深入理解dijkstra+堆优化
深入理解dijkstra+堆优化
其实就这几种代码几种结构,记住了完全就可以举一反三,所以多记多练多优化多思考。
对于一个有向图或无向图,所有边权为正(边用邻接矩阵的形式给出),给定a和b,求a到b的最短路,保证a一定能够到达b。这条最短路是否一定存在呢?答案是肯定的。相反,最长路就不一定了,由于边权为正,如果遇到有环的时候,可以一直在这个环上走,因为要找最长的,这样就使得路径越变越长,永无止境,所以对于正权图,在可达的情况下最短路一定存在,最长路则不一定存在。这里先讨论正权图的最短路问题。
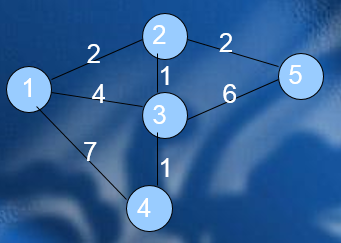
输入:
5 7
1 2 2
2 5 2
1 3 4
1 4 7
3 4 1
2 3 1
3 5 6
#include <bits/stdc++.h>
using namespace std;
int n,m;
struct node{
int to;
int w;
};
int edgeNum[];
vector<node> vec[];
int dis[];
bool vis[]; void addEdge(int a,int b,int w){
edgeNum[a]++;
node *p=new node();
p->to=b;
p->w=w;
vec[a].push_back(*p);
} void init(){
cin>>n>>m;
for(int i=;i<=m;i++){
int a,b,w;
cin>>a>>b>>w;
addEdge(a,b,w);
addEdge(b,a,w);
}
} void dijkstra(int start){
memset(dis,0x3f,sizeof(dis));
dis[start]=;
for(int i=;i<edgeNum[start];i++) {
int b=vec[start][i].to;
int w=vec[start][i].w;
dis[b]=w;
}
vis[start]=;
for(int k=;k<=n-;k++){
int minV=0x7fffffff,min_i;
for(int i=;i<=n;i++){
if(!vis[i]&&dis[i]<minV){
minV=dis[i];
min_i=i;
}
}
vis[min_i]=true;
for(int i=;i<edgeNum[min_i];i++){
int b=vec[min_i][i].to;
int w=vec[min_i][i].w;
if(!vis[b]&&dis[b]>dis[min_i]+w){
dis[b]=dis[min_i]+w;
}
} } } void print(){
for(int i=;i<=n;i++)
cout<<dis[i]<<" ";
cout<<endl;
} int main(){
freopen("in.txt","r",stdin);
init();
dijkstra();
print();
return ;
}
上面的代码说几点:
1、13行到19行的代码可以通过给结构体添加构造函数来优化。
2、dijkstra中的节点如果改成u,v的话更清晰
3、朴素的dijkstra分为如下几步:初始化dis数组,n-1轮(找最优节点,更新)
求节点1到其它节点的距离:
堆优化:
#include <bits/stdc++.h>
using namespace std;
int n,m;
struct node{
int to;
int w;
};
int edgeNum[];
vector<node> vec[];
int dis[];
bool vis[]; void addEdge(int a,int b,int w){
edgeNum[a]++;
node *p=new node();
p->to=b;
p->w=w;
vec[a].push_back(*p);
} void init(){
cin>>n>>m;
for(int i=;i<=m;i++){
int a,b,w;
cin>>a>>b>>w;
addEdge(a,b,w);
addEdge(b,a,w);
}
} void dijkstra(int start){
memset(dis,0x3f,sizeof(dis));
dis[start]=;
for(int i=;i<edgeNum[start];i++) {
int b=vec[start][i].to;
int w=vec[start][i].w;
dis[b]=w;
}
vis[start]=;
for(int k=;k<=n-;k++){
int minV=0x7fffffff,min_i;
for(int i=;i<=n;i++){
if(!vis[i]&&dis[i]<minV){
minV=dis[i];
min_i=i;
}
}
vis[min_i]=true;
for(int i=;i<edgeNum[min_i];i++){
int b=vec[min_i][i].to;
int w=vec[min_i][i].w;
if(!vis[b]&&dis[b]>dis[min_i]+w){
dis[b]=dis[min_i]+w;
}
} }
} //dijkstra的堆优化
struct qnode{
int i_i;
int dis_i;
qnode(int i,int dis_i){
this->i_i=i;
this->dis_i=dis_i;
}
};
struct myCmp{
bool operator ()(const qnode &p1,const qnode &p2){
return p1.dis_i>p2.dis_i;
}
};
priority_queue<qnode,vector<qnode>,myCmp> q;
void dijkstra_2(int start){
memset(dis,0x3f,sizeof(dis));//和SPFA一样,这里最开始全都是无穷大
dis[start]=;
q.push(qnode(start,dis[start]));
while(!q.empty()){
qnode p=q.top();
q.pop();
int min_i= p.i_i;
int minV=p.dis_i;
if(vis[min_i]) continue;
vis[min_i]=true;
for(int i=;i<edgeNum[min_i];i++){
int b=vec[min_i][i].to;
int w=vec[min_i][i].w;
if(!vis[b]&&dis[b]>dis[min_i]+w){
dis[b]=dis[min_i]+w;
q.push(qnode(b,dis[b]));
}
} }
} void print(){
for(int i=;i<=n;i++)
cout<<dis[i]<<" ";
cout<<endl;
} int main(){
freopen("in.txt","r",stdin);
init();
//dijkstra(2);
dijkstra_2();
print();
return ;
}
关于上面的代码说几点:
1、堆优化的话priority_queue得非常熟悉
2、这里堆优化的时候使用了结构体,里面的成员是i和dis[i],其实这个dis[i]可以直接写在外面,但是比较规则还是得自己定义
3、用队列做的所有的题核心代码一定是while(!queue.empty()){}
4、还是要多写多练,要熟悉,基础打好
5、和SPFA一样,如果点更新成功就加进队列
求节点1到其它节点的距离:
堆优化2
#include <bits/stdc++.h>
using namespace std;
int n,m;
struct node{
int to;
int w;
};
int edgeNum[];
vector<node> vec[];
int dis[];
bool vis[]; void addEdge(int a,int b,int w){
edgeNum[a]++;
node *p=new node();
p->to=b;
p->w=w;
vec[a].push_back(*p);
} void init(){
cin>>n>>m;
for(int i=;i<=m;i++){
int a,b,w;
cin>>a>>b>>w;
addEdge(a,b,w);
addEdge(b,a,w);
}
} void dijkstra(int start){
memset(dis,0x3f,sizeof(dis));
dis[start]=;
for(int i=;i<edgeNum[start];i++) {
int b=vec[start][i].to;
int w=vec[start][i].w;
dis[b]=w;
}
vis[start]=;
for(int k=;k<=n-;k++){
int minV=0x7fffffff,min_i;
for(int i=;i<=n;i++){
if(!vis[i]&&dis[i]<minV){
minV=dis[i];
min_i=i;
}
}
vis[min_i]=true;
for(int i=;i<edgeNum[min_i];i++){
int b=vec[min_i][i].to;
int w=vec[min_i][i].w;
if(!vis[b]&&dis[b]>dis[min_i]+w){
dis[b]=dis[min_i]+w;
}
} }
} //dijkstra的堆优化
struct myCmp{
bool operator ()(int a,int b){
return dis[a]>dis[b];
}
};
priority_queue<int,vector<int>,myCmp> q;
void dijkstra_2(int start){
memset(dis,0x3f,sizeof(dis));//和SPFA一样,这里最开始全都是无穷大
dis[start]=;
q.push(start);
while(!q.empty()){
int u=q.top();
q.pop();
if(vis[u]) continue;
vis[u]=true;
for(int i=;i<edgeNum[u];i++){
int b=vec[u][i].to;
int w=vec[u][i].w;
if(!vis[b]&&dis[b]>dis[u]+w){
dis[b]=dis[u]+w;
q.push(b);
}
} }
} void print(){
for(int i=;i<=n;i++)
cout<<dis[i]<<" ";
cout<<endl;
} int main(){
freopen("in.txt","r",stdin);
init();
//dijkstra(2);
dijkstra_2();
print();
return ;
}
堆优化2
关于上面的代码说几点:
1、dijkstra的优先队列优化写法和spfa非常像,只不过spfa多加了一个是否在队列里面的标志
2、这里储存图用的是vector数组
3、优先队列里面的元素是int,然而我们还是重写了优先队列的比较函数,因为队列里面是节点编号,但是我们要比较的是dis[i]
4、和SPFA一样,dis[i]最开始全都是无穷大 ,并且最开始只更新dis[start]=0
求节点1到其它节点的距离:
其它代码:
#include<iostream>
#include<cstdio>
#include<queue>
using namespace std;
int n,m,S,tot,Next[],head[],tree[],val[];
bool visit[];
long long dis[];
struct cmp
{
bool operator()(int a,int b)
{
return dis[a]>dis[b];
}
};
priority_queue<int,vector<int>,cmp> Q;
void add(int x,int y,int z)
{
tot++;
Next[tot]=head[x];
head[x]=tot;
tree[tot]=y;
val[tot]=z;
}
int main()
{
scanf("%d%d%d",&n,&m,&S);
tot=;
for (int i=;i<=m;i++)
{
int x,y,z;
scanf("%d%d%d",&x,&y,&z);
if (x==y) continue;
add(x,y,z);
}
for (int i=;i<=n;i++)
{
visit[i]=false;
dis[i]=;
}
Q.push(S);
dis[S]=;
while (!Q.empty())
{
int u=Q.top();
Q.pop();
if (visit[u]) continue;
visit[u]=true;
for (int i=head[u];i;i=Next[i])
{
int v=tree[i];
if (!visit[v]&&dis[v]>dis[u]+(long long)val[i])
{
dis[v]=dis[u]+val[i];
Q.push(v);
}
}
}
for (int i=;i<=n-;i++) printf("%lld ",dis[i]);
printf("%lld\n",dis[n]);
return ;
}
vector数组版
#include <bits/stdc++.h>
using namespace std;
struct node{
int v;
int w;
node(int v,int w){
this->v=v;
this->w=w;
}
};
vector<node> vec[];
int edgeNum[];
int n,m;
int dis[];
bool vis[]; void addEdge(int u,int v,int w){
edgeNum[u]++;
vec[u].push_back(node(v,w));
} void init(){
cin>>n>>m;
for(int i=;i<=m;i++){
int u,v,w;
cin>>u>>v>>w;
addEdge(u,v,w);
addEdge(v,u,w);
}
} struct myCmp{
bool operator ()(const int &u,const int &v){
return dis[u]>dis[v];
}
};
priority_queue<int,vector<int>,myCmp> q;
void dijkstra(int start){
memset(dis,0x3f,sizeof(dis));
q.push(start);
dis[start]=;
while(!q.empty()){
int u=q.top();
q.pop();
if(vis[u]) continue;
vis[u]=true;
for(int i=;i<edgeNum[u];i++){
int v=vec[u][i].v;
int w=vec[u][i].w;
if(!vis[v]&&dis[v]>dis[u]+w){
dis[v]=dis[u]+w;
q.push(v);
}
}
}
} void print(){
for(int i=;i<=n;i++){
cout<<dis[i]<<" ";
}
cout<<endl;
} int main(){
freopen("in.txt","r",stdin);
init();
dijkstra();
print();
return ;
}
深入理解dijkstra+堆优化的更多相关文章
- POJ 2502 - Subway Dijkstra堆优化试水
做这道题的动机就是想练习一下堆的应用,顺便补一下好久没看的图论算法. Dijkstra算法概述 //从0出发的单源最短路 dis[][] = {INF} ReadMap(dis); for i = 0 ...
- Bzoj 2834: 回家的路 dijkstra,堆优化,分层图,最短路
2834: 回家的路 Time Limit: 10 Sec Memory Limit: 128 MBSubmit: 62 Solved: 38[Submit][Status][Discuss] D ...
- POJ2387(dijkstra堆优化)
Til the Cows Come Home Bessie is out in the field and wants to get back to the barn to get as much s ...
- hdu 2544 单源最短路问题 dijkstra+堆优化模板
最短路 Time Limit: 5000/1000 MS (Java/Others) Memory Limit: 32768/32768 K (Java/Others) Total Submis ...
- dijkstra堆优化(multiset实现->大大减小代码量)
例题: Time Limit: 1 second Memory Limit: 128 MB [问题描述] 在电视时代,没有多少人观看戏剧表演.Malidinesia古董喜剧演员意识到这一事实,他们想宣 ...
- POJ 1511 - Invitation Cards 邻接表 Dijkstra堆优化
昨天的题太水了,堆优化跑的不爽,今天换了一个题,1000000个点,1000000条边= = 试一试邻接表 写的过程中遇到了一些问题,由于习惯于把数据结构封装在 struct 里,结果 int [10 ...
- Dijkstra堆优化学习
最短路径例题 今天特地学习了Dijkstra的堆优化(主要是慕名已久). 我们需要一个堆来记录[编号,到编号这个点的最短路径值(当然只是当前的)] 与原来的Dijkstra操作基本一致,主要有以下几点 ...
- 【Dijkstra堆优化】洛谷P2243电路维修
题目背景 Elf 是来自Gliese 星球的少女,由于偶然的原因漂流到了地球上.在她无依无靠的时候,善良的运输队员Mark 和James 收留了她.Elf 很感谢Mark和James,可是一直也没能给 ...
- hdu3790 dijkstra+堆优化
题目来源:http://acm.hdu.edu.cn/showproblem.php?pid=3790 分析:dijkstra没有优化的话,复杂度是n*n,优化后的复杂度是m*logm,n是顶点数,m ...
随机推荐
- [Repost] 常用素数
作者:Miskcoo(http://blog.miskcoo.com/2014/07/fft-prime-table) 如果 \(r\cdot 2^k+1\) 是个素数, 那么在 \(\bmod r\ ...
- NOIP普及组:买铅笔
参加考试的时候,第一题我足足花了四十多分钟(因为那奇葩的键盘,幸好我向老师报告更换了键盘),还是只得了五十分... 题目描述: P老师需要去商店买n支铅笔作为小朋友们参加NOIP的礼物.她发现商店一共 ...
- [CSP-S模拟测试]:u(差分)
题目背景 $\frac{1}{4}$遇到了一道水题,完全不会做,于是去请教小$D$.小$D$看了一眼就切掉了这题,嘲讽了$\frac{1}{4}$一番就离开了.于是,$\frac{1}{4}$只好来问 ...
- SQL学习记录:函数(二)
字符串函数 1.获取字符的ASCII码 语法结构: ASCII(espression) 这里的expression是一个返回char或varchar数据类型的表达式,ASCII函数仅对表达式最左 ...
- English-such as, for example, include and contain
such as 后接动词,通常用动名词,有时也可用动词原形 for example 后接动词,用动名词 include vt. 包含,包括 后接动词,用动名词 英英: If one thing inc ...
- USACO 6.1 章节
Postal Vans 题目大意 4*n的网格,要经过所有点的有向有环,不重复经过点的路径总数 n<=1000 题解 显然 插头dp 以4为切面 问题是,会发现 超精度 解决呢要么实现高精度,要 ...
- cesium加载gltf模型
cesium加载gltf模型 一.采用vue-cesium:在项目里加载依赖包.命令如下: npm i --save vue-cesium 在main.js中加入如下代码: https://www.n ...
- code for QTP and ALM
'==========================================================================' Name: connectALM' Summa ...
- 创建调用Consul的客户端项目
创建调用Consul的客户端项目 创建项目 源码 Github仓库:https://github.com/sunweisheng/spring-cloud-example
- luoguP1525 关押罪犯 题解(NOIP2010)(并查集反集)
P1525 关押罪犯 题目 #include<iostream> #include<cstdlib> #include<cstdio> #include<c ...