论文笔记:Auto-DeepLab: Hierarchical Neural Architecture Search for Semantic Image Segmentation
Auto-DeepLab: Hierarchical Neural Architecture Search for Semantic Image Segmentation
2019-03-18 14:45:44
Paper:https://arxiv.org/pdf/1901.02985
Offical TensorFlow Code: https://github.com/tensorflow/models/blob/master/research/deeplab/core/nas_network.py
PyTorch Code: https://github.com/Dawars/auto_deeplab-pytorch
Video Tutorial (韩语): https://www.youtube.com/watch?v=ltlhQXHGzgE
作者主页(Liang-Chieh Chen):http://liangchiehchen.com/
另外一个关于 NAS 做语义分割的工作是:Nekrasov, Vladimir, Hao Chen, Chunhua Shen, and Ian Reid. "Fast Neural Architecture Search of Compact Semantic Segmentation Models via Auxiliary Cells." arXiv preprint arXiv:1810.10804 (2018).
本文首次将 Neural Architecture Search(NAS) 引入到 semantic segmentation 领域,自动搜索网络结果,用于语义分割。
3. Architecture Search Space:
本节描述了我们的双层等级结构搜索空间。对于 inner cell level,我们重新利用了前人的工作,保持一致。对于 outer network level,在对许多工作进行总结和观察之后,作者提出一种新的搜索空间。
3.1 Cell Level Search Space:
作者定义 cell 为一个小的全卷机模块,通常重复很多次,以形成整个的神经网络。具体来说,一个 cell 是一个 directed acyclic graph,包含 B 个 blocks。
每个 block 是一个 two-branch structure,将 2 个输入tensors 映射为 1 个输出 tensor。在 cell l 中的 Block i 可能是由 五元组指定的(I1, I2, O1, O2, C),其中 I1,I2 是输入 tensor 的选择,O1,O2 是 layer types 的选择,C 是用于组合 the two branches 的单独输出,以构成该 block 的输出 tensor,$H_i^l$。该 cell 的输出 tensor $H^l$ 仅仅是该模块输出 tensors 的简单组合{$H_1^l, ... , H_B^l$}。
可能的输入 tensors $I_i^l$ 的集合,包含前一个 cell $H^{l-1}$ 的输出,前前个 cell $H^{l-2}$,以及前一个 block 在当前 cell {H_1^l, ... , H_i^l} 的输出。所以,我们在一个 cell 中,添加越多的 blocks,下一个 block 就可能会有更多的输入来源。
可能的 layer types,O,包含下列 8 个操作符,都与当前的 CNNs 紧密相关:

对于可能的组合操作函数,C,作者这里仅采用 element-wise addition。
3.2 Network Level Search Space:
在图像分类的 NAS framework 中,一旦一个 cell structure 被发现,整个的网络结构是用预先定义的模型来得到的。所以,the network-level 不是结构搜索的一部分,所以,其搜索空间从未被探索过。
这种预先定义的模式是非常简答和直观的:一些 “Normal cells” (Cells that keep the spatial resolution of the feature tensor)通过添加 “reduction cells” (cells that divide the spatial resolution by 2 and multiply the number of filters by 2) 被单独的分离。这种保持 downsampling 的策略,在图像分类的任务上是合理的。但是,在 dense image prediction 中,保持高分辨率同样重要,从而导致了更多的网络层次。
在进行 dense image prediction 的众多网络结构中,我们注意到如下两个原则是一致的:
1. the spatial resolution of the next layer is either twice as large, or twoice as small, or remains the same; (下一层的分辨率要么是 两倍大,两倍小,或者保持不变)
2. the smallest spatial resolution is downsampled by 32. (最小的空间分辨率下降为32)
服从这些公共的准则,我们提出如下的网络级别的搜索空间。网络的开始是一个 two-layer “stem” structure,每一次以幅度 2 来降低空间分辨率。在那之后,总共有 L layers 未知的空间分辨率,最大下降幅度为 4,最小的分辨率被下采样了 32. 由于每一层在空间分辨率上最多两个不同,在 stem 之后的第一层可以被将分辨率 4 或者 8. 我们在图 1中,展示了我们的网络级别搜索空间。我们的目标是在这 L层路径上,找到一个较好的 path。
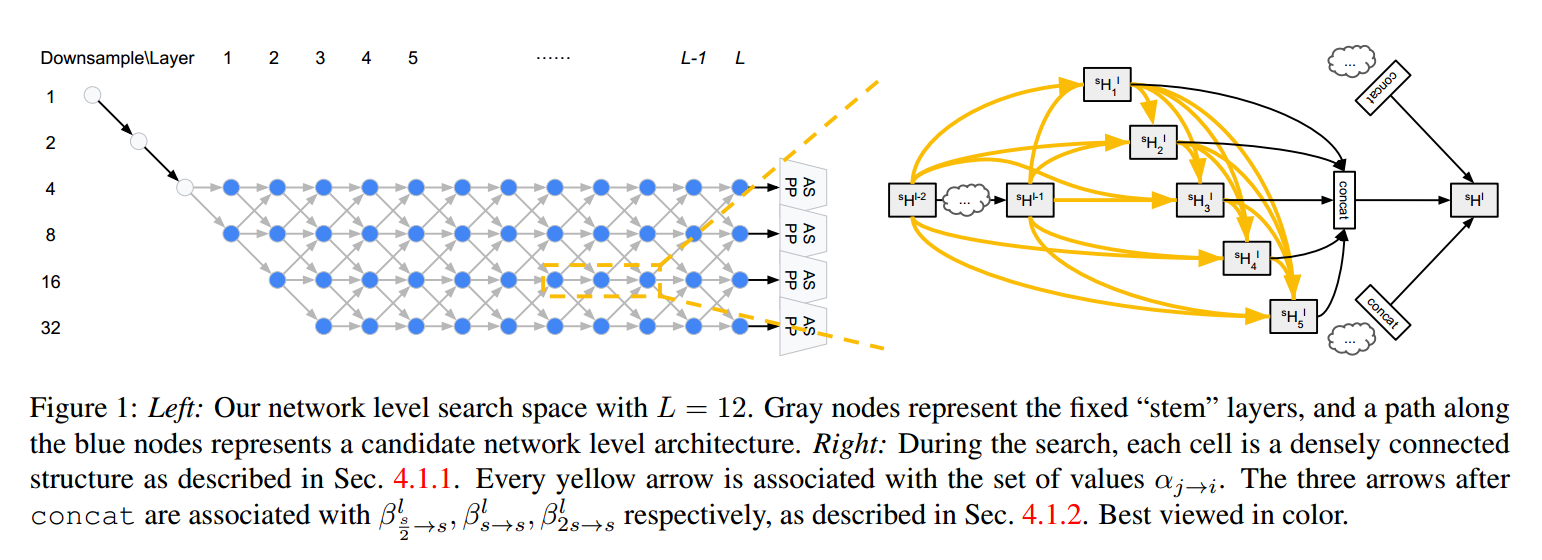
在图 2 中,我们表明:作者所提出的 search space 是一种 general 的方法,足够 cover 到很多流行的网络设计。在未来工作中,作者打算将该搜索空间,拓展到甚至包含 U-Net 结构。
由于本文既考虑了 cell level architecture ,又考虑到了 cell level architecture,所以,我们的搜索任务,相对于前人的工作,则更加具有挑战性以及 general。

4. Methods:
我们首先介绍 a continuous relaxation of the discrete architecture,然后介绍如何如何通过优化来实现结构化搜索,然后是在搜索结束后,如何编码回一个离散的结构。
4.1 Continuous Relaxation of Architecture:
4.1.1 Cell Architecture:
作者采用前人提出的连续松弛,每一个 block 的输出向量是和所有的 hidden states 相连的:
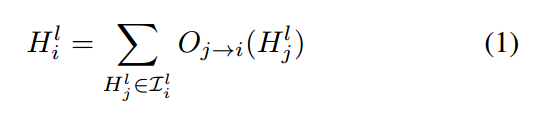
此外,我们用其连续的松弛 $\hat{O_{j->i}}$ 来估计每一个 $O_{j->i}$ ,其定义如下:

其中,

另外, 是 normalized scalars associated with each operator, 用 softmax 函数可以很容易的实现。
是 normalized scalars associated with each operator, 用 softmax 函数可以很容易的实现。
回顾 3.1 小节,我们得到 cell level update 的方式:

4.2 Network Archtiecture:
在一个 cell 中,所有的 tensor 都拥有相同的 spatial size,以确保公式(1, 2)中加权求和。然而,就像图 1所示,tensors 可能在 network level 包含不同的 size,所以,为了设置连续的松弛,每一个 layer l 将会最多包含四个 hidden states ,上标符号表示 spatial resolution。
,上标符号表示 spatial resolution。
我们设计 network level 连续松弛,以准确的匹配搜索空间。我们给图 1 的每一个灰色的箭头加一个 scalar,于是,network level 的 update 可以定义为:

其中,s = 4, 8, 16, 32 and l = 1,2, ... , L. 参数 $\beta$ 归一下如下:

也是用 softmax 的方式进行。
公式(6)表明如何将 two-level hierarchical 的连续松弛进行集合。特别的,$\beta$ 控制着 the outer network level,所以,依赖于空间尺寸和 layer index。$\beta$ 的每个 scalar 都控制了一个完整的 $\alpha$ 集合,然而 $\alpha$ 指定了 the same architecure that depends on neither spatial size nor layer index。
如图 1 所示,ASPP (Astrous Spatial Pyramid Pooling)modules 对 第 L-th layer 的每一个空间分辨率的都链接了(atrous rates 可以调整)。他们的输出,在 sum 之前,是 bilinear upsample 到原始的分辨率,以产生预测。
4.2 Optimization:
将该连续的松弛引入进来的优势是:这些 scalar 控制了不同隐层状态的链接强度(controlling the connection stength between different hidden states),are now part of the differentiable computation graph. 所以,这可以通过 gradient descent 的方法来进行有效的优化。作者采用 first-order approximation,将训练数据分为两个集合 trainA 和 trainB。其依次优化过程如下:

其中,损失函数 L 是依赖于语义分割的交叉熵。
4.3 Decoding Discrete Architecture:
Cell Architecture: 作者解码该离散 cell architecture,首先,对每一个 block,保持 2 个最强的 predecessors,然后,通过 argmax 来选择最像的操作符。
Network Architecture:公式(7)表明:the "outgoing probability" at each of the blue nodes in Fig. 1 sums to 1. 实际上,$\beta$ 值可以表示为:沿着不同“时间步骤(layer number)”,不同“state”(Spatial resolution)之间的转移概率(“transition probability”)。直观的来说,我们的目标是:从头到尾,找到一个 path,使其获得最大化的概率(maximum probability)。该路径可以有效的通过 the classic Viterbi algorithm,来进行解码。
5. Experimental Results:
在本节中,作者首先介绍了接收搜索的具体实现细节,以及搜索的结果。然后,介绍了语义分割在多个benchmark 数据集上的结果。
5.1 Architecture Search Implementation Details:
作者考虑到 12 层的网络,并且设置一个 cell 中的 B = 5 blocks,该 network level search space 有 $2.9*10^4$ 个独特的 path,cell structure 的个数为 $5.6*10^{14}$。所以,联合的,等级搜索空间的大小为 $10^{19}$。
作者采用常用的套路,即:double the number of filters,当降低 feature tensor 的 width 和 height 时。图1中的每个绿色节点,都有 downsample rate s,拥有 B*F*s output filters,其中,F 是 filter multiplier 控制着模型的容量。在结构搜索的过程中,我们设置 F = 8。stride 为 2 的 convolution 被用于所有的 s/2 到 s 的连接,都用于降低分辨率大小 和 增加滤波器的个数。在 1*1 的卷积后,用 bilinear upsampling 来用于 2s -> s 的链接,都用于增加分辨率 和 降低滤波器的个数。
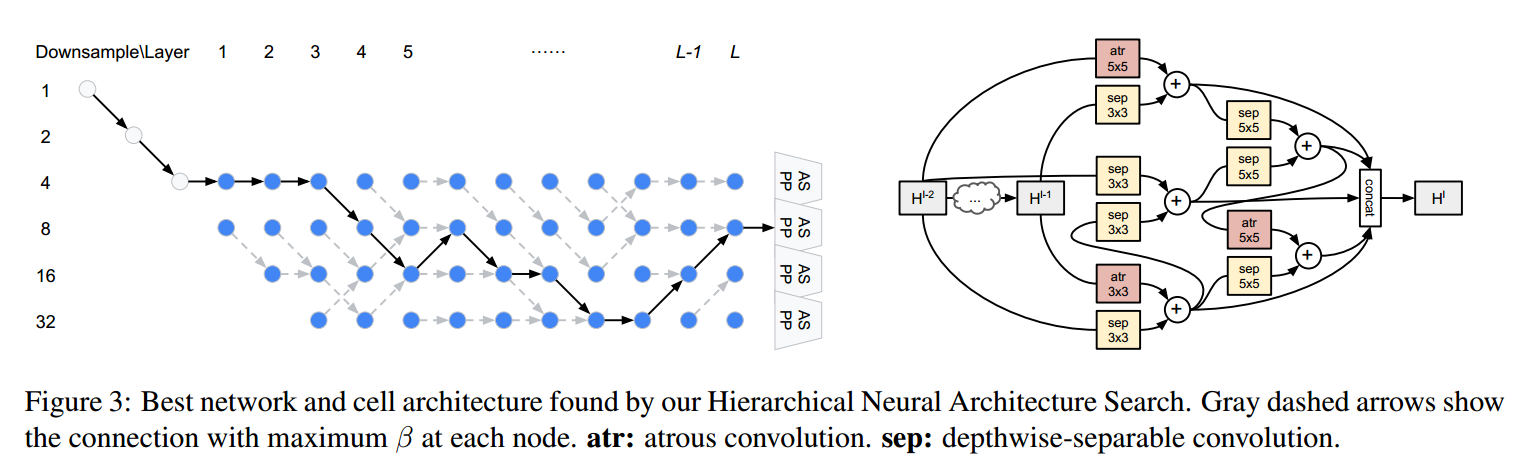
ASPP module 拥有 5 个分支:one 1*1 convolution, three 3*3 convolution (不同的空洞率),以及 pooled image feature. 在搜索的过程中,我们简化 ASPP 使其拥有 3 branches,通过仅适用一个 3*3 convolution (空洞率为 96/s)。每个 ASPP 分支产生的滤波器的个数为 B*F*s。
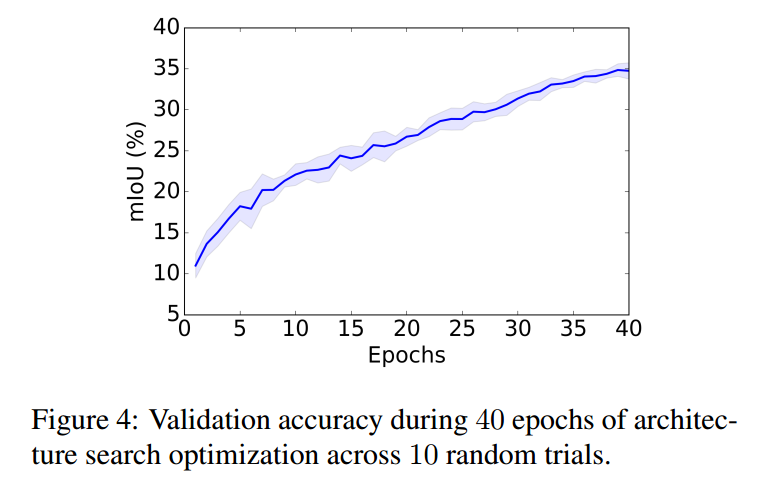
我们在 Cityscapes dataset 上进行网络结构的搜索进行语义分割。具体来说,作者随机的从 512*1024 的图像上裁剪出 321*312 的图像。然后随机的从 train_fine 中选择一般图像放到 trainA 中,剩下的一般作为 trainB。本文的一个亮点是:整个网络结构的搜索过程仅仅在 P100 GPU 上搜索一天就完成了。作者尝试了优化更多的时间,但是并未见到效果有显著的提升。图4,展示了 验证集精度的稳定变化曲线。
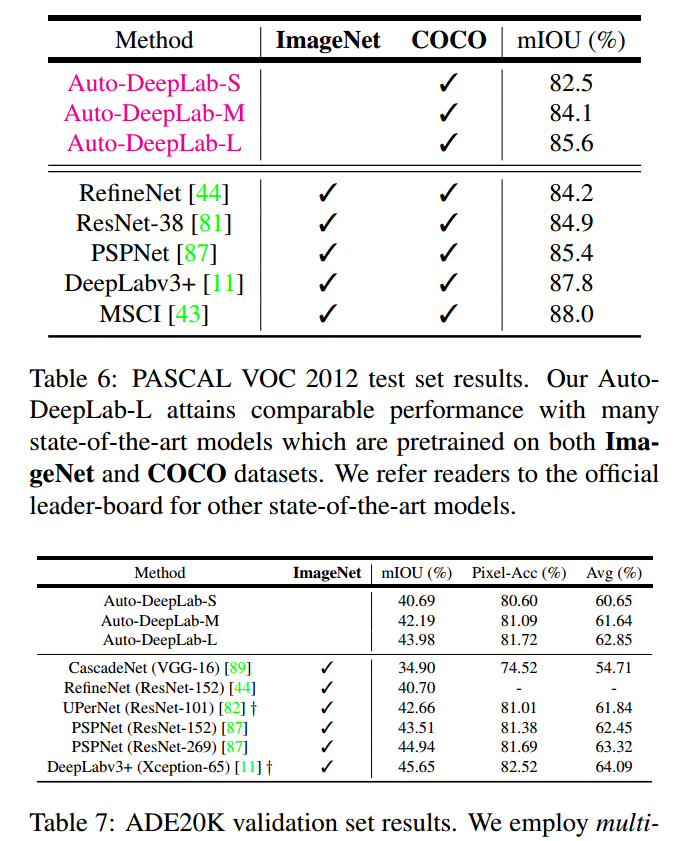
5.2 语义分割结果:


==
论文笔记:Auto-DeepLab: Hierarchical Neural Architecture Search for Semantic Image Segmentation的更多相关文章
- 论文笔记系列-Auto-DeepLab:Hierarchical Neural Architecture Search for Semantic Image Segmentation
Pytorch实现代码:https://github.com/MenghaoGuo/AutoDeeplab 创新点 cell-level and network-level search 以往的NAS ...
- 论文笔记:ProxylessNAS: Direct Neural Architecture Search on Target Task and Hardware
ProxylessNAS: Direct Neural Architecture Search on Target Task and Hardware 2019-03-19 16:13:18 Pape ...
- 论文笔记系列-Simple And Efficient Architecture Search For Neural Networks
摘要 本文提出了一种新方法,可以基于简单的爬山过程自动搜索性能良好的CNN架构,该算法运算符应用网络态射,然后通过余弦退火进行短期优化运行. 令人惊讶的是,这种简单的方法产生了有竞争力的结果,尽管只需 ...
- 告别炼丹,Google Brain提出强化学习助力Neural Architecture Search | ICLR2017
论文为Google Brain在16年推出的使用强化学习的Neural Architecture Search方法,该方法能够针对数据集搜索构建特定的网络,但需要800卡训练一个月时间.虽然论文的思路 ...
- 论文笔记系列-Neural Architecture Search With Reinforcement Learning
摘要 神经网络在多个领域都取得了不错的成绩,但是神经网络的合理设计却是比较困难的.在本篇论文中,作者使用 递归网络去省城神经网络的模型描述,并且使用 增强学习训练RNN,以使得生成得到的模型在验证集上 ...
- 论文笔记:Fast Neural Architecture Search of Compact Semantic Segmentation Models via Auxiliary Cells
Fast Neural Architecture Search of Compact Semantic Segmentation Models via Auxiliary Cells 2019-04- ...
- 论文笔记:Progressive Neural Architecture Search
Progressive Neural Architecture Search 2019-03-18 20:28:13 Paper:http://openaccess.thecvf.com/conten ...
- (转)Illustrated: Efficient Neural Architecture Search ---Guide on macro and micro search strategies in ENAS
Illustrated: Efficient Neural Architecture Search --- Guide on macro and micro search strategies in ...
- 小米造最强超分辨率算法 | Fast, Accurate and Lightweight Super-Resolution with Neural Architecture Search
本篇是基于 NAS 的图像超分辨率的文章,知名学术性自媒体 Paperweekly 在该文公布后迅速跟进,发表分析称「属于目前很火的 AutoML / Neural Architecture Sear ...
随机推荐
- css table之合并单元格
colspan 是合并列,rowspan是合并行,合并行的时候,比如rowspan="2",它的下一行tr会少一列:合并列的时候 colspan="2",此行的 ...
- Python004-数据处理示例:以某个数据(字段)为基准从数据中获取不同的字段行数
数据源样式如下所示: 需求: 读取文本,以第一列为基准参考系,每个基准仅输出满足需要条数的数据:不满足,全部输出. 比如,基准为 6236683970000018780,输出条数要求为 5.若文本中含 ...
- Hibernate处理事务并发问题
在Hibernate中设置事务的隔离级别.<property name="hibernate.connection.isolation">2</property& ...
- opencart3调用三级菜单level 3 sub categories
Opencart 3的menu菜单默认只调用一级和二级菜单,但很多电商网站类目复杂,三级菜单一般都是需要的,甚至更深,那么如何调用三级菜单level 3 sub categories呢?ytkah有一 ...
- oracle储存过程学习笔记
转载至: https://www.2cto.com/database/201610/559389.htm 1.什么是oracle存储过程 存储过程和函数也是一种PL/SQL块,是存入数据库的PL/SQ ...
- Java面试题和解答(三)
1.这段代码大多数情况下运行正常,但是某些情况下会出问题.什么时候会出现什么问题?如何修正? public class MyStack { private List<String> lis ...
- 小程序wx:for Do not set same key \"NaN\" in wx:key.
在使用wx:for的时候出现了Do not set same key \"NaN\" in wx:key. 去网上查看资料,说是使用wx:key 试了一下,没用 字面意思是不要设置 ...
- shunting-yard 调度场算法、中缀表达式转逆波兰表达式
中缀表达式 1*(2+3) 这就是一个中缀表达式,运算符在数字之间,计算机处理前缀表达式和后缀表达式比较容易,但处理中缀表达式却不太容易,因此,我们需要使用shunting-yard Algorith ...
- Machine Learning 第三周
ML week3 逻辑回归 Logistic Function h_\theta(x)=g(\theta^Tx) g(t)=\frac{1}{1+e^{-z}} 当t大于0, 即下面公式成立时,y=1 ...
- Hadoop Mapreduce中shuffle 详解
MapReduce 里面的shuffle:描述者数据从map task 输出到reduce task 输入的这段过程 Shuffle 过程: 首先,map 输出的<key,value > ...