格网DEM生成不规则三角网TIN
概述
在GIS(地理信息科学)中,地形有两种表达方式,一种是格网DEM,一种是不规则三角网TIN。一般情况下规则格网DEM用的比较多,因为可以将高程当作像素,将其存储为图片类型的数据(例如.tif)。但是规则格网存储的数据量大,按规则取点,并不能最大程度的保证地形特征,所以很多情况下需要将其表达为不规则三角网,也就是TIN。
详论
1️⃣数据准备
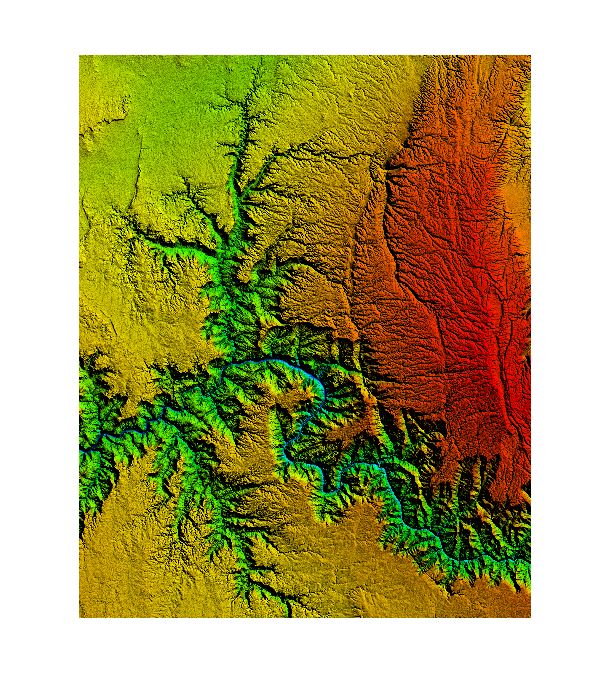
下载SRTM30的DEM数据,找到美国大峡谷附近的地形,通过UTM投影,将其转换成30米的平面坐标的DEM(.tif格式)。通过Global Mapper打开,显示的效果如下:
2️⃣转换算法
格网DEM本身也可以看作是一个三角网,每个方格由两个三角形组成,N个方格据组成了一个地形格网。所以在参考文献一中提到了一种保留重要点法,将格网DEM中认为不重要的点去除掉,剩下的点构建成不规则三角网即可。那么怎么直到有的点重要,有的点不重要呢?参考文献一中提到了一种约束:
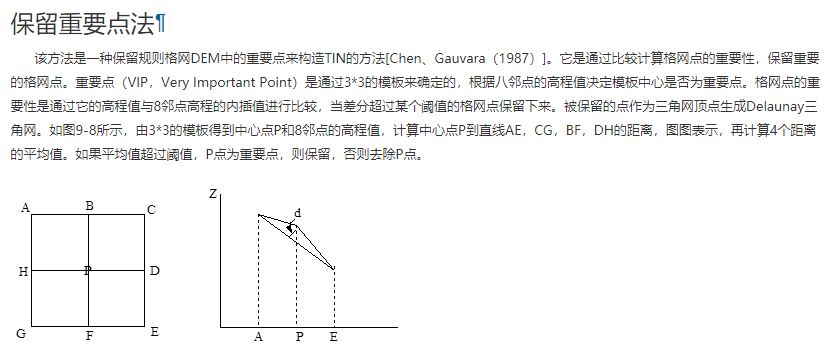
可以看到这类似于图像处理中的滤波操作,通过比较每个高程点与周围的平均高差,如果大于一个阈值,则为重要点,否则为不重要点。其中的关键点就是求空间点与直线的距离,具体算法可参看这篇文章《空间点与直线距离算法》。
3️⃣TIN构建
经过保留重要点法过滤之后,剩下的点就要进行构网了。一般来说最好构建成Delaunay三角网(因为Delaunay三角网具有很多最优特性)。Delaunay三角网的构建算法也挺复杂,不过可以通过计算几何算法库CGAL来构建。
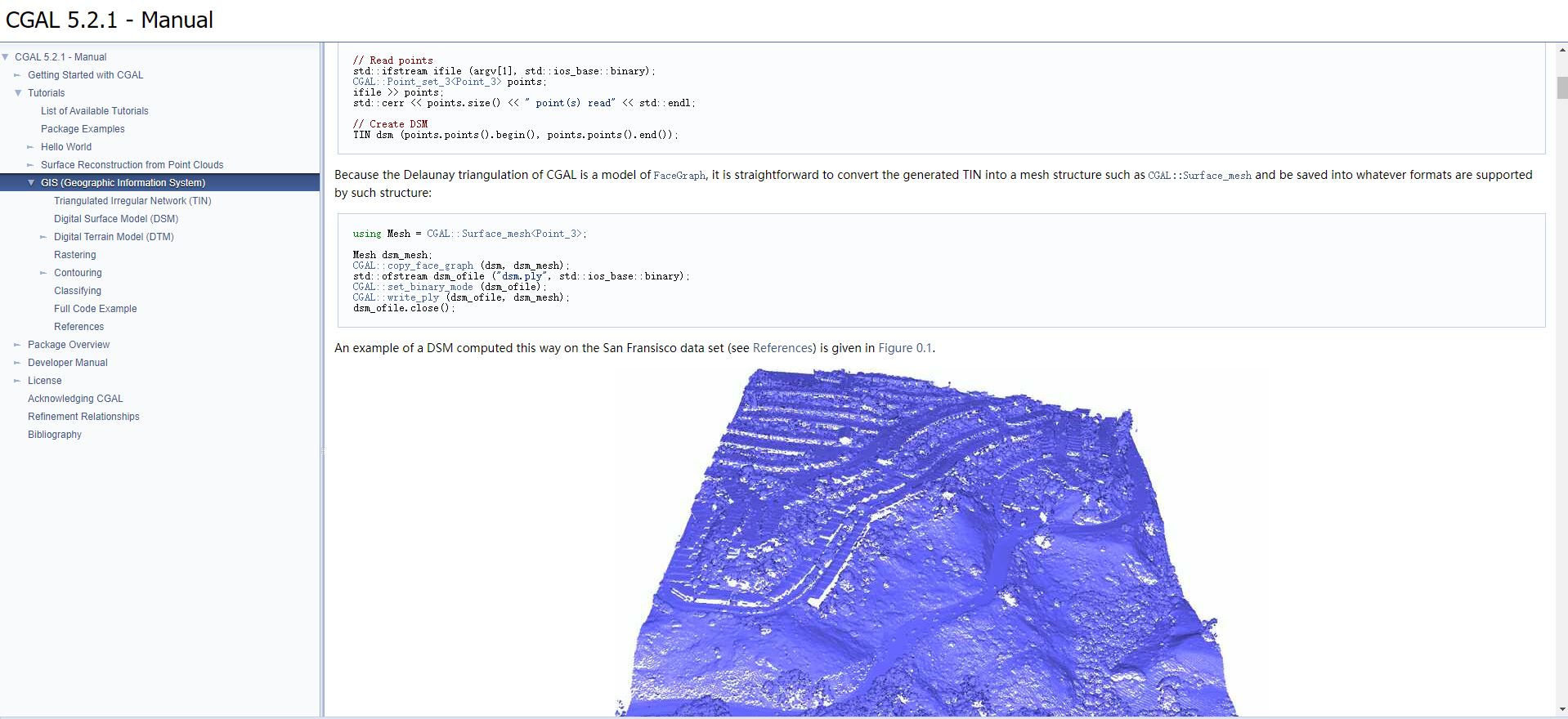
查阅CGAL的文档,发现CGAL居然已经有了GIS专题,里面有许多与地形处理相关的示例。其中一个示例就是通过点集生成了Delaunay三角网,并且生成了.ply文件。.ply文件正好是一种三维数据格式,能够被很多三维软件打开。
4️⃣具体实现
解决了两个关键算法,具体实现就很简单了:引入GDAL数据来处理地形数据(.tif),遍历每个像素点(高程点)做滤波操作,通过CGAL来构建TIN:
#include <iostream>
#include <string>
#include <Vec3.hpp>
#include <threeCGAL.h>
#include <gdal_priv.h>
#include <CGAL/Exact_predicates_inexact_constructions_kernel.h>
#include <CGAL/Projection_traits_xy_3.h>
#include <CGAL/Delaunay_triangulation_2.h>
#include <CGAL/Triangulation_vertex_base_with_info_2.h>
#include <CGAL/Triangulation_face_base_with_info_2.h>
#include <CGAL/boost/graph/graph_traits_Delaunay_triangulation_2.h>
#include <CGAL/boost/graph/copy_face_graph.h>
#include <CGAL/Point_set_3.h>
#include <CGAL/Surface_mesh.h>
#include <CGAL/Polygon_mesh_processing/border.h>
#include <CGAL/Polygon_mesh_processing/remesh.h>
using Kernel = CGAL::Exact_predicates_inexact_constructions_kernel;
using Projection_traits = CGAL::Projection_traits_xy_3<Kernel>;
using Point_2 = Kernel::Point_2;
using Point_3 = Kernel::Point_3;
using Segment_3 = Kernel::Segment_3;
// Triangulated Irregular Network
using TIN = CGAL::Delaunay_triangulation_2<Projection_traits>;
using namespace std;
int main(int argc, char *argv[])
{
GDALAllRegister();
string demPath = "D:/Work/DEM2TIN/DEM.tif";
string tinPath = "D:/Work/DEM2TIN/Tin.ply";
GDALDataset* img = (GDALDataset *)GDALOpen(demPath.c_str(), GA_ReadOnly);
if (!img)
{
cout << "Can't Open Image!" << endl;
return 1;
}
int imgWidth = img->GetRasterXSize(); //图像宽度
int imgHeight = img->GetRasterYSize(); //图像高度
int bandNum = img->GetRasterCount(); //波段数
//int depth = GDALGetDataTypeSize(img->GetRasterBand(1)->GetRasterDataType()) / 8; //图像深度
int depth = sizeof(float); //图像深度
double padfTransform[6];
img->GetGeoTransform(padfTransform);
double dx = padfTransform[1];
double startx = padfTransform[0] + 0.5 * dx;
double dy = -padfTransform[5];
double starty = padfTransform[3] - imgHeight * dy + 0.5 * dy;
//申请buf
int bufWidth = imgWidth;
int bufHeight = imgHeight;
size_t imgBufNum = (size_t)bufWidth * bufHeight * bandNum;
size_t imgBufOffset = (size_t)bufWidth * (bufHeight - 1) * bandNum;
float *pblock = new float[imgBufNum];
//读取
img->RasterIO(GF_Read, 0, 0, bufWidth, bufHeight, pblock + imgBufOffset, bufWidth, bufHeight,
GDT_Float32, bandNum, nullptr, bandNum*depth, -bufWidth * bandNum*depth, depth);
CGAL::Point_set_3<Point_3> points;
double zThreshold = 5;
//
for (int yi = 0; yi < imgHeight; yi++)
{
for (int xi = 0; xi < imgWidth; xi++)
{
//将四个角点的约束加入,保证与DEM范围一致
if ((xi == 0 && yi == 0) || (xi == imgWidth - 1 && yi == 0) ||
(xi == imgWidth - 1 && yi == imgHeight - 1) || (xi == 0 && yi == imgHeight - 1))
{
double gx1 = startx + dx * xi;
double gy1 = starty + dy * yi;
size_t m11 = (size_t)(imgWidth)* yi + xi;
tinyCG::Vec3d P(gx1, gy1, pblock[m11]);
points.insert(Point_3(P.x(), P.y(), P.z()));
}
else
{
double gx0 = startx + dx * (xi - 1);
double gy0 = starty + dy * (yi - 1);
double gx1 = startx + dx * xi;
double gy1 = starty + dy * yi;
double gx2 = startx + dx * (xi + 1);
double gy2 = starty + dy * (yi + 1);
size_t m00 = (size_t)imgWidth * (yi - 1) + xi - 1;
size_t m01 = (size_t)imgWidth * (yi - 1) + xi;
size_t m02 = (size_t)imgWidth * (yi - 1) + xi + 1;
size_t m10 = (size_t)imgWidth* yi + xi - 1;
size_t m11 = (size_t)imgWidth* yi + xi;
size_t m12 = (size_t)imgWidth* yi + xi + 1;
size_t m20 = (size_t)imgWidth * (yi + 1) + xi - 1;
size_t m21 = (size_t)imgWidth * (yi + 1) + xi;
size_t m22 = (size_t)imgWidth * (yi + 1) + xi + 1;
tinyCG::Vec3d P(gx1, gy1, pblock[m11]);
double zMeanDistance = 0;
int counter = 0;
if(m00 < imgBufNum && m22 < imgBufNum)
{
tinyCG::Vec3d A(gx0, gy0, pblock[m00]);
tinyCG::Vec3d E(gx2, gy2, pblock[m22]);
zMeanDistance = zMeanDistance + tinyCG::threeCGAL::CalDistancePointAndLine(P, A, E);
counter++;
}
if (m02 < imgBufNum && m20 < imgBufNum)
{
tinyCG::Vec3d C(gx2, gy0, pblock[m02]);
tinyCG::Vec3d G(gx0, gy2, pblock[m20]);
zMeanDistance = zMeanDistance + tinyCG::threeCGAL::CalDistancePointAndLine(P, C, G);
counter++;
}
if (m01 < imgBufNum && m21 < imgBufNum)
{
tinyCG::Vec3d B(gx1, gy0, pblock[m01]);
tinyCG::Vec3d F(gx1, gy2, pblock[m21]);
zMeanDistance = zMeanDistance + tinyCG::threeCGAL::CalDistancePointAndLine(P, B, F);
counter++;
}
if (m12 < imgBufNum && m10 < imgBufNum)
{
tinyCG::Vec3d D(gx2, gy1, pblock[m12]);
tinyCG::Vec3d H(gx0, gy1, pblock[m10]);
zMeanDistance = zMeanDistance + tinyCG::threeCGAL::CalDistancePointAndLine(P, D, H);
counter++;
}
zMeanDistance = zMeanDistance / counter;
if (zMeanDistance > zThreshold)
{
points.insert(Point_3(P.x(), P.y(), P.z()));
}
}
}
}
delete[] pblock;
pblock = nullptr;
GDALClose(img);
// Create DSM
TIN dsm (points.points().begin(), points.points().end());
using Mesh = CGAL::Surface_mesh<Point_3>;
Mesh dsm_mesh;
CGAL::copy_face_graph (dsm, dsm_mesh);
std::ofstream dsm_ofile (tinPath, std::ios_base::binary);
CGAL::set_binary_mode (dsm_ofile);
CGAL::write_ply (dsm_ofile, dsm_mesh);
dsm_ofile.close();
return 0;
}
5️⃣实验结果
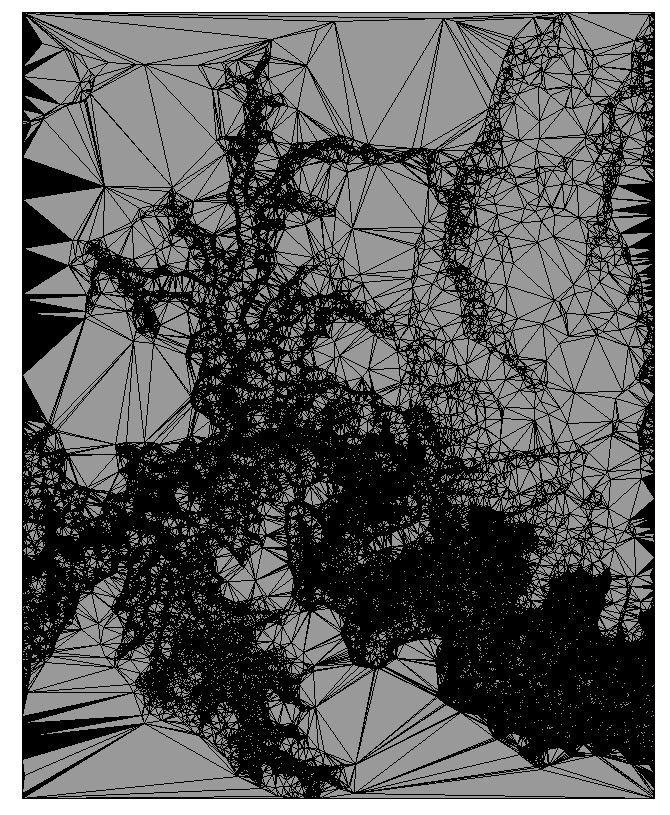
将最终生成的三维模型文件.ply通过MeshLab打开,渲染效果如下:
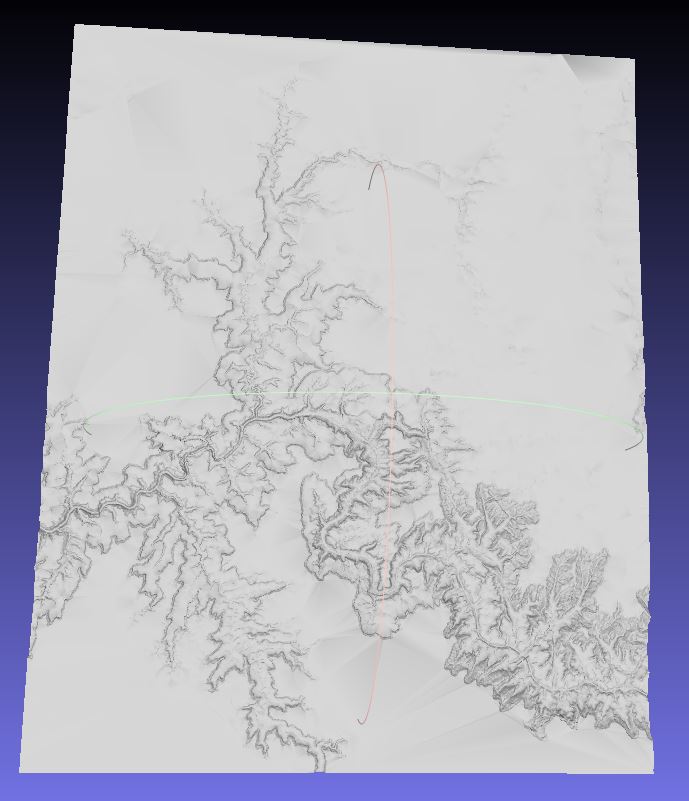
通过Global Mapper还可以看到具体的三角构网效果:
参考
格网DEM生成不规则三角网TIN的更多相关文章
- 不规则三角网(TIN)(转)
来自:http://blog.csdn.net/kikitamoon/article/details/8217641 Ⅰ 数字高程模型(DEM) 地球表面高低起伏,呈现一种连续变化的曲面,这种曲面无法 ...
- Arcgis CreateFishnet工具,生成到FileGDB中要素类的格网大小不一致
我的第一篇博客!哈哈 最近在做一些关于创建渔网的工作,发现一些问题,做个总结. 1.问题描述:如图1,设置好渔网的必要参数,输出目录为gdb里的矢量图层,(行列数比较大,渔网的地理范围较小),输出的格 ...
- 基于gdal的格网插值
格网插值就是使用离散的数据点创建一个栅格图像的过程.通常情况下,有一系列研究区域的离散点,如果我们想将这些点转换为规则的网格数据来进行进一步的处理,或者和其他网格数据进行合并 等处理,就需要使用格网插 ...
- WorldWind源码剖析系列:经纬度格网类LatLongGrid
经纬度格网类LatLongGrid继承自可渲染对象类RenderableObject,是WorldWind中用来在星球外表绘制经纬度格网的封装类.其类图如下所示. 绘制经纬网格的主体函数为Render ...
- [ArcGIS]高程地图-把DEM栅格数据(.tif)转换为TIN矢量数据,并储存TIN数据。
把DEM数据(.tif)获得栅格数据对应的经纬度及高程信息,存到地理数据库 一.预处理工作 栅格数据的合并--目的:将原始4张Dem(.tif)数据合并为一张Dem(.tif) https://wen ...
- 简单的python格网算法算数据密集度demo
# 格网算法计算数据集区域数据密集度 import time import random import numpy as np import pandas as pd # 模拟数据集 def crea ...
- BootStrap入门教程 (一) :手脚架Scaffolding(全局样式(Global Style),格网系统(Grid System),流式格网(Fluid grid System),自定义(Customing),布局(Layouts))
2011年,twitter的“一小撮”工程师为了提高他们内部的分析和管理能力,用业余时间为他们的产品构建了一套易用.优雅.灵活.可扩展的前端工具集--BootStrap.Bootstrap由MARK ...
- GIS可视化——热点格网图
一.简介 原理:按照格网大小将区域进行划分,由一个矩形格网替代当前范围内的数据,由格网中心数字代替格网的权重(可以为格网中数据的数量,数据某权重的平均值.最大值.最小值等), 由格网之间颜色的不同表达 ...
- 不规则三角网 Delaunay——TIN
http://blog.csdn.net/u010025211/article/details/25032209 知识点一:平面中判断一个点是否在三角形内部. #include <stdio.h ...
- javascript生成表格增删改查 JavaScript动态改变表格单元格内容 动态生成表格 JS获取表格任意单元格 javascript如何动态删除表格某一行
jsp页面表格布局Html代码 <body onload="show()"> <center> <input type="text" ...
随机推荐
- jdk-14.0.1环境搭建及cmd环境编译执行
1.安装包获取 https://www.oracle.com/java/technologies/javase/jdk14-archive-downloads.html 2.环境变量配置 最新版本的J ...
- python3 gui 计时器
# -*- coding: utf-8 -*- # @Time : 2023/4/4 21:53 # @File : 定时器gui.py # @Software: PyCharm Community ...
- java算法之排序算法大全
①排序 所谓排序,就是使一串记录,按照其中的某个或某些关键字的大小,递增或递减的排列起来的操作.排序算法,就是如何使得记录按照要求排列的方法.排序算法在很多领域得到相当地重视,尤其是在大量数据的处理方 ...
- P8684 [蓝桥杯 2019 省 B] 灵能传输 题解
P8684 [蓝桥杯 2019 省 B] 灵能传输 题解 Part 1 提示 题目传送门 欢迎大家指出错误并私信这个蒟蒻 欢迎大家在下方评论区写出自己的疑问(记得 @ 这个蒟蒻) Part 2 更新日 ...
- 初探富文本之React实时预览
初探富文本之React实时预览 在前文中我们探讨了很多关于富文本引擎和协同的能力,在本文中我们更偏向具体的应用组件实现.在一些场景中比如组件库的文档编写时,我们希望能够有实时预览的能力,也就是用户可以 ...
- RLChina2022公开课-博弈论
纯博弈: 单纯的动机组合,离散的集合 混合博弈: 加入了概率论,以百分比的概率执行不同的的动机.,概率分布 零和博弈.合作博弈.协同博弈 扩展博弈和非完美信息 扩展博弈.贝叶斯博弈 纳什均衡 任何一位 ...
- 创造力的起源《The Origins of Creativity》
接近创造力 创造力是对原创的追求,其动力是人类对于新奇事物的钟爱. 了解创造力需要三个层次的思考. 1.What(如何定义这种现象) 2.Question(发问,他是如何出现的,导致其出现的最初原因是 ...
- 使用 PPO 算法进行 RLHF 的 N 步实现细节
当下,RLHF/ChatGPT 已经变成了一个非常流行的话题.我们正在致力于更多有关 RLHF 的研究,这篇博客尝试复现 OpenAI 在 2019 年开源的原始 RLHF 代码库,其仓库位置位于 o ...
- 快速上手Prompt,让你的LLMs更智能
前言 在当前社会中,随着AIGC的盛行,使用好prompt可以让自己更上一层楼.今天,我将通过星火大模型重新认识prompt设计,并与大家分享一些使用技巧. 如果你想体验星火大模型的强大魅力,请登录h ...
- ABAP 标准程序选择屏增强 文本显示异常问题处理 MB52 示例 INITIALIZATION. "变量参数:%_ + 屏幕选择字段变量 + _%_APP_%-TEXT %_SSKH_%_APP_%-TEXT = '所属客户'.
数据筛选 文本 INITIALIZATION. "变量参数:%_ + 屏幕选择字段变量 + _%_APP_%-TEXT %_SSKH_%_APP_%-TEXT = '所属客户'.