论文阅读LR LIO-SAM
Abstract
紧耦合lidar inertial里程计, 用smoothing和mapping.
1. Introduction
紧耦合lidar-inertial里程计.
- 紧耦合的lidar inertial里程计框架
2. Related work
一般都是用ICP或者是GICP.
在LOAM[1], IMU被引入来de-skew lidar scan, 然后给移动一个先验做scan-匹配.
在[15], 预积分IMU测量被用来 de-skew 点云.
一个robocentric lidar-inertial 状态估计器, R-LINS[16] , 用error-state KF.
LIOM只能 0.6 倍实时
3. LiDAR Inertial Odometry via SAM
A. System Overview
状态是:
\]
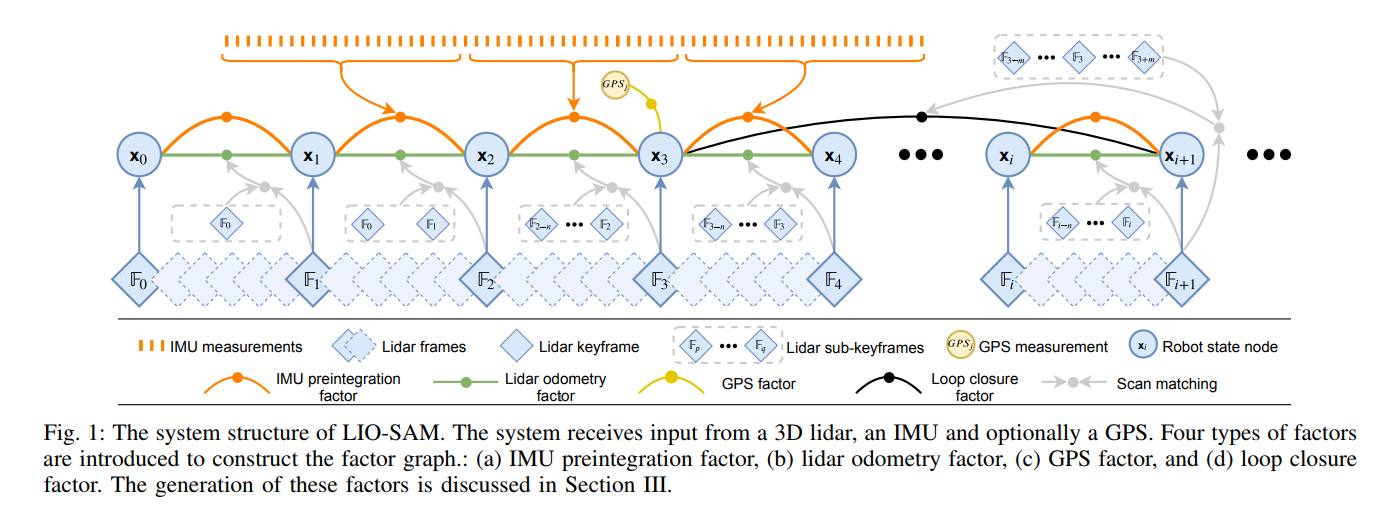
B. IMU Preintegration Factor
角速度, 加速度的测量:
\hat{\boldsymbol{\omega}}_{t}=\boldsymbol{\omega}_{t}+\mathbf{b}_{t}^{\boldsymbol{\omega}}+\mathbf{n}_{t}^{\boldsymbol{\omega}} \\
\hat{\mathbf{a}}_{t}=\mathbf{R}_{t}^{\mathbf{B W}}\left(\mathbf{a}_{t}-\mathbf{g}\right)+\mathbf{b}_{t}^{\mathbf{a}}+\mathbf{n}_{t}^{\mathbf{a}},
\end{array}
\]
这里 \(\hat{\omega}_t\) 和 \(\hat{a}_t\) 是 raw 测量在 \(B\) 系.
速度, 位置和旋转在 \(t+\Delta t\)时刻如下:
\mathbf{v}_{t+\Delta t}=\mathbf{v}_{t}+\mathbf{g} \Delta t+\mathbf{R}_{t}\left(\hat{\mathbf{a}}_{t}-\mathbf{b}_{t}^{\mathbf{a}}-\mathbf{n}_{t}^{\mathbf{a}}\right) \Delta t \\
\mathbf{p}_{t+\Delta t}=\mathbf{p}_{t}+\mathbf{v}_{t} \Delta t+\frac{1}{2} \mathbf{g} \Delta t^{2} \\
&+\frac{1}{2} \mathbf{R}_{t}\left(\hat{\mathbf{a}}_{t}-\mathbf{b}_{t}^{\mathbf{a}}-\mathbf{n}_{t}^{\mathbf{a}}\right) \Delta t^{2} \\
\mathbf{R}_{t+\Delta t}=\mathbf{R}_{t} \exp \left(\left(\hat{\boldsymbol{\omega}}_{t}-\mathbf{b}_{t}^{\omega}-\mathbf{n}_{t}^{\omega}\right) \Delta t\right)
\end{aligned}
\]
这里 \(R_t = R_t^{WB} = R_t^{{BW}^T}\). 这里我们假设 角速度 和 加速度 的\(B\) 保持不变.
C. LiDAR Odometry Factor
当一个新的scan到达时, 我们先做特征提取. Edge / planar 特征被提取来估计局部点的roughness. 有大的 roughness值的实被分类为edge, 值小的就是planar特征.
1. Sub-keyframes for voxel map
2. Scan-matching
3. Relative transform
edge点和平面点对应如下:
\mathbf{d}_{e_{k}}=\frac{\left|\left(\mathbf{p}_{i+1, k}^{e}-\mathbf{p}_{i, u}^{e}\right) \times\left(\mathbf{p}_{i+1, k}^{e}-\mathbf{p}_{i, v}^{e}\right)\right|}{\left|\mathbf{p}_{i, u}^{e}-\mathbf{p}_{i, v}^{e}\right|} \\
\mathbf{d}_{p_{k}}=\frac{\left(\mathbf{p}_{i, u}^{p}-\mathbf{p}_{i, v}^{p}\right) \times\left(\mathbf{p}_{i, u}^{p}-\mathbf{p}_{i, w}^{p}\right) \mid}{\left|\left(\mathbf{p}_{i, u}^{p}-\mathbf{p}_{i, v}^{p}\right) \times\left(\mathbf{p}_{i, u}^{p}-\mathbf{p}_{i, w}^{p}\right)\right|}
\end{array}
\]
D. GPS Factor
当收到GPS测量的时候, 我会先转换到局部笛卡尔坐标系.
一般我们只有在估计的位置协方差大于接受的GPS位置协方差的时候才加入 GPS factor.
E. Loop Closure Factor
...
4. Experiments
我们比较了LIO-SAM, LOAM和LIOM. LIO-SAM和LOAM是专注在实时的输出, 而LIOM是有无限的时间处理的.
A. Rotation Dataset
遇到的最大的旋转速度是 133.7°/s.
B. Walking Dataset
LIOM只跑了0.56x的实时.
C. Campus Dataset
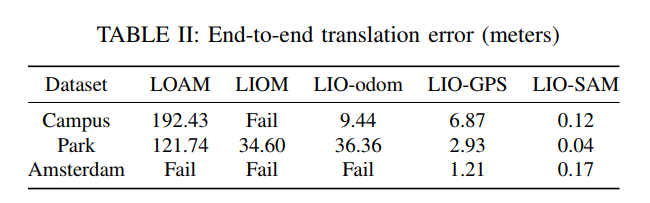
D. Park Dataset
...
E. Amsterdam Dataset
....
F. Benchmarking Results
...
5. Conclusions and Discussion
没啥.
论文阅读LR LIO-SAM的更多相关文章
- 论文阅读 | FoveaBox: Beyond Anchor-based Object Detector
论文阅读——FoveaBox: Beyond Anchor-based Object Detector 概述 这是一篇ArXiv 2019的文章,作者提出了一种新的anchor-free的目标检测框架 ...
- [论文阅读]阿里DIN深度兴趣网络之总体解读
[论文阅读]阿里DIN深度兴趣网络之总体解读 目录 [论文阅读]阿里DIN深度兴趣网络之总体解读 0x00 摘要 0x01 论文概要 1.1 概括 1.2 文章信息 1.3 核心观点 1.4 名词解释 ...
- 论文阅读(Xiang Bai——【PAMI2017】An End-to-End Trainable Neural Network for Image-based Sequence Recognition and Its Application to Scene Text Recognition)
白翔的CRNN论文阅读 1. 论文题目 Xiang Bai--[PAMI2017]An End-to-End Trainable Neural Network for Image-based Seq ...
- BITED数学建模七日谈之三:怎样进行论文阅读
前两天,我和大家谈了如何阅读教材和备战数模比赛应该积累的内容,本文进入到数学建模七日谈第三天:怎样进行论文阅读. 大家也许看过大量的数学模型的书籍,学过很多相关的课程,但是若没有真刀真枪地看过论文,进 ...
- 论文阅读笔记 - YARN : Architecture of Next Generation Apache Hadoop MapReduceFramework
作者:刘旭晖 Raymond 转载请注明出处 Email:colorant at 163.com BLOG:http://blog.csdn.net/colorant/ 更多论文阅读笔记 http:/ ...
- 论文阅读笔记 - Mesos: A Platform for Fine-Grained ResourceSharing in the Data Center
作者:刘旭晖 Raymond 转载请注明出处 Email:colorant at 163.com BLOG:http://blog.csdn.net/colorant/ 更多论文阅读笔记 http:/ ...
- Deep Reinforcement Learning for Dialogue Generation 论文阅读
本文来自李纪为博士的论文 Deep Reinforcement Learning for Dialogue Generation. 1,概述 当前在闲聊机器人中的主要技术框架都是seq2seq模型.但 ...
- 论文阅读笔记 Word Embeddings A Survey
论文阅读笔记 Word Embeddings A Survey 收获 Word Embedding 的定义 dense, distributed, fixed-length word vectors, ...
- 论文阅读笔记六:FCN:Fully Convolutional Networks for Semantic Segmentation(CVPR2015)
今天来看一看一个比较经典的语义分割网络,那就是FCN,全称如题,原英文论文网址:https://people.eecs.berkeley.edu/~jonlong/long_shelhamer_fcn ...
随机推荐
- Pytest自动化测试 - 完美结合Allure
简介 Allure Framework是一种灵活的.轻量级.多语言测试报告工具. 不仅可以以简洁的网络报告形式非常简洁地显示已测试的内容, 而且还允许参与开发过程的每个人从日常执行中提取最大程度的有用 ...
- DevOps Workshop | 代码管理入门:基于代码扫描实现团队效率提升
CODING「DevOps Workshop 学习营地」持续火热进行中! 在这里,你可以轻松实践 DevOps 全流程.体验高效的云端开发.赢取精美礼品--第二期大奖「戴尔 U2718Q 显示器」将于 ...
- Prometheus+Grafana+Alertmanager实现告警推送教程 ----- 图文详解
前言 本文主要介绍的是Prometheus采集数据,通过Grafana加上PromQL语句实现数据可视化以及通过Alertmanage实现告警推送功能.温馨提示,本篇文章特长,2w多的文字加上几十张图 ...
- vue 项目在 IE11 里呈现空白,不兼容的问题解决方案
我用vue 2.6.11版本编写的项目,在谷歌浏览器上运行的好好地,但是放到ie11浏览器上却是一片空白. 这个问题遇到的时候,我是蒙蔽了,抓紧去搜了搜百度,百度上的答案倒是都很统一. 都是说ie不兼 ...
- matlab中实现 IEEE754浮点数 与 一般十进制数之间 互相转换的方法
------------恢复内容开始------------ %2020/12/2 11:42:31clcformat long % IEEE754 to deca = '40800000'a = d ...
- Error:Execution failed for task ':app:compileDebugAidl'. > java.lang.IllegalStateException: aidl is missing from '/Users/renguodong/Library/Android/sdk/build-tools/26.0.2/aidl'
错误信息:Error:Execution failed for task ':app:compileDebugAidl'. > java.lang.IllegalStateException: ...
- JZOJ 11.21 提高B组反思
JZOJ 11.21 提高B组反思 T1 第二类斯特林数 直接套公式 \(S(i,j)=S(i-1,j-1)+S(i-1,j)*j\) 由于过大,\(unsigned\ long\ long\)都存不 ...
- 第7.27节 Python案例详解: @property装饰器定义属性访问方法getter、setter、deleter
上节详细介绍了利用@property装饰器定义属性的语法,本节通过具体案例来进一步说明. 一. 案例说明 本节的案例是定义Rectangle(长方形)类,为了说明问题,除构造函数外,其他方法都只 ...
- (转)oracle体系结构
对于一门技术的学习,尤其是像Oracle database这种知识体系极其庞杂的技术来讲,从宏观上了解其体系结构是至关重要的.同时,个人认为,未必是专业DBA人员才需要了解其体系结构(固然对于数据库专 ...
- python+request+unittest+HTMLTestRunner
https://www.imooc.com/article/details/id/20813 https://www.cnblogs.com/fennudexiaoniao/p/7771931.htm ...