PCL智能指针疑云 <二> 使用同一智能指针作为PCL预处理API的输入和输出
问题介绍:
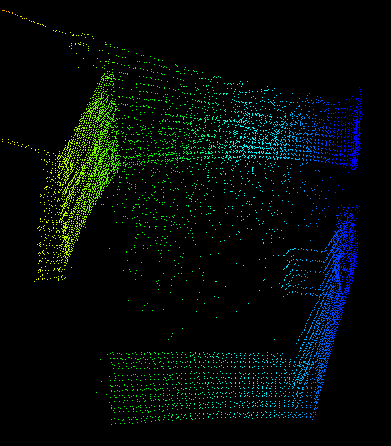
slam构建地图,先进行降采样,再进行可视化或存储。然而经过降采样后,代码没有报错的情况下,点云数据散成一团。将代码和点云数据展示如下,
pcl::VoxelGrid<Lidar::PointType> voxel_filter;
voxel_filter.setLeafSize(0.02, 0.02, 0.02); Lidar::PointCloudPtr mapPointCloud(new Lidar::PointCloudType); //滤波器输入变量
//...
//往输入变量中填充数据
//... voxel_filter.setInputCloud(mapPointCloud);
voxel_filter.filter(*mapPointCloud);
std::cout << "after voxel_filter, mapPointCloud size : " << mapPointCloud->points.size() << std::endl;
std::string index = std::to_string(ndtCount);
pcl::io::savePCDFileASCII ("/home/gordon/fase_ws/src/ddd_wall_mapping/filter_map_"+index+".pcd",
*mapPointCloud);
问题分析:
猜想是由于降采样滤波器的输入和输出是同一个指针变量,在处理过程中内存混乱,导致点云数据出错。
解决方案:
使用两个不同的变量作为降采样滤波器的输入和输出,并且作为输出的变量每次都要进行清空操作。
问题解决后的代码和点云数据展示如下,
pcl::VoxelGrid<Lidar::PointType> voxel_filter;
voxel_filter.setLeafSize(0.02, 0.02, 0.02); Lidar::PointCloudPtr mapPointCloud(new Lidar::PointCloudType); //滤波器输入变量
//...
//往输入变量中填充数据
//... Lidar::PointCloudPtr filter_mapPointCloud(new Lidar::PointCloudType); // 滤波器输出变量
voxel_filter.setInputCloud(mapPointCloud);
voxel_filter.filter(*filter_mapPointCloud);
mapPointCloud->clear();
*mapPointCloud += *filter_mapPointCloud;
std::cout << "after voxel_filter, mapPointCloud size : " << mapPointCloud->points.size() << std::endl;
std::string index = std::to_string(ndtCount);
pcl::io::savePCDFileASCII ("/home/gordon/fase_ws/src/ddd_wall_mapping/filter_map_"+index+".pcd", *mapPointCloud);

至于具体原因,至今不详,忘高手或前辈指点迷津。
PCL智能指针疑云 <二> 使用同一智能指针作为PCL预处理API的输入和输出的更多相关文章
- 20130330 printf数组改变 数组指针便利二维数组 二级指针遍历二维数组 ZigZag
1.为什么printf之后数组的值会改变? #include<stdio.h> ; int * Zigzag() { ,j=,limit=; ; ; int a[N][N]; int (* ...
- 唠唠C++二级指针、二维数组、指针数组、数组指针等的区分
今天看c++primer第六章,有这部分的内容,脑子有点糊涂了,看了几篇博客,自己敲了下,记录一下备忘. 二级指针: int **p; 二维数组: int p[10][10]; char q[10][ ...
- c++智能指针《二》 std::tr1::shared_ptr
转载http://www.cnblogs.com/kadinzhu/archive/2011/12/12/2284826.html 看<effective c++>,作者一直强调用std: ...
- Rust 智能指针(二)
1. Rc<T> 引用计数指针 Rc<T> 是引用计数指针,可以使用clone使得指针所指向的数据具有多个所有者. enum List { Cons(i32, Rc<Li ...
- Android系统智能指针的设计思路(轻量级指针、强指针、弱指针)
本博客为原创,转载请注明出处,谢谢. 参考博文:Android系统的智能指针(轻量级指针.强指针和弱指针)的实现原理分析 C++中最容易出错的地方莫过于指针了,指针问题主要有两类,一是内存泄露,二是无 ...
- UI标签库专题二:JEECG智能开发平台Column(列) 子标签
UI标签库专题二:JEECG智能开发平台Column(列) 子标签 1.1. Column(列) 子标签 1.1.1. 演示样例 <t:dgCol title="年龄" ...
- 智能反射表面(可重构智能表面)Large Intelligent surface 最新综述整理
闻道洛阳花正好,家家遮户春风.道人饮处百壶空.年年花下醉,看尽几番红. 此拐又从何处去,飘蓬一任西东.语声虽异笑声同.一轮清夜月,何处不相逢. ---- 临江仙·与刘拐 更多精彩内容请关注微信公众号 ...
- C语言教学--二维数组和指针的理解
对于初学者对二维数组和指针的理解很模糊, 或者感觉很难理解, 其实我们和生活联系起来, 这一切都会变得清晰透彻. 我们用理解一维数组的思想来理解二维数组, 对于一维数组,每个箱子里存放的是具体的苹果, ...
- 关于c语言二维数组与指针的个人理解及处理办法。
相信大家在学习C语言时,对一维数组和指针的理解应该是自信的,但是,我在学习过程中,看到网上一些博文,发现即便是参加工作的一些专业编程人员,突然碰到二维数组和指针的问题时,也可能会遇到难以处理的诡异问题 ...
随机推荐
- elasticsearch-analysis-ik windows 环境 IK 中文分词器 的 下载 和 安装
1,下载插件压缩包(本地测试建议用迅雷下,生产用的绝对不要用迅雷下),链接地址:https://github.com/medcl/elasticsearch-analysis-ik/releases/ ...
- C语言Ⅰ作业12—学期总结
一.我学到的内容 二.我的收获 作业链接 收获 C语言Ⅰ博客作业01 认识了PTA编程,博客园,Markdown基本语法1,Markdown基本语法2 C语言Ⅰ博客作业02 PTA系统常见问题解答 C ...
- 洛谷 P2796 Facer的程序 题解
题面 一个树形DP, f[i]=表示以i为根可以得到的子树个数: 则f[i]*=(f[j]+1): 初始化f[i]=1; ans=sigma(f[i]); #include <bits/stdc ...
- noip2013day2-华容道
题目描述 小 \(B\) 最近迷上了华容道,可是他总是要花很长的时间才能完成一次.于是,他想到用 编程来完成华容道:给定一种局面,华容道是否根本就无法完成,如果能完成,最少需要多 少时间. 小 \(B ...
- 使用Tomcat、JNDI与ActiveMQ实现JMS消息通信服务
前言 之所以使用JNDI 是出于通用性考虑,该例子使用JMS规范提供的通用接口,没有使用具体JMS提供者的接口,这样可以保证我们编写的程序适用于任何一种JMS实现(ActiveMQ.HornetQ等) ...
- 关于js计算非等宽字体宽度的方法
准备一个容器 首先在body外插入一个absolute的容器避免重绘: const svgWidthTestContainer = document.createElement('svg'); svg ...
- 《一头扎进》系列之Python+Selenium自动化测试框架实战篇6 - 价值好几K的框架,呦!这个框架还真牛叉哦!!!
1. 简介 本文开始介绍如何通过unittest来管理和执行测试用例,这一篇主要是介绍unittest下addTest()方法来加载测试用例到测试套件中去.用addTest()方法来加载我们测试用例到 ...
- MySQL数据库入门常用基础命令
MySQL数据库入门———常用基础命令 数据——公司的生命线,因此在大多数的互联网公司,都在使用开源的数据库产品,MySQL也因此关注度与使用率非常的高,所以做为运维的屌丝们,掌握它的一些基 ...
- __main__ 变量
1. 摘要 通俗的理解__name__ == '__main__':假如你叫小明.py,在朋友眼中,你是小明(__name__ == '小明'):在你自己眼中,你是你自己(__name__ == '_ ...
- myql命令行乱码问题,以及设置数据库编码
使用命令修改数据库编码格式参见:https://www.cnblogs.com/clsn/p/8047028.html#auto_id_3 命令行乱码设置修改参见:https://www.cnblog ...