[转]PID控制算法原理
PID控制算法是工业界使用极其广泛的一个负反馈算法,相信这个算法在做系统软件时也有用武之处,这里摘录了知乎上的一篇文章,后面学习更多后自己总结一篇
以下为原文:
PID控制应该算是应用非常广泛的控制算法了。小到控制一个元件的温度,大到控制无人机的飞行姿态和飞行速度等等,都可以使用PID控制。这里我们从原理上来理解PID控制。
PID(proportion integration differentiation)其实就是指比例,积分,微分控制。先把图片和公式摆出来,看不懂没关系。(一开始看这个算法,公式能看懂,具体怎么用怎么写代码也知道,但是就是不知道原理,不知道为什么要用比例,微分,积分这3个项才能实现最好的控制,用其中两个为什么不行,用了3个项能好在哪里,每一个项各有什么作用)
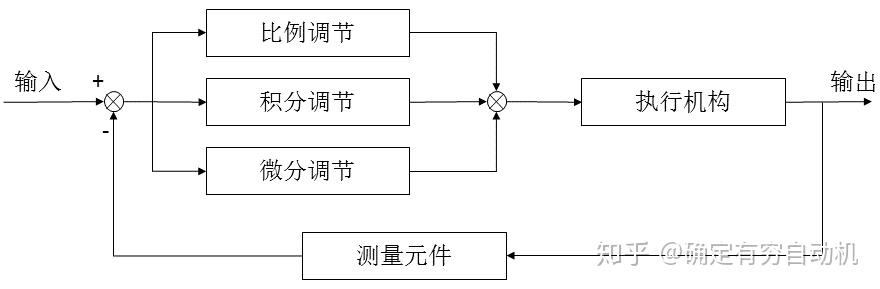

总的来说,当得到系统的输出后,将输出经过比例,积分,微分3种运算方式,叠加到输入中,从而控制系统的行为,下面用一个简单的实例来说明。
比例控制算法
我们先说PID中最简单的比例控制,抛开其他两个不谈。还是用一个经典的例子吧。假设我有一个水缸,最终的控制目的是要保证水缸里的水位永远的维持在1米的高度。假设初始时刻,水缸里的水位是0.2米,那么当前时刻的水位和目标水位之间是存在一个误差的error,且error为0.8.这个时候,假设旁边站着一个人,这个人通过往缸里加水的方式来控制水位。如果单纯的用比例控制算法,就是指加入的水量u和误差error是成正比的。即
u=kp*error
假设kp取0.5,
那么t=1时(表示第1次加水,也就是第一次对系统施加控制),那么u=0.5*0.8=0.4,所以这一次加入的水量会使水位在0.2的基础上上升0.4,达到0.6.
接着,t=2时刻(第2次施加控制),当前水位是0.6,所以error是0.4。u=0.5*0.4=0.2,会使水位再次上升0.2,达到0.8.
如此这么循环下去,就是比例控制算法的运行方法。
可以看到,最终水位会达到我们需要的1米。
但是,单单的比例控制存在着一些不足,其中一点就是 –稳态误差!(我也是看了很多,并且想了好久才想通什么是稳态误差以及为什么有稳态误差)。
像上述的例子,根据kp取值不同,系统最后都会达到1米,只不过kp大了到达的快,kp小了到达的慢一些。不会有稳态误差。但是,考虑另外一种情况,假设这个水缸在加水的过程中,存在漏水的情况,假设每次加水的过程,都会漏掉0.1米高度的水。仍然假设kp取0.5,那么会存在着某种情况,假设经过几次加水,水缸中的水位到0.8时,水位将不会再变换!!!因为,水位为0.8,则误差error=0.2. 所以每次往水缸中加水的量为u=0.5*0.2=0.1.同时,每次加水,缸里又会流出去0.1米的水!!!加入的水和流出的水相抵消,水位将不再变化!!
也就是说,我的目标是1米,但是最后系统达到0.8米的水位就不再变化了,且系统已经达到稳定。由此产生的误差就是稳态误差了。
(在实际情况中,这种类似水缸漏水的情况往往更加常见,比如控制汽车运动,摩擦阻力就相当于是“漏水”,控制机械臂、无人机的飞行,各类阻力和消耗都可以理解为本例中的“漏水”)
所以,单独的比例控制,在很多时候并不能满足要求。
积分控制算法
还是用上面的例子,如果仅仅用比例,可以发现存在暂态误差,最后的水位就卡在0.8了。于是,在控制中,我们再引入一个分量,该分量和误差的积分是正比关系。所以,比例+积分控制算法为:
u=kp*error+ ki∗∫ error
还是用上面的例子来说明,第一次的误差error是0.8,第二次的误差是0.4,至此,误差的积分(离散情况下积分其实就是做累加),∫error=0.8+0.4=1.2. 这个时候的控制量,除了比例的那一部分,还有一部分就是一个系数ki乘以这个积分项。由于这个积分项会将前面若干次的误差进行累计,所以可以很好的消除稳态误差(假设在仅有比例项的情况下,系统卡在稳态误差了,即上例中的0.8,由于加入了积分项的存在,会让输入增大,从而使得水缸的水位可以大于0.8,渐渐到达目标的1.0.)这就是积分项的作用。
微分控制算法
换一个另外的例子,考虑刹车情况。平稳的驾驶车辆,当发现前面有红灯时,为了使得行车平稳,基本上提前几十米就放松油门并踩刹车了。当车辆离停车线非常近的时候,则使劲踩刹车,使车辆停下来。整个过程可以看做一个加入微分的控制策略。
微分,说白了在离散情况下,就是error的差值,就是t时刻和t-1时刻error的差,即u=kd*(error(t)-error(t-1)),其中的kd是一个系数项。可以看到,在刹车过程中,因为error是越来越小的,所以这个微分控制项一定是负数,在控制中加入一个负数项,他存在的作用就是为了防止汽车由于刹车不及时而闯过了线。从常识上可以理解,越是靠近停车线,越是应该注意踩刹车,不能让车过线,所以这个微分项的作用,就可以理解为刹车,当车离停车线很近并且车速还很快时,这个微分项的绝对值(实际上是一个负数)就会很大,从而表示应该用力踩刹车才能让车停下来。
切换到上面给水缸加水的例子,就是当发现水缸里的水快要接近1的时候,加入微分项,可以防止给水缸里的水加到超过1米的高度,说白了就是减少控制过程中的震荡。
现在在回头看这个公式,就很清楚了
括号内第一项是比例项,第二项是积分项,第三项是微分项,前面仅仅是一个系数。很多情况下,仅仅需要在离散的时候使用,则控制可以化为

每一项前面都有系数,这些系数都是需要实验中去尝试然后确定的,为了方便起见,将这些系数进行统一一下:

这样看就清晰很多了,且比例,微分,积分每个项前面都有一个系数,且离散化的公式,很适合编程实现。
讲到这里,PID的原理和方法就说完了,剩下的就是实践了。在真正的工程实践中,最难的是如果确定三个项的系数,这就需要大量的实验以及经验来决定了。通过不断的尝试和正确的思考,就能选取合适的系数,实现优良的控制器。
文章发布到现在,发现评论中有些很有价值的信息,所以在此将评论中的精彩内容也做一个总结,方便大家进一步学习和交流。大家对于文章有任何的意见或建议,以及关于相关内容的讨论和感想,都可以发到评论里与大家一起交流,共同进步。
那为啥不加入更进一步的,微分的微分或者微分的微分的微分呢。如果有其他因素,该如何使用PID呢 ——
作者回复:我觉这个问题问的非常好,所以我自己先回答一下我的看法。PID这个算法呢,你说它有严格的数学证明吗,貌似也没有,说它不严谨吧,但是某些情况下确实有挺管用的。在使用的过程中,各个分量的各个参数基本上都需要通过实验试出来的。某些情况下仅仅只有P或者只有PI,效果就达到要求了,所以也就不需要再考虑其他的了。PID三种分量的结合使用,加上大量的实验来确定合适的参数,基本上就能满足我们的需求了。 ——
一般来说微分环节相当于放大了反馈信号中的高频分量,如果取得系数不好会引起高频震荡。所以大部分应用都只采用PI(不影响稳态精度)或者双闭环PI。至于微分的微分等一些量在物理上并没有实际意义,比如调速中转速的微分是加速度,再次微分就基本不用了。当然如果学过自控理论则可以从系统传递函数来分析需要加入什么样的控制器来保持系统稳定收敛。——
好问题,一般情况pi或者pd就能搞定,本来加i就会让系统不稳定,如果外加i或者d系统的稳定性有可能会进一步受影响,具体原因得看博德图解释。不过这种控制器确实有,不过不会直接加,一般配合加一个极点或者一个零点。——
我喜欢这样理解pid: p是控制现在,i是纠正曾经,d是管控未来!只有不忘过往,把握当前,规划未来才能让人生的轨迹按照既定的目标前进。讲真,理解了弹性阻尼系统,对pid的内涵会更加深刻。——
作者回复:其他的很多评论里,也提到了p代表现在,i代表过去的这种观点,这里就不一一列举啦。 ———
转载来源:https://zhuanlan.zhihu.com/p/39573490
[转]PID控制算法原理的更多相关文章
- 一文读懂PID控制算法(抛弃公式,从原理上真正理解PID控制)
PID控制应该算是应用非常广泛的控制算法了.小到控制一个元件的温度,大到控制无人机的飞行姿态和飞行速度等等,都可以使用PID控制.这里我们从原理上来理解PID控制. PID(proportion ...
- PID控制算法的C语言实现一 PID算法原理
本系列是转载............. 全部的程序有一个共同点:就是我没认真去调pid的参数 在工业应用中PID及其衍生算法是应用最广泛的算法之一,是当之无愧的万能算法,如果能够熟练掌握PID算法的设 ...
- PID控制算法
PID控制算法 四轴如何起飞的原理 四轴飞行器的螺旋桨与空气发生相对运动,产生了向上的升力,当升力大于四轴的重力时四轴就可以起飞了. 四轴飞行器飞行过程中如何保持水平: 我们先假设一种理想状况:四个电 ...
- PID控制算法的C语言实现十一 模糊算法简介
在PID控制算法的C语言实现九中,文章已经对模糊PID的实质做了一个简要说明.本来打算等到完成毕业设计,工作稳定了再着力完成剩下的部分.鉴于网友的要求和信任,抽出时间来,对模糊PID做一个较为详细的论 ...
- 023_STM32之PID算法原理及应用
(O)关于程序BUG说明,看最后面的红色字体,视频和源代码中都没有说明 (一)PID控制算法(P:比例 I:积分 D:微分) (二)首先先说明原理,使用的是数字PID算法,模拟PID算法在计算机这样的 ...
- PID控制算法的C语言实现
参考: PID控制器开发笔 浅谈位置式PID 专家PID控制在快速系统中的仿真及应用(这篇了论文介绍的积分分离PID.专家PID(脚本实现和simulink实现)很详细) PID控制算法的C语言实现一 ...
- 数字PID控制算法
增量式PID控制算法 量式PID控制算法 2009-07-18 10:33 (转载 出处blog.ednchina.com/tengjingshu )blog.ednchina.com/tengjin ...
- PID控制算法的简单分析和仿真!
PID算法简单剖析如下: 1.首先我们来看一下PID系统的基本组成模块: 如图所示,图中相关参数的表示如下: r(t):系统实际上需要的输出值,这是一个标准值,在我们设定了之后让这个系统去逼近的一个值 ...
- PID控制算法的C语言实现十 专家PID与模糊PID的C语言实现
本节是PID控制算法的C语言实现系列的最后一节,前面8节中,已经分别从PID的实现到深入的过程进行了一个简要的讲解,从前面的讲解中不难看出,PID的控制思想非常简单,其主要问题点和难点在于比例.积分. ...
随机推荐
- Maze-hdu4035(DP求概率)
链接:http://acm.hdu.edu.cn/showproblem.php?pid=4035 题意: 有n个房间,由n-1条隧道连通起来,实际上就形成了一棵树, 从结点1出发,开始走,在每个结点 ...
- UVa 679 - Dropping Balls【二叉树】【思维题】
题目链接 题目大意: 小球从一棵所有叶子深度相同的二叉树的顶点开始向下落,树开始所有节点都为0.若小球落到节点为0的则往左落,否则向右落.并且小球会改变它经过的节点,0变1,1变0.给定树的深度D和球 ...
- JetBrain(Pycharm,Clion...)的使用优化
我们知道,在JetBrain系列软件中,另起一行继续编辑的快捷是Shift+Enter,这样即使指针没有到达当前行结尾,也可以另起一行,如图1中的情况: >>> Shift+ ...
- P2279 [HNOI2003]消防局的设立
P2279 [HNOI2003]消防局的设立考场上想出了贪心策略,但是处理细节时有点问题,gg了.从(当前深度最大的节点)叶子节点往上跳k个,在这里设消防局,并从消防局遍历k个距离,标记上. #inc ...
- C# SQLiteHelper
using System; using System.Data; using System.Data.Common; using System.Data.SQLite; using System.IO ...
- 向量图兼容组件VectorCompat
向量图兼容组件VectorCompat Android从5.0(API Level 21)开始,支持矢量图和动画矢量图.采用这两种图,可以避免传统图片因为缩放而产生失真.VectorCompat组件是 ...
- Vue常用模块
1.npm install Vue-Awesome-Swiper@v2.6.7 --save 实现轮播图 2.npm install axios 发送请求get,post
- JDK 1.8 新特性
default 函数式接口 待总结
- Markdown使用简介 及 学习资源整理
Markdown资源整理 官网 http://daringfireball.net/projects/markdown/ http://jgm.github.io/stmd/spec.html htt ...
- ES6 迭代器和生成器
设计为了更高效的数据处理,避免过多for循环嵌套(代码复杂度,跟踪多个循环变量) 1. 迭代器: 为迭代过程设计的接口 所有的迭代器对象都有next()方法,每次调用都返回一个结果对象,对象有两个属性 ...