with tf.variable_scope(end_point):
with tf.variable_scope('Branch_0'):
branch_0 = slim.conv2d(net, 384, [1, 1], scope='Conv2d_0a_1x1')
with tf.variable_scope('Branch_1'):
branch_1 = slim.conv2d(net, 192, [1, 1], scope='Conv2d_0a_1x1')
branch_1 = slim.conv2d(branch_1, 384, [3, 3], scope='Conv2d_0b_3x3')
with tf.variable_scope('Branch_2'):
branch_2 = slim.conv2d(net, 48, [1, 1], scope='Conv2d_0a_1x1')
branch_2 = slim.conv2d(branch_2, 128, [3, 3], scope='Conv2d_0b_3x3')
with tf.variable_scope('Branch_3'):
branch_3 = slim.max_pool2d(net, [3, 3], scope='MaxPool_0a_3x3')
branch_3 = slim.conv2d(branch_3, 128, [1, 1], scope='Conv2d_0b_1x1')
net = tf.concat(
axis=3, values=[branch_0, branch_1, branch_2, branch_3])
end_points[end_point] = net
if final_endpoint == end_point: return net, end_points
raise ValueError('Unknown final endpoint %s' % final_endpoint) def inception_v1(inputs,
num_classes=1000,
is_training=True,
dropout_keep_prob=0.8,
prediction_fn=slim.softmax,
spatial_squeeze=True,
reuse=None,
scope='InceptionV1'):
"""Defines the Inception V1 architecture. This architecture is defined in: Going deeper with convolutions
Christian Szegedy, Wei Liu, Yangqing Jia, Pierre Sermanet, Scott Reed,
Dragomir Anguelov, Dumitru Erhan, Vincent Vanhoucke, Andrew Rabinovich.
http://arxiv.org/pdf/1409.4842v1.pdf. The default image size used to train this network is 224x224. Args:
inputs: a tensor of size [batch_size, height, width, channels].
num_classes: number of predicted classes.
is_training: whether is training or not.
dropout_keep_prob: the percentage of activation values that are retained.
prediction_fn: a function to get predictions out of logits.
spatial_squeeze: if True, logits is of shape [B, C], if false logits is of
shape [B, 1, 1, C], where B is batch_size and C is number of classes.
reuse: whether or not the network and its variables should be reused. To be
able to reuse 'scope' must be given.
scope: Optional variable_scope. Returns:
logits: the pre-softmax activations, a tensor of size
[batch_size, num_classes]
end_points: a dictionary from components of the network to the corresponding
activation.
"""
# Final pooling and prediction
with tf.variable_scope(scope, 'InceptionV1', [inputs, num_classes],
reuse=reuse) as scope:
with slim.arg_scope([slim.batch_norm, slim.dropout],
is_training=is_training):
net, end_points = inception_v1_base(inputs, scope=scope)
with tf.variable_scope('Logits'):
net = slim.avg_pool2d(net, [7, 7], stride=1, scope='AvgPool_0a_7x7')
net = slim.dropout(net,
dropout_keep_prob, scope='Dropout_0b')
logits = slim.conv2d(net, num_classes, [1, 1], activation_fn=None,
normalizer_fn=None, scope='Conv2d_0c_1x1')
if spatial_squeeze:
logits = tf.squeeze(logits, [1, 2], name='SpatialSqueeze') end_points['Logits'] = logits
end_points['Predictions'] = prediction_fn(logits, scope='Predictions')
return logits, end_points
inception_v1.default_image_size = 224 inception_v1_arg_scope = inception_utils.inception_arg_scope
[Model] GoogLeNet的更多相关文章
- 【深度学习系列】用PaddlePaddle和Tensorflow实现经典CNN网络GoogLeNet
前面讲了LeNet.AlexNet和Vgg,这周来讲讲GoogLeNet.GoogLeNet是由google的Christian Szegedy等人在2014年的论文<Going Deeper ...
- 基于GoogLeNet的不同花分类微调训练案例
import tensorflow as tf from tensorflow.contrib.slim import nets slim = tf.contrib.slim import numpy ...
- GoogLeNet网络的Pytorch实现
1.文章原文地址 Going deeper with convolutions 2.文章摘要 我们提出了一种代号为Inception的深度卷积神经网络,它在ILSVRC2014的分类和检测任务上都取得 ...
- 本人AI知识体系导航 - AI menu
Relevant Readable Links Name Interesting topic Comment Edwin Chen 非参贝叶斯 徐亦达老板 Dirichlet Process 学习 ...
- Spring Boot笔记一
Spring Boot 入门 Spring Boot 简介 > 简化Spring应用开发的一个框架:> 整个Spring技术栈的一个大整合:> J2EE开发的一站式解决方案: 微服务 ...
- #Deep Learning回顾#之LeNet、AlexNet、GoogLeNet、VGG、ResNet
CNN的发展史 上一篇回顾讲的是2006年Hinton他们的Science Paper,当时提到,2006年虽然Deep Learning的概念被提出来了,但是学术界的大家还是表示不服.当时有流传的段 ...
- GoogLeNet学习心得
转自:http://blog.csdn.net/liumaolincycle/article/details/50471289#t0 综述: http://blog.csdn.net/sunbaigu ...
- GoogleNet:inceptionV3论文学习
Rethinking the Inception Architecture for Computer Vision 论文地址:https://arxiv.org/abs/1512.00567 Abst ...
- Caffe-5.2-(GPU完整流程)训练(依据googlenet微调)
上一篇使用caffenet的模型微调.但由于caffenet有220M太大,測试速度太慢.因此换为googlenet. 1. 训练 迭代了2800次时死机,大概20分钟. 使用的是2000次的模型. ...
随机推荐
- mysql 跨表更新
update hhs_goods as g INNER JOIN (select SUM(goods_number) as goods_number,goods_id from hhs_order_g ...
- linux ulimit具体修改服务器配置
ulimit -a 显示当前用户的各种限制. ulimit -n 的数值表示每个进程可以打开的文件数目. 一般情况下, ulimit -n 的数值是1024. 当进程打开的文件数目超过此限 ...
- C#用WebBrowser与WIN API辅助模拟获取网站完整Cookie
网上找到的可以完整获取Cookie的方法,转载一下希望能帮助更多人. 亲测可用 在Winform中使用WebBrowser控件获取网站的Cookie有时候是不完整的,默认调用Document.Cook ...
- 导出putty配置
原文链接:http://downloadsquad.switched.com/2007/02/01/howto-transfer-your-putty-settings-between-compute ...
- postgresql 窗口函数排序实例
经常遇到一种应用场景,将部分行的内容进行汇总.比较.排序. 比如数据表名称test.test2 select num,province from test.test2 得到结果: ;"黑龙江 ...
- 3728 联合权值[NOIP 2014 Day1 T2]
来源:NOIP2014 Day1 T2 OJ链接: http://codevs.cn/problem/3728/ https://www.luogu.org/problemnew/show/P1351 ...
- sql server 2008 express 安装的时提示“重启计算机失败"
sql server 2008 express 安装的时提示"重启计算机失败" 解决办法: 打开注册表编辑器(regedit.exe),在HKEY_LOCAL_MACHINE\SY ...
- Docker 以 docker 方式运行 jenkins
https://testerhome.com/topics/5798 Docker 以 docker 方式运行 jenkins jmcn · 2016年08月26日 · 最后由 blueshark 回 ...
- 详解shell编程中2>&1用法
在使用 linux 命令或者 shell 编程时,这个用法常会遇到 2>&1 下面看一个命令示例,然后分析下他是如何工作的: ls foo > /dev/null 2>&am ...
- [ci]jenkins server启动,通过jnlp的方式启动slave(容器模式)
jenkins server启动,通过jnlp的方式启动slave. java -jar jenkins.jar 配置jnlp端口--全局安全 配置云 配置项目 执行成功