压缩感知重构算法之子空间追踪(SP)
function [ theta ] = CS_SP( y,A,K )
%CS_SP Summary of this function goes here
%Version: 1.0 written by jbb0523 @2015-05-01
% Detailed explanation goes here
% y = Phi * x
% x = Psi * theta
% y = Phi*Psi * theta
% 令 A = Phi*Psi, 则y=A*theta
% K is the sparsity level
% 现在已知y和A,求theta
% Reference:Dai W,Milenkovic O.Subspace pursuit for compressive sensing
% signal reconstruction[J].IEEE Transactions on Information Theory,
% 2009,55(5):2230-2249.
[y_rows,y_columns] = size(y);
if y_rows<y_columns
y = y';%y should be a column vector
end
[M,N] = size(A);%传感矩阵A为M*N矩阵
theta = zeros(N,1);%用来存储恢复的theta(列向量)
Pos_theta = [];%用来迭代过程中存储A被选择的列序号
r_n = y;%初始化残差(residual)为y
for kk=1:K%最多迭代K次
%(1) Identification
product = A'*r_n;%传感矩阵A各列与残差的内积
[val,pos]=sort(abs(product),'descend');
Js = pos(1:K);%选出内积值最大的K列
%(2) Support Merger
Is = union(Pos_theta,Js);%Pos_theta与Js并集
%(3) Estimation
%At的行数要大于列数,此为最小二乘的基础(列线性无关)
if length(Is)<=M
At = A(:,Is);%将A的这几列组成矩阵At
else%At的列数大于行数,列必为线性相关的,At'*At将不可逆
break;%跳出for循环
end
%y=At*theta,以下求theta的最小二乘解(Least Square)
theta_ls = (At'*At)^(-1)*At'*y;%最小二乘解
%(4) Pruning
[val,pos]=sort(abs(theta_ls),'descend');
%(5) Sample Update
Pos_theta = Is(pos(1:K));
theta_ls = theta_ls(pos(1:K));
%At(:,pos(1:K))*theta_ls是y在At(:,pos(1:K))列空间上的正交投影
r_n = y - At(:,pos(1:K))*theta_ls;%更新残差
if norm(r_n)<1e-6%Repeat the steps until r=0
break;%跳出for循环
end
end
theta(Pos_theta)=theta_ls;%恢复出的theta
end
clear all;close all;clc;
load CoSaMPMtoPercentage1000;
PercentageCoSaMP = Percentage;
load SPMtoPercentage1000;
PercentageSP = Percentage;
S1 = ['-ks';'-ko';'-kd';'-kv';'-k*'];
S2 = ['-rs';'-ro';'-rd';'-rv';'-r*'];
figure;
for kk = 1:length(K_set)
K = K_set(kk);
M_set = 2*K:5:N;
L_Mset = length(M_set);
plot(M_set,PercentageCoSaMP(kk,1:L_Mset),S1(kk,:));%绘出x的恢复信号
hold on;
plot(M_set,PercentageSP(kk,1:L_Mset),S2(kk,:));%绘出x的恢复信号
end
hold off;
xlim([0 256]);
legend('CoSaK=4','SPK=4','CoSaK=12','SPK=12','CoSaK=20',...
'SPK=20','CoSaK=28','SPK=28','CoSaK=36','SPK=36');
xlabel('Number of measurements(M)');
ylabel('Percentage recovered');
title('Percentage of input signals recovered correctly(N=256)(Gaussian)');

压缩感知重构算法之子空间追踪(SP)的更多相关文章
- 浅谈压缩感知(二十四):压缩感知重构算法之子空间追踪(SP)
主要内容: SP的算法流程 SP的MATLAB实现 一维信号的实验与结果 测量数M与重构成功概率关系的实验与结果 SP与CoSaMP的性能比较 一.SP的算法流程 压缩采样匹配追踪(CoSaMP)与子 ...
- 浅谈压缩感知(二十八):压缩感知重构算法之广义正交匹配追踪(gOMP)
主要内容: gOMP的算法流程 gOMP的MATLAB实现 一维信号的实验与结果 稀疏度K与重构成功概率关系的实验与结果 一.gOMP的算法流程 广义正交匹配追踪(Generalized OMP, g ...
- 浅谈压缩感知(二十五):压缩感知重构算法之分段正交匹配追踪(StOMP)
主要内容: StOMP的算法流程 StOMP的MATLAB实现 一维信号的实验与结果 门限参数Ts.测量数M与重构成功概率关系的实验与结果 一.StOMP的算法流程 分段正交匹配追踪(Stagewis ...
- 浅谈压缩感知(二十六):压缩感知重构算法之分段弱正交匹配追踪(SWOMP)
主要内容: SWOMP的算法流程 SWOMP的MATLAB实现 一维信号的实验与结果 门限参数a.测量数M与重构成功概率关系的实验与结果 SWOMP与StOMP性能比较 一.SWOMP的算法流程 分段 ...
- 压缩感知重构算法之压缩采样匹配追踪(CoSaMP)
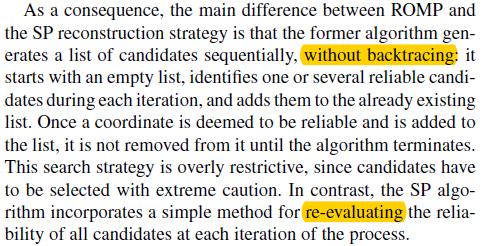
压缩采样匹配追踪(CompressiveSampling MP)是D. Needell继ROMP之后提出的又一个具有较大影响力的重构算法.CoSaMP也是对OMP的一种改进,每次迭代选择多个原子,除了 ...
- [转]压缩感知重构算法之分段正交匹配追踪(StOMP)
分段正交匹配追踪(StagewiseOMP)或者翻译为逐步正交匹配追踪,它是OMP另一种改进算法,每次迭代可以选择多个原子.此算法的输入参数中没有信号稀疏度K,因此相比于ROMP及CoSaMP有独到的 ...
- 浅谈压缩感知(二十三):压缩感知重构算法之压缩采样匹配追踪(CoSaMP)
主要内容: CoSaMP的算法流程 CoSaMP的MATLAB实现 一维信号的实验与结果 测量数M与重构成功概率关系的实验与结果 一.CoSaMP的算法流程 压缩采样匹配追踪(CompressiveS ...
- 浅谈压缩感知(二十二):压缩感知重构算法之正则化正交匹配追踪(ROMP)
主要内容: ROMP的算法流程 ROMP的MATLAB实现 一维信号的实验与结果 测量数M与重构成功概率关系的实验与结果 一.ROMP的算法流程 正则化正交匹配追踪ROMP算法流程与OMP的最大不同之 ...
- 浅谈压缩感知(二十一):压缩感知重构算法之正交匹配追踪(OMP)
主要内容: OMP的算法流程 OMP的MATLAB实现 一维信号的实验与结果 测量数M与重构成功概率关系的实验与结果 稀疏度K与重构成功概率关系的实验与结果 一.OMP的算法流程 二.OMP的MATL ...
随机推荐
- 支持语音识别、自然语言理解的微信小程序(“遥知之”智能小秘)完整源码分享
记录自己搭建https的silk录音文件语音识别服务的调用过程,所有代码可在文中找链接打包下载 >>>>>>>>>>>>> ...
- 【JavaScript】设计模式-module模式及其改进
写在前面 编写易于维护的代码,其中最重要的方面就是能够找到代码中重复出现的主题并优化他们,这也是设计模式最有价值的地方 说到这里...... <head first设计模式>里有一篇文章, ...
- php字符的替换,截取,指定查找
<?php/** * Created by 郭鹏. * User: msi * Date: 2017/9/27 * Time: 14:17 *///随机数生成器echo rand();echo ...
- IDEA- idea代码调试debug
IDEA有很多的快捷键,下面整理Debug的快捷键,方便自己使用!(阅读本篇可能花费您2分钟,需要多的实践练习) F9 resume programe 恢复程序 Alt+F10 show execut ...
- Day3 Python基础学习——文件操作、函数
一.文件操作 1.对文件操作流程 打开文件,得到文件句柄并赋值给一个变量 通过文件句柄对文件进行操作 关闭文件 #打开文件,读写文件,关闭文件 http://www.cnblogs.com/linha ...
- php中常用的字符串查找函数strstr()、strpos()实例解释
string strstr ( string $haystack , mixed $needle [, bool $before_needle = false ] ) 1.$haystack被查找的字 ...
- Docker入门之七Dockerfile
Dockerfile是一个文本格式的配置文本,可以使用它来创建自定义的镜像.首先我们可以先看一个dockerfile是什么样子.这里可以有一个网站不错:http://dockerfile.github ...
- 通过JQuery实现Ajax代码
今天早上遇到了这个问题,结果我写的顺序是惨不忍睹啊,所有现在留个模版以示标准. $(function(){ $.ajax({ url : "Servlet", //传地址 type ...
- 理解js中的运算符优先级
前言 我是有过这样的经历,获取年月日时写出这样的代码: new Date().getFullYear() 此时的我是心虚的,因为我不知道是先执行.运算还是new运算,于是赶紧贴到控制台里,哎呦
- Python实战之Selenium自动化测试web登录
#!/usr/bin/env python3 # -*- coding:utf-8 -*- from selenium import webdriver from selenium.webdriver ...