目标检测-基于Pytorch实现Yolov3(1)- 搭建模型
原文地址:https://www.cnblogs.com/jacklu/p/9853599.html
本人前段时间在T厂做了目标检测的项目,对一些目标检测框架也有了一定理解。其中Yolov3速度非常快,效果也还可以,但在github上还没有完整的基于pytorch的yolov3代码,目前star最多的pytorch yolov3项目只能做预测,没有训练代码,而且我看了它的model写得不是很有层次。自己准备利用接下来的几个周末把这个坑填上。
希望能够帮助开发者了解如何基于Pytorch实现一个强大的目标检测模型,同时可以方便的将模型应用到自己的数据集里。完整的源代码准备在文章结束后考虑发布在github上。
准备的目录:
目标检测-基于Pytorch实现Yolov3(1)- 搭建模型 (model.py,最容易的部分,所以第一篇写这个)
目标检测-基于Pytorch实现Yolov3(2)- 数据预处理及数据加载 (dataloader.py,非常重要的一部分,代码工作量最大,定制化只要在这一部分下功夫)
目标检测-基于Pytorch实现Yolov3(3)- 目标函数 (loss.py,最重要的部分,直接决定了网络的效果,难度也是5部分里最大的)
目标检测-基于Pytorch实现Yolov3(4)- 模型训练 (train.py,前面重要的3部分都做完了,这部分就是写完代码喝茶看曲线的时间)
目标检测-基于Pytorch实现Yolov3(5)- 模型预测 (test.py,检验模型训练好坏,还有一些坑要填)
代码主要参考github上基于keras的yolov3的实现,代码结构非常清晰。
Darknet卷积模块
Yolo系列的作者把yolo网络叫做Darknet,其实其他神经网络库都已经把卷积层写好了,直接堆叠起来即可。
darknet卷积模块是这个模型里最基本的网络单元,包括卷积层、batch norm(BN)层、激活函数,因此类型命名为 DarknetConv2D_BN_Leaky。原keras实现是卷积层加了L2正则化预防过拟合,Pytorch是把这个操作放到了Optimizer中,所以将在第三部分讲解。
用Pytorch需要注意, 如果你训练的时候GPU显存不大,batch size设的很小,这时候你就要考虑训练数据集的分布情况。举个例子,加入你的batch size设成了1,但你数据每张图差别都很大,这会导致你的网络一直在震荡,即使网络能够训练到很低的training loss,
在做预测的时候效果也不好,这主要是BN造成的。因为每批数据的统计量(均值和方差)都不同,而且差别大,这就导致网络训练学不到好的BN层的统计量。如果直接去掉BN层,你会发现网络训练非常慢,所以BN层还是要加的,好在Pytorch里的BN有个接口来控制要不要记住每批训练的统计量,即track_running_stats=True,如果训练的batch size不能设特别大,就把它改成False。
卷积层、BN层说完了,激活函数Yolo里用的是0.1的LeakReLU,本人实验发现和ReLU没什么明显的区别(水论文真是一门艺术,我的水文怎么就不中嘞?)
结构很简答,这部分直接上代码,不画图了。
import torch.nn as nn
import torch
class DarknetConv2D_BN_Leaky(nn.Module):
def __init__(self, numIn, numOut, ksize, stride = 1, padding = 1):
super(DarknetConv2D_BN_Leaky, self).__init__()
self.conv1 = nn.Conv2d(numIn, numOut, ksize, stride, padding)#regularizer': l2(5e-4)
self.bn1 = nn.BatchNorm2d(numOut)
self.leakyReLU = nn.LeakyReLU(0.1) def forward(self, x):
x = self.conv1(x)
x = self.bn1(x)
x = self.leakyReLU(x)
return x
残差模块
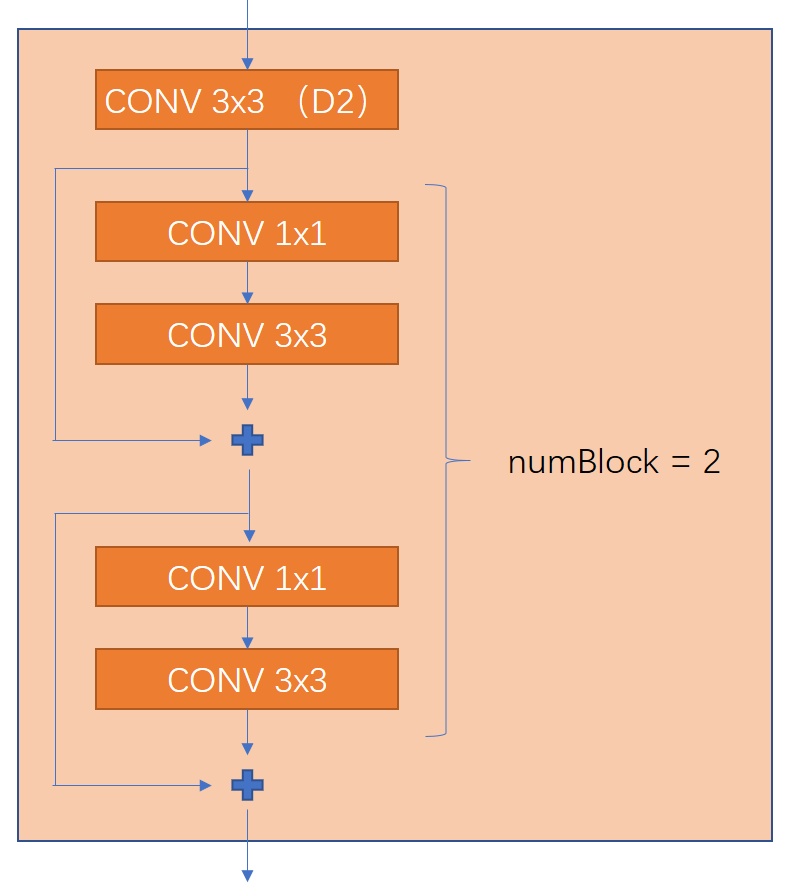
残差模块是借鉴了ResNet,残差模块是为了保证深的模型能够得到很好的训练。残差模块ResidualBlock,对外接口有numIn, numOut, numBlock,分别控制模块的输入通道数,输出通道数(卷积核数)和残差模块的堆叠次数。下图是一个numBlock = 2 的模型,注意这里CONV是指上一部分说的Darknet卷积模块,第一个模块(D2)表示是这个卷积模块stride = 2,及顺便执行了2倍降采样操作。也就是说特征每经过一个残差模块,分辨率降为原来的一半。
class ResidualBlock(nn.Module):
def __init__(self, numIn, numOut, numBlock):
super(ResidualBlock, self).__init__()
self.numBlock = numBlock
self.dark_conv1 = DarknetConv2D_BN_Leaky(numIn, numOut, ksize = 3, stride = 2, padding = 1)
self.dark_conv2 = []
for i in range(self.numBlock):
layers = []
layers.append(DarknetConv2D_BN_Leaky(numOut, numOut//2, ksize = 1, stride = 1, padding = 0))
layers.append(DarknetConv2D_BN_Leaky(numOut//2, numOut, ksize = 3, stride = 1, padding = 1))
self.dark_conv2.append(nn.Sequential(*layers))
self.dark_conv2 = nn.ModuleList(self.dark_conv2)
def forward(self, x):
x = self.dark_conv1(x)
for convblock in self.dark_conv2:
residual = x
x = self.convblock(x)
x = x + residual
return x
后端输出模块
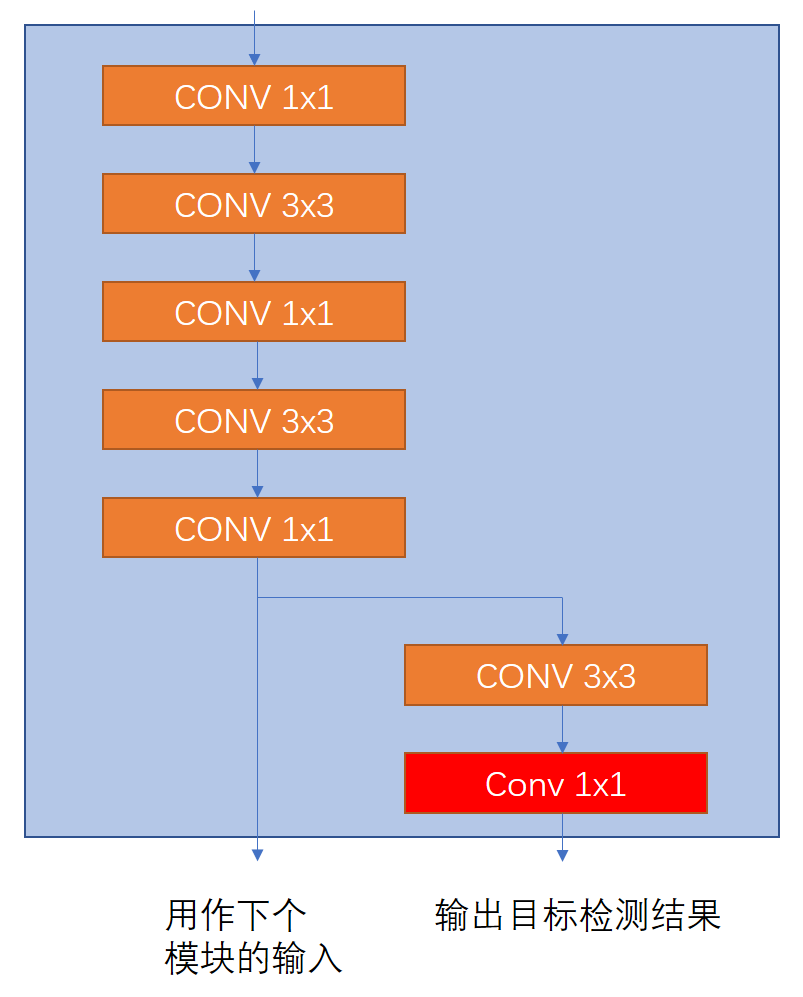
后端输出模块是一个三次降采样(三次升采样在下一部分介绍),这三次降采样+三次升采样,类似Encoder-Decoder的FCN模型。是为了在三种不同尺度上预测。本系列将在voc2007上训练,训练前输入图片要resize到256x256,那么这三种尺度分别是32x32,16x16,8x8。这一部分是因为图片中的目标有大有小,为了保证从不同尺度上找到最好尺度的特征图来进行预测。当然准确提升的同时,由于分辨率有提升,计算量又有一定的增加,索性我们这里的分辨率不大。下图所示为最后输出模块,这个模块有两个输出,一个是用作下一个模块的输入,一个是用于输出目标检测结果,即坐标、类别和目标置信度,这一部分将在下一篇详细介绍。注意红色的Conv不是DarknetConv2D_BN_Leaky,而是指普通的卷积模块。
class LastLayer(nn.Module):
def __init__(self, numIn, numOut, numOut2):
super(LastLayer, self).__init__()
self.dark_conv1 = DarknetConv2D_BN_Leaky(numIn, numOut, ksize = 1, stride = 1, padding = 0)
self.dark_conv2 = DarknetConv2D_BN_Leaky(numOut, numOut*2, ksize = 3, stride = 1, padding = 1)
self.dark_conv3 = DarknetConv2D_BN_Leaky(numOut*2, numOut, ksize = 1, stride = 1, padding = 0)
self.dark_conv4 = DarknetConv2D_BN_Leaky(numOut, numOut*2, ksize = 3, stride = 1, padding = 1)
self.dark_conv5 = DarknetConv2D_BN_Leaky(numOut*2, numOut, ksize = 1, stride = 1, padding = 0) self.dark_conv6 = DarknetConv2D_BN_Leaky(numOut, numOut*2, ksize = 3, stride = 1, padding = 1)
self.conv7 = nn.Conv2d(numOut*2, numOut2, 1, stride = 1, padding = 0) def forward(self, x):
x = self.dark_conv1(x)
x = self.dark_conv2(x)
x = self.dark_conv3(x)
x = self.dark_conv4(x)
x = self.dark_conv5(x) y = self.dark_conv6(x)
y = self.conv7(y)
return x,y
Yolov3模型
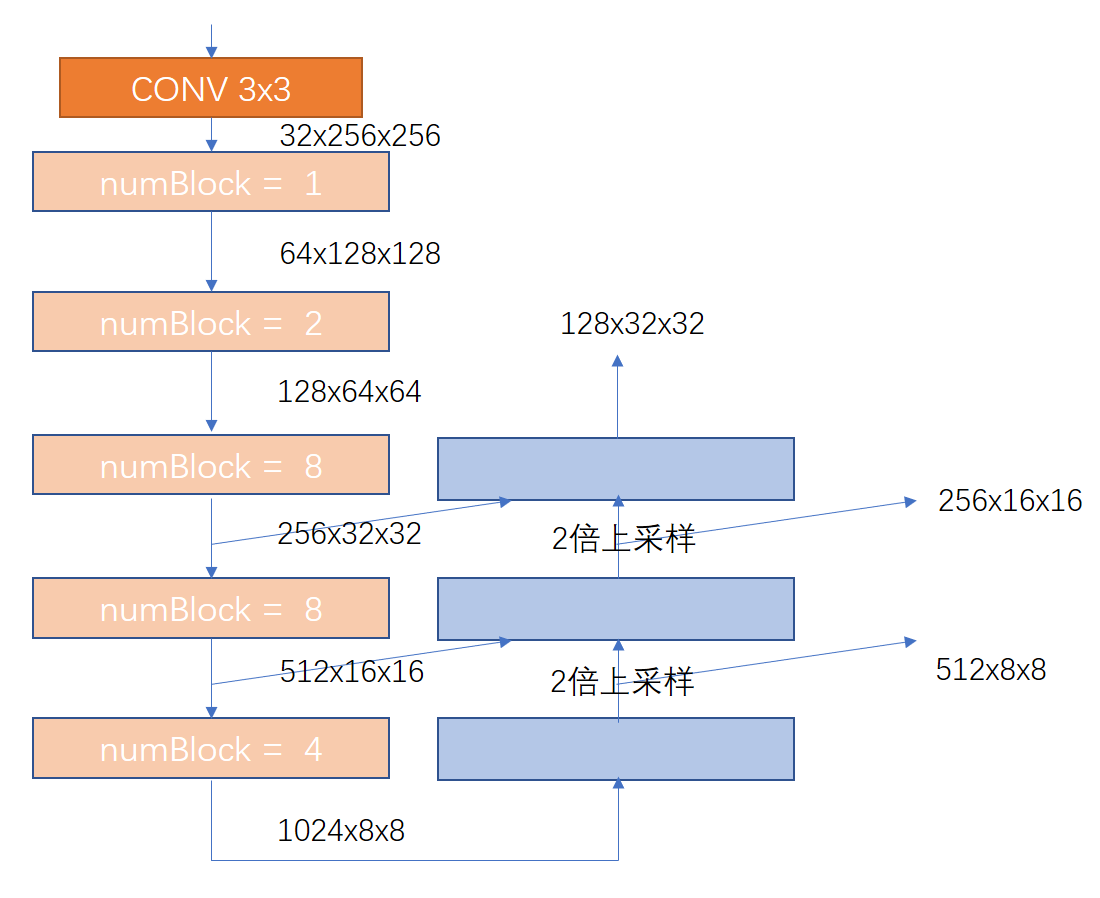
基本的模块已经定义好,Yolov3的模型就是把这些模型叠加起来。注意下图就是Yolov3的简化模型,数字表示该上一个模块的输出特征尺寸(CxHxW),相应的颜色对应相应的模块
class Yolov3(nn.Module):
def __init__(self, numAnchor, numClass):
super(Yolov3, self).__init__()
self.dark_conv1 = DarknetConv2D_BN_Leaky(3, 32, ksize = 3, stride = 1, padding = 1)
self.res1 = ResidualBlock(32, 64, 1)
self.res2 = ResidualBlock(64, 128, 2)
self.res3 = ResidualBlock(128, 256, 8)
self.res4 = ResidualBlock(256, 512, 8)
self.res5 = ResidualBlock(512, 1024, 4) self.last1 = LastLayer(1024, 512, numAnchor*(numClass+5))
self.up1 = nn.Sequential(DarknetConv2D_BN_Leaky(512, 256, ksize = 1, stride = 1, padding = 0),
nn.Upsample(scale_factor=2))
self.last2 = LastLayer(768, 256, numAnchor*(numClass+5))
self.up2 = nn.Sequential(DarknetConv2D_BN_Leaky(256, 128, ksize = 1, stride = 1, padding = 0),
nn.Upsample(scale_factor=2))
self.last3 = LastLayer(384, 128, numAnchor*(numClass+5)) def forward(self, x):
x = self.dark_conv1(x)#32x256x256
x = self.res1(x)#64x128x128
x = self.res2(x)#128x64x64
x3 = self.res3(x)#256x32x32
x4 = self.res4(x3)#512x16x16
x5 = self.res5(x4)#1024x8x8 x,y1 = self.last1(x5)#512x8x8,
x = self.up1(x)#256x16x16
x = torch.cat((x, x4), 1)#768x16x16
x,y2 = self.last2(x)#256x16x16
x = self.up2(x)#128x32x32
x = torch.cat((x, x3), 1)#384x32x32
x,y3 = self.last3(x)#128x32x32 return y1,y2,y3
到这里模型已经完成,模型代码结构非常清晰。有人可能会问,为什么要这种堆叠方式,其实我自己也觉得模型没什么特别的地方,自己根据新的需求定义网络结构完全可以,但是要注意模型深度增加时如何保证收敛,如何加速模型训练,同时输出特征的分辨率要计算好。
参考资料
Yolov3 论文:https://pjreddie.com/media/files/papers/YOLOv3.pdf
Yolov3 Keras实现:https://github.com/qqwweee/keras-yolo3
我的博客即将同步至腾讯云+社区,邀请大家一同入驻:https://cloud.tencent.com/developer/support-plan?invite_code=28tgpk9aapxc4
目标检测-基于Pytorch实现Yolov3(1)- 搭建模型的更多相关文章
- 从零开始实现SSD目标检测(pytorch)(一)
目录 从零开始实现SSD目标检测(pytorch) 第一章 相关概念概述 1.1 检测框表示 1.2 交并比 第二章 基础网络 2.1 基础网络 2.2 附加网络 第三章 先验框设计 3.1 引言 3 ...
- 目标检测(七)YOLOv3: An Incremental Improvement
项目地址 Abstract 该技术报告主要介绍了作者对 YOLOv1 的一系列改进措施(注意:不是对YOLOv2,但是借鉴了YOLOv2中的部分改进措施).虽然改进后的网络较YOLOv1大一些,但是检 ...
- Win10 + YOLOv3 环境配置,编译,实现目标检测----How to compile YOLOv3 on Windows
其他比较好的参考链接: 环境配置: 环境配置的最终图片列表:https://blog.csdn.net/shanglianlm/article/details/80322718 视频讲解YOLOv1: ...
- 目标检测复习之YOLO系列
目标检测之YOLO系列 YOLOV1: blogs1: YOLOv1算法理解 blogs2: <机器爱学习>YOLO v1深入理解 网络结构 激活函数(leaky rectified li ...
- 目标检测论文解读1——Rich feature hierarchies for accurate object detection and semantic segmentation
背景 在2012 Imagenet LSVRC比赛中,Alexnet以15.3%的top-5 错误率轻松拔得头筹(第二名top-5错误率为26.2%).由此,ConvNet的潜力受到广泛认可,一炮而红 ...
- zz目标检测
deep learning分类 目标检测-HyperNet-论文笔记 06-06 基础DL模型-Deformable Convolutional Networks-论文笔记 06-05 基础DL模型- ...
- PyTorch专栏(八):微调基于torchvision 0.3的目标检测模型
专栏目录: 第一章:PyTorch之简介与下载 PyTorch简介 PyTorch环境搭建 第二章:PyTorch之60分钟入门 PyTorch入门 PyTorch自动微分 PyTorch神经网络 P ...
- 基于Intel OpenVINO的搭建及应用,包含分类,目标检测,及分割,超分辨
PART I: 搭建环境OPENVINO+Tensorflow1.12.0 I: l_openvino_toolkit_p_2019.1.094 第一步常规安装参考链接:https://docs.op ...
- GPU端到端目标检测YOLOV3全过程(下)
GPU端到端目标检测YOLOV3全过程(下) Ubuntu18.04系统下最新版GPU环境配置 安装显卡驱动 安装Cuda 10.0 安装cuDNN 1.安装显卡驱动 (1)这里采用的是PPA源的安装 ...
随机推荐
- ADOQuery的ltBatchOptimistic状态下的用法
在ADO的ltBatchOptimistic状态下(即缓存状态),如何实现单条记录的删除与修改,也可以选择的删除或修改? 一样的删除,只是最后提交方式不一样,以前的提交最后加上try ADOCon ...
- 【Linux笔记】CentOS yum 安装 vsftpd
vsftpd是一款在Linux发行版中最受推崇的FTP服务器程序.特点是小巧轻快,安全易用,下面直接上干货. 一.安装vsftp 以管理员的身份使用yum命令安装vsftp: [root@localh ...
- HttpWebRequest和HttpWebResponse的应用
创建使用类HttpHelper: public class Httpparam { public string UserAgent { get; set; } public string Accept ...
- HDU4055_Number String
题目告诉你在一个排列中,相邻两个数的大小关系.问你排列可能有多少种情况. DP. f[i][j]表示将i个数按照前面i-1个大小关系排列且最后一个数位j的排列数有多少个. 这样对于新加入的一个数i+1 ...
- poj2914-Minimum Cut
题意 \(n\) 个点 \(m\) 条边的无向带权图求全局最小割.\(n\le 500,m\le \frac{n(n-1)}{2}\) . 分析 参考了 这篇博客,去给他点赞. 嘛,今天研究了一下全局 ...
- oracle 物化视图 ORA-23413: 表 "xxx"."xx" 不带实体化视图日志
DROP materialized view log on TAB_NAME ; --不是view名,是表名 CREATE MATERIALIZED VIEW LOG ON TAB_NAME W ...
- [AT2172] [agc007_e] Shik and Travel
题目链接 AtCoder:https://agc007.contest.atcoder.jp/tasks/agc007_e 洛谷:https://www.luogu.org/problemnew/sh ...
- Glide加载图片并保存到本地返回file,bitmap
有很多朋友都想要知道32位和64位的区别是什么,因为大家都拿不准自己要装32位系统还是64位系统,因此彷徨是必然的.那么到底区别是啥咧?如果大家想要知道的话,下面就让小编给大家带来32位和64位的区别 ...
- Docker学习笔记一:如何在线安装
一.Docker简介: Docker 是一个开源的应用容器引擎,基于 Go 语言 并遵从Apache2.0协议开源.Docker 可以让开发者打包他们的应用以及依赖包到一个轻量级.可移植的容器中,然后 ...
- 【BZOJ1063】【NOI2008】道路设计(动态规划)
[BZOJ1063][NOI2008]道路设计(动态规划) 题面 BZOJ 题解 发现每个点最多只能被修一次等价于每个点最多只能和两条铁路相邻 考虑一个\(dp\) 设\(f[i][0/1/2]\)表 ...