Jetson AGX Xavier刷机
1. 准备一台电脑做主机(host),运行Ubuntu系统,我用的是虚拟机,运行的是Ubuntu 18.04系统。
2. 主机更换apt-get源,参见https://www.cnblogs.com/gloria-zhang/p/12803075.html
3. 用原装USB-typeC线连接主机和Xavier(电源灯旁边的typeC口),保持Xavier关机状态。
4. 在主机上下载JetPack SDK,地址https://developer.nvidia.com/embedded/jetpack。选择Xavier系列,下载NVIDIA SDK Manager,我安装的是4.3版本。

5. 运行sdkmanager
sudo apt install ./sdkmanager_1.0.1-5538_amd64.deb
sdkmanager
启动后主界面输入英伟达网页注册的账号密码,在线刷机,数据收集选哪个都行。


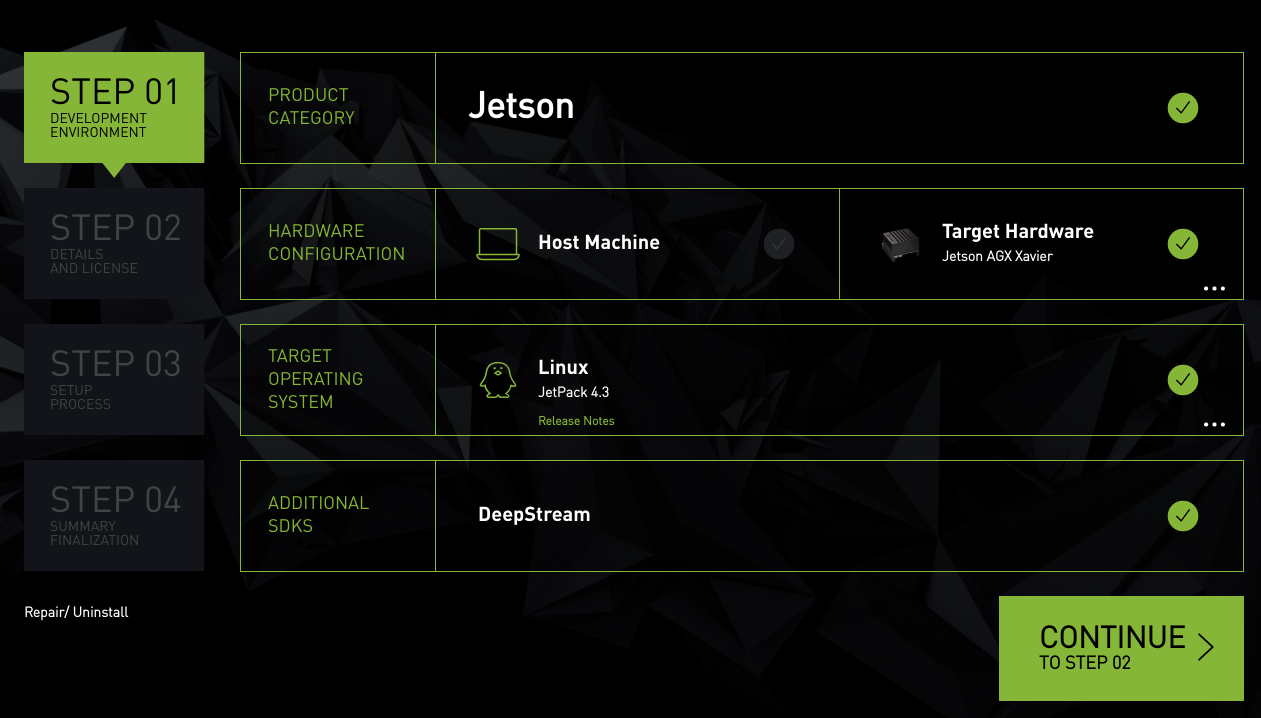
第一步中选择相关内容,Host Machine是给主机安装的,可以不选,我用的虚拟机不需要安装什么。
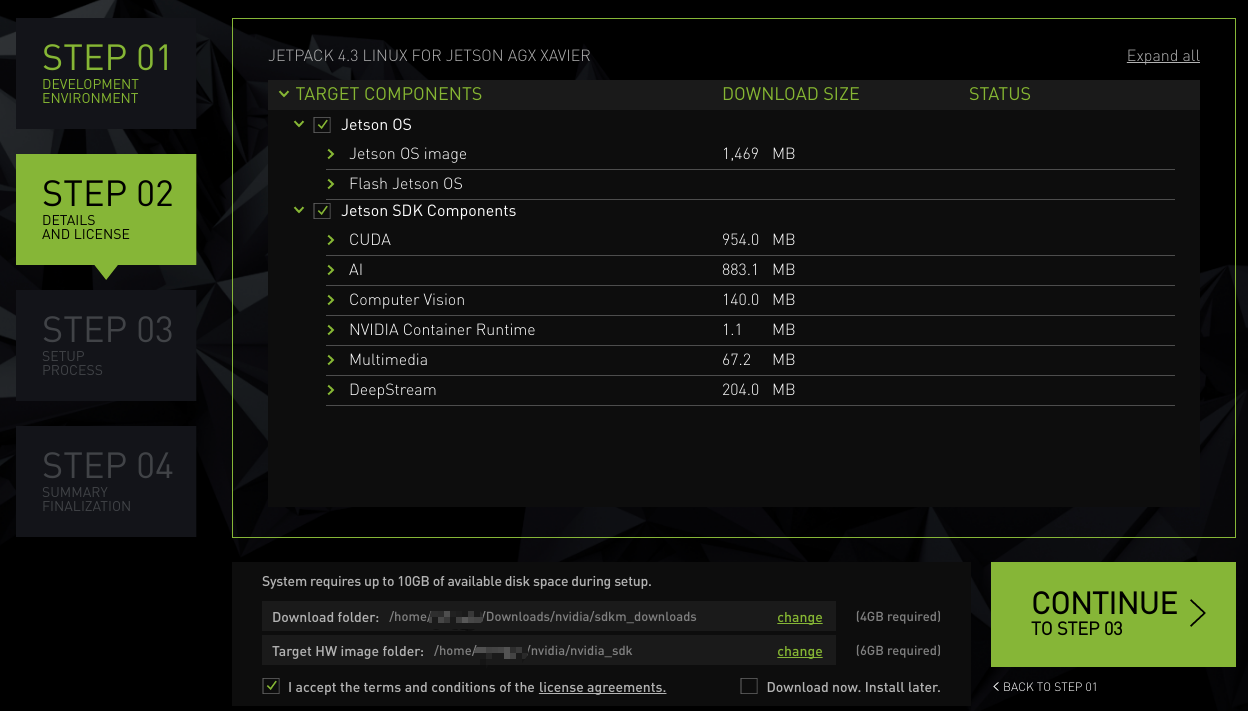
第二步中可以先下载再安装,全都下载好之后也可以在主页面选离线安装。
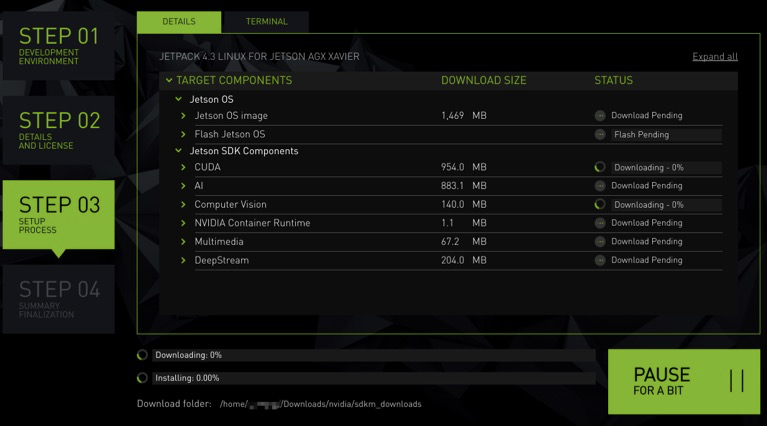
进入安装界面会要求输入主机密码,然后进入安装界面。

开始安装时会先执行Jetson OS image,准备镜像,完成后跳出刷机准备,可以选自动和手动,如果Xavier设备可以正常启动,进入操作系统,那就可以选择自动,不过我用自动模式没有成功过,所以选择手动模式。
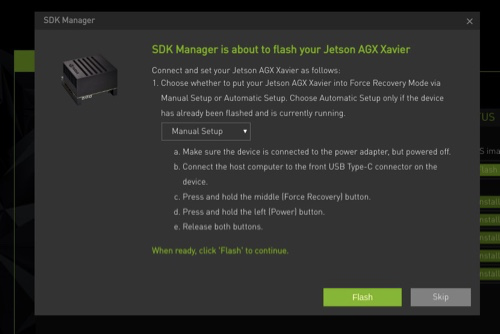
按照上面显示的步骤,连接好主机和设备,进入恢复模式后,可以在终端输入lsusb,查看是否连接成功,如果出现Nvidia Corp,就说明连接成功,点Flash,开始刷系统。

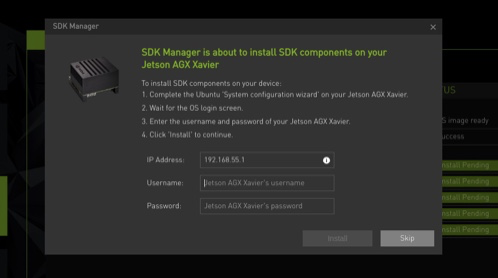
当Flash Jetson OS完成后,会弹出一个窗口,要求输入Xavier的用户名和密码,这是需要在Xavier上进行系统设置,并更换apt源。https://www.cnblogs.com/gloria-zhang/p/12802995.html
然后在主机端弹出的窗口中输入刚配置的Xavier的用户名和密码,等待安装结束。
这样刷机就成功了,安装界面上显示的都安装到Xavier上了。
Jetson AGX Xavier刷机的更多相关文章
- Jetson AGX Xavier ROS下调用USB单目摄像头
Jetson AGX Xavier安装的ROS是Melodic版本的,所以部署的时候用到的包都是Melodic的. 1. 查看USB摄像头 摄像头连接Xavier设备,调用命令查看. ls /dev/ ...
- 使用jetpack 4.2.2对jetson tx2进行刷机
一.前言 加班加点几天今天终于成功刷机,记录一下成功的一些过程,以方便同样卡住的朋友参考. 延续官网教程[1]中对设备的叫法,pc机称为host,tx2称为target. 二.过程 1. host相关 ...
- Jetson AGX Xavier更换apt-get源
使用apt-get安装时,会很慢,更换了国内的源后,就可以解决这个问题了. 1. 备份sources.list文件 sudo cp /etc/apt/sources.list /etc/apt/sou ...
- Jetson AGX Xavier安装TensorFlow
参考https://docs.nvidia.com/deeplearning/frameworks/install-tf-jetson-platform/#prereqs 1. 安装系统包 sudo ...
- Jetson AGX Xavier/Ubuntu更改pip3源
pip3换源: 修改~/.pip/pip.conf,如果没有这个文件,就创建一个. 内容如下: [global]index-url = https://pypi.tuna.tsinghua.edu.c ...
- Jetson AGX Xavier/Ubuntu安装SSD
参考 https://blog.csdn.net/xingdou520/article/details/84309155 1. 查看硬盘所有分区 sudo fdisk -lu 会找到/dev/nvme ...
- Jetson AGX Xavier/Ubuntu安装QT
安装QT命令 sudo apt-get install qt5-default qtcreator -y 如果出现错误:unknow module webenginewidgets serialpor ...
- Jetson AGX Xavier/ubuntu查找文件
用以下命令查找文件 sudo updatedb locate xxx #xxx是文件名 如果找不到命令,则需要安装mlocate sudo apt-get install mlocate
- Jetson AGX Xavier部署ORB_SLAM2(ROS)
1. 修改CMakeLists.txt Examples/ROS/ORB_SLAM2下的CMakeLists.txt 原 set(LIBS ${OpenCV_LIBS} ${EIGEN3_LIBS} ...
随机推荐
- 手工注入——access手工注入实战和分析
今天进行了access手工注入,下面是我的实战过程和总结. 实战环境使用的是墨者学院的在线靶场.下面咱们直接进入主题. 第一步,判断注入点 通过‘ 或者 and 1=1 和 and 1=2 是否报错, ...
- Js闭包练习2020031801
<!DOCTYPE html PUBLIC "-//W3C//DTD HTML 4.01//EN" "http://www.w3.org/TR/html4/stri ...
- E - River Hopscotch POJ - 3258(二分)
E - River Hopscotch POJ - 3258 Every year the cows hold an event featuring a peculiar version of hop ...
- P1004 方格取数(四维dp)
P1004 方格取数 思路如下 这题是看洛谷大佬的思路才写出来的,所以我会把大佬的思路展示如下: 1⃣️:我们可以找到一个叫思维dp的东西,dp[i][j][k][l],其中前两维表示一个人从原点出发 ...
- hello world: 我的博客写作思路
1. 本人计算机专业,研究生刚毕业,即将入职金融科技领域,决定借博客园平台写自己的博客,原因如下: 从小白到大白,离不开各大学习平台和技术博客的指导和分享,是时候回馈了. 借此机会整理自己从本科.研究 ...
- Linux命文件与目录属性
一.linux系统中文件标志 d ===> 目录 - ===> 文件 l ===> 连接文件 b ===> 可供存储设备文件 c ===> 串形端口设备文件(鼠标,键盘) ...
- django->model模型操作(数据库操作)
一.字段类型 二.字段选项说明 三.内嵌类参数说明abstract = Truedb_table = 'table_name' #表名,默认的表名是app_name+类名ordering = ['id ...
- Flex Socket与Java通信实例说明(转)
Flex Socket与Java通信实例说明(转) 这两天一直在flex的Socket ,现在终于懂了很多.由浅到深一步一步深入.慢慢体会实例,虽然实例都是在网上找的,但也经过了我的测试.我比较喜欢注 ...
- java 第七周课后作业0417
定义一个矩形类Rectangle:(知识点:对象的创建和使用)1 定义三个方法:getArea()求面积.getPer()求周长,showAll()分别在控制台输出长.宽.面积.周长.2 有2个属性: ...
- ModuleNotFoundError: No module named 'sklearn.cross_validation'
本文为CSDN博主「不服输的南瓜」的原创文章,遵循 CC 4.0 BY-SA 版权协议 原文链接 ModuleNotFoundError: No module named 'sklearn.cross ...