漫谈 SLAM 技术(上)
欢迎大家前往腾讯云社区,获取更多腾讯海量技术实践干货哦~
作者:解洪文
导语
随着最近几年机器人、无人机、无人驾驶、VR/AR的火爆,SLAM技术也为大家熟知,被认为是这些领域的关键技术之一。本文对SLAM技术及其发展进行简要介绍,分析视觉SLAM系统的关键问题以及在实际应用中的难点,并对SLAM的未来进行展望。
1. SLAM技术
SLAM(Simultaneous Localization and Mapping),同步定位与地图构建,最早在机器人领域提出,它指的是:机器人从未知环境的未知地点出发,在运动过程中通过重复观测到的环境特征定位自身位置和姿态,再根据自身位置构建周围环境的增量式地图,从而达到同时定位和地图构建的目的。由于SLAM的重要学术价值和应用价值,一直以来都被认为是实现全自主移动机器人的关键技术。
如下图,通俗的来讲,SLAM回答两个问题:“我在哪儿?”“我周围是什么?”,就如同人到了一个陌生环境中一样,SLAM试图要解决的就是恢复出观察者自身和周围环境的相对空间关系,“我在哪儿”对应的就是定位问题,而“我周围是什么”对应的就是建图问题,给出周围环境的一个描述。回答了这两个问题,其实就完成了对自身和周边环境的空间认知。有了这个基础,就可以进行路径规划去达要去的目的地,在此过程中还需要及时的检测躲避遇到的障碍物,保证运行安全。
2. SLAM发展简介
自从上世纪80年代SLAM概念的提出到现在,SLAM技术已经走过了30多年的历史。SLAM系统使用的传感器在不断拓展,从早期的声呐,到后来的2D/3D激光雷达,再到单目、双目、RGBD、ToF等各种相机,以及与惯性测量单元IMU等传感器的融合;SLAM的算法也从开始的基于滤波器的方法(EKF、PF等)向基于优化的方法转变,技术框架也从开始的单一线程向多线程演进。下面介绍这些过程中一些代表性的SLAM技术。
(1)激光雷达SLAM发展
基于激光雷达的SLAM(Lidar SLAM)采用2D或3D激光雷达(也叫单线或多线激光雷达),如下图所示。在室内机器人(如扫地机器人)上,一般使用2D激光雷达,在无人驾驶领域,一般使用3D激光雷达。

激光雷达的优点是测量精确,能够比较精准的提供角度和距离信息,可以达到<1°的角度精度以及cm级别的测距精度,扫描范围广(通常能够覆盖平面内270°以上的范围),而且基于扫描振镜式的固态激光雷达(如Sick、Hokuyo等)可以达到较高的数据刷新率(20Hz以上),基本满足了实时操作的需要;缺点是价格比较昂贵(目前市面上比较便宜的机械旋转式单线激光雷达也得几千元),安装部署对结构有要求(要求扫描平面无遮挡)。
激光雷达SLAM建立的地图常常使用占据栅格地图(Ocupanccy Grid)表示,每个栅格以概率的形式表示被占据的概率,存储非常紧凑,特别适合于进行路径规划。
现任Udacity创始人CEO、前Google副总裁、谷歌无人车领导者Sebastian Thrun大神(下图)在他2005年的经典著作《Probabilistic Robotics》一书中详细阐述了利用2D激光雷达基于概率方法进行地图构建和定位的理论基础,并阐述了基于RBPF粒子滤波器的FastSLAM方法,成为后来2D激光雷达建图的标准方法之一GMapping[1][2]的基础,该算法也被集成到机器人操作系统(Robot Operation System,ROS)中。
2013年,文献[3]对ROS中的几种2D SLAM的算法HectorSLAM,KartoSLAM,CoreSLAM,LagoSLAM和GMapping做了比较评估,读者可前往细看。
2016年,Google开源其激光雷达SLAM算法库Cartographer[4],它改进了GMapping计算复杂,没有有效处理闭环的缺点,采用SubMap和Scan Match的思想构建地图,能够有效处理闭环,达到了较好的效果。
(2)视觉SLAM发展
相比于激光雷达,作为视觉SLAM传感器的相机更加便宜、轻便,而且随处可得(如人人都用的手机上都配有摄像头),另外图像能提供更加丰富的信息,特征区分度更高,缺点是图像信息的实时处理需要很高的计算能力。幸运的是随着计算硬件的能力提升,在小型PC和嵌入式设备,乃至移动设备上运行实时的视觉SLAM已经成为了可能。
视觉SLAM使用的传感器目前主要有单目相机、双目相机、RGBD相机三种,其中RGBD相机的深度信息有通过结构光原理计算的(如Kinect1代),也有通过投射红外pattern并利用双目红外相机来计算的(如Intel RealSense R200),也有通过TOF相机实现的(如Kinect2代),对用户来讲,这些类型的RGBD都可以输出RGB图像和Depth图像。

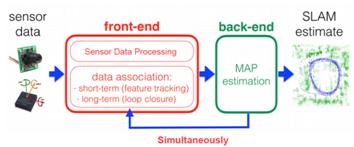
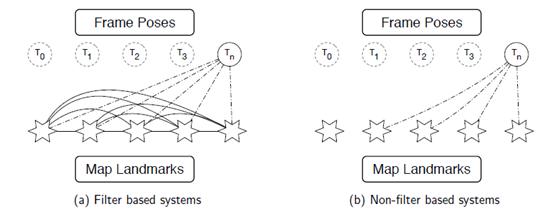
现代流行的视觉SLAM系统大概可以分为前端和后端,如下图所示。前端完成数据关联,相当于VO(视觉里程计),研究帧与帧之间变换关系,主要完成实时的位姿跟踪,对输入的图像进行处理,计算姿态变化,同时也检测并处理闭环,当有IMU信息时,也可以参与融合计算(视觉惯性里程计VIO的做法);后端主要对前端的输出结果进行优化,利用滤波理论(EKF、PF等)或者优化理论进行树或图的优化,得到最优的位姿估计和地图。
采用滤波器的SLAM,如下图(a),估计n时刻的相机位姿Tn需要使用地图中所有路标的信息,而且每帧都需要更新这些路标的状态,随着新的路标的不断加入,状态矩阵的规模增长迅速,导致计算和求解耗时越来越严重,因此不适宜长时间大场景的操作;而采用优化算法的SLAM,如下图(b),通常结合关键帧使用,估计n时刻的相机位姿Tn可以使用整个地图的一个子集,不需要在每幅图像都更新地图数据,因此现代比较成功的实时SLAM系统大都采取优化的方法。
下面介绍视觉SLAM发展历程中几个比较有代表性的SLAM系统进行介绍:
MonoSLAM[5]是2007年由Davison 等开发的第一个成功基于单目摄像头的纯视觉SLAM 系统。MonoSLAM使用了扩展卡尔曼滤波,它的状态由相机运动参数和所有三维点位置构成, 每一时刻的相机方位均带有一个概率偏差,每个三维点位置也带有一个概率偏差, 可以用一个三维椭球表示, 椭球中心为估计值, 椭球体积表明不确定程度(如下图所示),在此概率模型下, 场景点投影至图像的形状为一个投影概率椭圆。MonoSLAM 为每帧图像中抽取Shi-Tomasi角点[6], 在投影椭圆中主动搜索(active search)[7]特征点匹配。由于将三维点位置加入估计的状态变量中,则每一时刻的计算复杂度为O(n3) , 因此只能处理几百个点的小场景。

同年,Davison在Oxford的师父Murray和Klein发表了实时SLAM系统PTAM(Parallel Tracking and Mapping)[8]并开源(如下图),它是首个基于关键帧BA的单目视觉SLAM 系统, 随后在2009 年移植到手机端上[9]。PTAM在架构上做出了创新的设计,它将姿态跟踪(Tracking)和建图(Mapping)两个线程分开并行进行,这在当时是一个创举,第一次让大家觉得对地图的优化可以整合到实时计算中,并且整个系统可以跑起来。这种设计为后来的实时SLAM(如ORB-SLAM)所效仿,成为了现代SLAM系统的标配。具体而言,姿态跟踪线程不修改地图,只是利用已知地图来快速跟踪;而建图线程专注于地图的建立、维护和更新。即使建立地图线程耗时稍长,姿态跟踪线程仍然有地图可以跟踪(如果设备还在已建成的地图范围内)。此外,PTAM还实现丢失重定位的策略,如果成功匹配点(Inliers)数不足(如因图像模糊、快速运动等)造成跟踪失败时,则开始重定位[10]——将当前帧与已有关键帧的缩略图进行比较,选择最相似的关键帧作为当前帧方位的预测。

2011年,Newcombe 等人提出了单目DTAM 系统[11], 其最显著的特点是能实时恢复场景三维模型(如下图)。基于三维模型,DTAM 既能允许AR应用中的虚拟物体与场景发生物理碰撞,又能保证在特征缺失、图像模糊等情况下稳定地直接跟踪。DTAM采用逆深度(Inverse Depth)[12]方式表达深度。如下图,DTAM将解空间离散为M×N×S 的三维网格,其中M× N为图像分辨率,S为逆深度分辨率,采用直接法构造能量函数进行优化求解。DTAM 对特征缺失、图像模糊有很好的鲁棒性,但由于DTAM 为每个像素都恢复稠密的深度图, 并且采用全局优化,因此计算量很大,即使采用GPU 加速, 模型的扩展效率仍然较低。

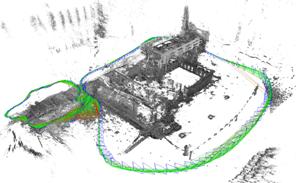
2013年,TUM机器视觉组的Engel 等人提出了一套同样也是基于直接法的视觉里程计(visual odometry, VO)系统,该系统2014年扩展为视觉SLAM 系统LSD-SLAM[13],并开源了代码。与DTAM相比,LSD-SLAM 仅恢复半稠密深度图(如下图),且每个像素深度独立计算, 因此能达到很高的计算效率。LSD-SLAM 采用关键帧表达场景,每个关键帧K包含图像 Ik、逆深度图Dk和逆深度的方差Vk。系统假设每个像素x的逆深度值服从高斯分布N(Dk (x),Vk (x))。LSD-SLAM 的前台线程采用直接法计算当前帧t与关键帧k之间相对运动,后台线程对关键帧中每个半稠密抽取的像素点x(梯度显著区域), 在It中沿极线搜索Ik (x)的对应点, 得到新的逆深度观测值及其方差,然后采用EKF更新Dk和Vk 。LSD-SLAM采用位姿图优化来闭合回环和处理大尺度场景。2015年,Engel等人对LSD-SLAM进行了功能拓展,使其能够支持双目相机[14]和全景相机[15]。
2014年,苏黎世大学机器人感知组的Forster等人提出开源的SVO系统[16],该系统对稀疏的特征块使用直接法配准(Sparse Model-based Image Alignment),获取相机位姿,随后根据光度不变假设构造优化方程对预测的特征位置进行优化(Feature Alignment),最后对位姿和结构进行优化(Motion-only BA和Structure-only BA),而在深度估计方面,构造深度滤波器,采用一个特殊的贝叶斯网络[17]对深度进行更新。SVO的一个突出优点就是速度快,由于使用了稀疏的图像块,而且不需要进行特征描述子的计算,因此它可以达到很高的速度(作者在无人机的嵌入式ARM Cortex A9 4核1.6Ghz处理器平台上可以达到55fps的速度),但是SVO缺点也很明显,它没有考虑重定位和闭环,不算是一个完整意义上的SLAM系统,丢失后基本就挂了,而且它的Depth Filter收敛较慢,结果严重地依赖于准确的位姿估计;2016年,Forster对SVO进行改进,形成SVO2.0[18]版本,新的版本做出了很大的改进,增加了边缘的跟踪,并且考虑了IMU的运动先验信息,支持大视场角相机(如鱼眼相机和反射式全景相机)和多相机系统,该系统目前也开源了可执行版本[19];值得一提的是,Foster对VIO的理论也进行了详细的推导,相关的文献[20]成为后续SLAM融合IMU系统的理论指导,如后面的Visual Inertial ORBSLAM等系统。
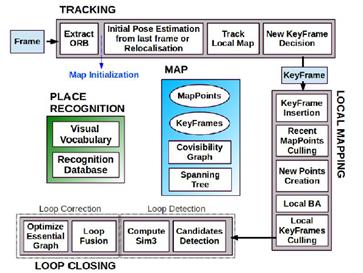
2015年,Mur-Artal 等提出了开源的单目ORB-SLAM[21],并于2016年拓展为支持双目和RGBD传感器的ORB-SLAM2[22],它是目前支持传感器最全且性能最好的视觉SLAM系统之一,也是所有在KITTI数据集上提交结果的开源系统中排名最靠前的一个[23]。ORB-SLAM 延续了PTAM 的算法框架,增加了单独的回环检测线程,并对框架中的大部分组件都做了改进,归纳起来主要有以下几点:1)ORB-SLAM追踪、建图、重定位和回环检测各个环节都使用了统一的ORB 特征[24],使得建立的地图可以保存载入重复利用;2)得益于共视图(convisibility graph)的使用,将跟踪和建图操作集中在一个局部互见区域中,使其能够不依赖于整体地图的大小,能够实现大范围场景的实时操作;3)采用统一的BoW词袋模型进行重定位和闭环检测,并且建立索引来提高检测速度;4)改进了PTAM只能手工选择从平面场景初始化的不足,提出基于模型选择的新的自动鲁棒的系统初始化策略,允许从平面或非平面场景可靠地自动初始化。后来,Mur-Artal又将系统进行了拓展,形成了融合IMU信息的Visual Inertial ORB-SLAM[25],采用了Foster的论文[]提出的预积分的方法,对IMU的初始化过程和与视觉信息的联合优化做了阐述。
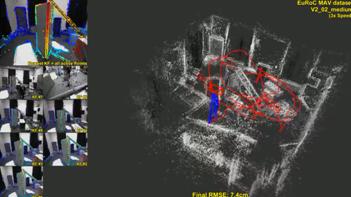
2016年,LSD-SLAM的作者,TUM机器视觉组的Engel等人又提出了DSO系统[26]。该系统是一种新的基于直接法和稀疏法的视觉里程计,它将最小化光度误差模型和模型参数联合优化方法相结合。为了满足实时性,不对图像进行光滑处理,而是对整个图像均匀采样。DSO不进行关键点检测和特征描述子计算,而是在整个图像内采样具有强度梯度的像素点,包括白色墙壁上的边缘和强度平滑变化的像素点。而且,DSO提出了完整的光度标定方法,考虑了曝光时间,透镜晕影和非线性响应函数的影响。该系统在TUM monoVO、EuRoC MAV和ICL-NUIM三个数据集上进行了测试,达到了很高的跟踪精度和鲁棒性。
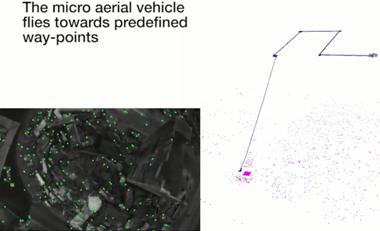
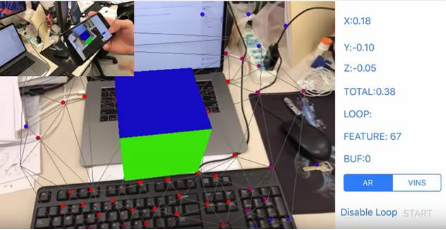
2017年,香港科技大学的沈绍劼老师课题组提出了融合IMU和视觉信息的VINS系统[27],同时开源手机和Linux两个版本的代码,这是首个直接开源手机平台代码的视觉IMU融合SLAM系统。这个系统可以运行在iOS设备上,为手机端的增强现实应用提供精确的定位功能,同时该系统也在应用在了无人机控制上,并取得了较好的效果。VINS-Mobile使用滑动窗口优化方法,采用四元数姿态的方式完成视觉和IMU融合,并带有基于BoW的闭环检测模块,累计误差通过全局位姿图得到实时校正。
推荐阅读
此文已由作者授权腾讯云技术社区发布,转载请注明原文出处
漫谈 SLAM 技术(上)的更多相关文章
- (转) SLAM系统的研究点介绍 与 Kinect视觉SLAM技术介绍
首页 视界智尚 算法技术 每日技术 来打我呀 注册 SLAM系统的研究点介绍 本文主要谈谈SLAM中的各个研究点,为研究生们(应该是博客的多数读者吧)作一个提纲挈领的摘要.然后,我 ...
- SLAM技术在国内的发展现状
近年来,由于扫地机的出现使得SLAM技术名声大噪,如今,已在机器人.无人机.AVG等领域相继出现它的身影,今天就来跟大家聊一聊国内SLAM的发展现状. SLAM的多领域应用 SLAM应用领域广泛,按其 ...
- 服务机器人的小脑——SLAM技术
博客转载自:https://www.leiphone.com/news/201706/DZlMscTwdIzFyodg.html 雷锋网(公众号:雷锋网)按:本文作者SLAMTEC(思岚科技公号sla ...
- 机器人自主移动的秘密,从SLAM技术说起(一)
博客转载自:https://www.leiphone.com/news/201609/c35bn1M9kgVaCCef.html 雷锋网(公众号:雷锋网)按:本文作者SLAMTEC(思岚科技公号sla ...
- 视觉SLAM技术应用
视觉SLAM技术应用 SLAM技术背景 SLAM技术全称Simultaneous localization and mapping,中文为"同时定位与地图构建".SLAM可以在未知 ...
- 以雅酷网为实例从技术上说说dedecms的seo优化要注意哪些?
目前在做雅酷网 ,雅酷卡是雅酷时空公司的产品,我个人感觉用雅酷卡消费还是比较实惠的,而雅酷卡的特色便是雅酷健身卡,很多站长成天的趴电脑上,可以考虑办一张这样的卡,在周末的时候去健身中心活动活动,还是比 ...
- Web前端-Ajax基础技术(上)
Web前端-Ajax基础技术(上) ajax是浏览器提供一套的api,用于向服务器发出请求,接受服务端返回的响应,通过javascript调用,实现通过代码控制请求与响应,实现网络编程. ajax发送 ...
- 驳《编码规范是技术上的遮羞布》自由发挥==摆脱编码规范?X
引子: 看了一坨文字<编码规范是技术上的遮羞布>,很是上火,见人见智,本是无可厚非,却深感误人子弟者众.原文观点做一个简单的提炼: 1.扔掉编码规范吧,让程序员自由发挥,你会得到更多的好处 ...
- (转)Oracle与DB2在数据库高可用技术上的相同与差异探讨
原文:http://www.talkwithtrend.com/Article/178339 数据库建设过程中,高可用是每一个企业数据中心数据库建设过程中至关重要的一个关注点,直接关系到业务连续性和稳 ...
随机推荐
- [extjs(1)]MyEclipse2014安装ext4插件Spket
1 解压好的Spket目录如下 2 建议以link方式安装Spket到MyEclipse中 找到MyEclipse的安装目录 如 3 在MyEclipse 的根目录新建一个目录extjs 当然也可 ...
- Java基础-Eclipse环境搭建(02)
Eclipse工具 IDE(Integrated Development Environment)集成开发环境集成了编写功能,分析功能,编译功能一体化的开发软件. 调试功能等,其中编译在保存时运行(即 ...
- R-kmeans聚类算法
K-means也是聚类算法中最简单的一种了,但是里面包含的思想却是不一般.最早我使用并实现这个算法是在学习韩爷爷那本数据挖掘的书中,那本书比较注重应用.看了Andrew Ng的这个讲义后才有些明白K- ...
- Red and Black
Problem Description There is a rectangular room, covered with square tiles. Each tile is colored eit ...
- HDU Today
HDU Today Time Limit: 15000/5000 MS (Java/Others) Memory Limit: 32768/32768 K (Java/Others) Total Su ...
- 验证Oracle处理速度
(这是2009年写的东西了,在网上看到有人对数据库批量操作的'速度'比较关注,于是就把这篇老文章整理了一下) 一.环境及前提 在244上(一台稍好一些的机器,做了RAID,机械硬盘,Raid几忘了), ...
- Android开发之漫漫长途 Ⅰ——Android系统的创世之初以及Activity的生命周期
该文章是一个系列文章,是本人在Android开发的漫漫长途上的一点感想和记录,我会尽量按照先易后难的顺序进行编写该系列.该系列引用了<Android开发艺术探索>中的相关知识,再次表示该书 ...
- PHP静态化技术
很多框架的模板引擎都有页面静态化的功能 目的是为了优化网站运行时间 静态化分两种 纯静态和伪静态 一. 纯静态 纯静态展示的是实实在在的静态页面 运行PHP程序 判断是否存在静态页 如果存在 展示 ...
- OpenCV畸变校正源代码分析
图像算法中会经常用到摄像机的畸变校正,有必要总结分析OpenCV中畸变校正方法,其中包过普通针孔相机模型和鱼眼相机模型fisheye两种畸变校正方法. 普通相机模型畸变校正函数针对OpenCV中的cv ...
- 你有什么理由还不选择阿里云服务器呢--从阿里云发布自研商用关系型数据库POLARDB想到的
最近几天,阿里云发布自研商用关系型数据库POLARDB的消息可谓是重磅炸弹啊.借用官方宣传的话就是:6倍性能于MySQL并100%兼容/100TB存储容量/2分钟创建只读副本/3分钟创建容灾实例,第三 ...