Coursera self-driving2, State Estimation and Localization Week2, kalman filter 卡尔曼滤波
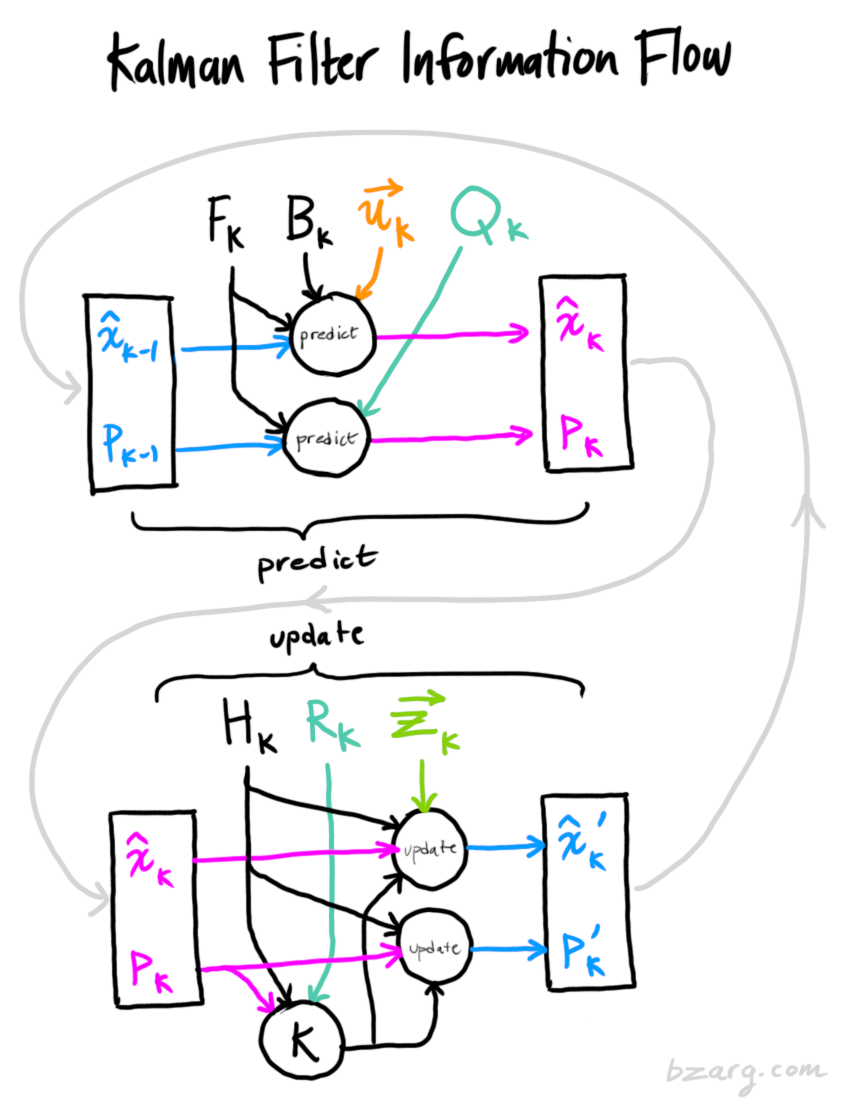
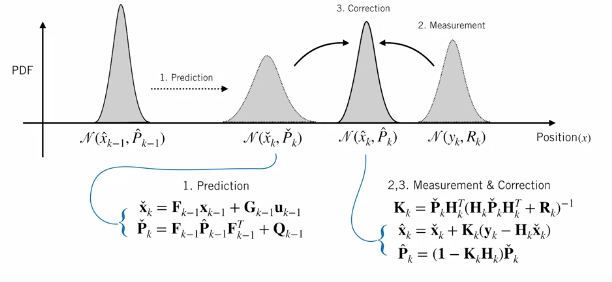
KF - Kalman Filter:
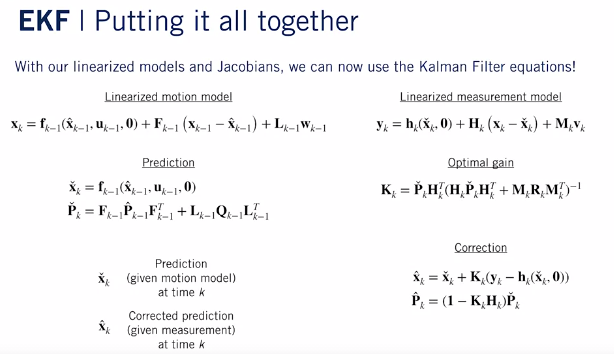
EKF - Extended Kalman Filter:
ES-EKF - Error State Extended Kalman Filter
和EKF一样,用的是 local linearization

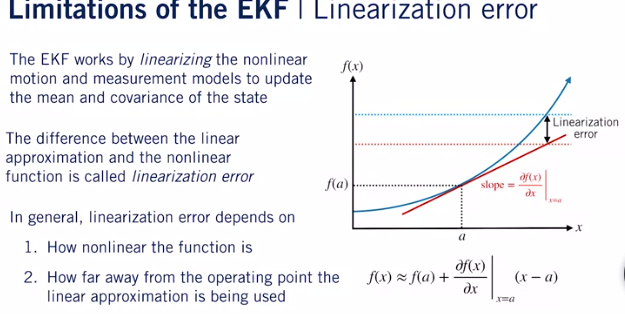
EKF的限制:系统非常的非线性,用线性模拟很不准确. 作者举例极坐标转成笛卡尔坐标就是一种很不线性化的转换,用线性模拟就不行,不收敛
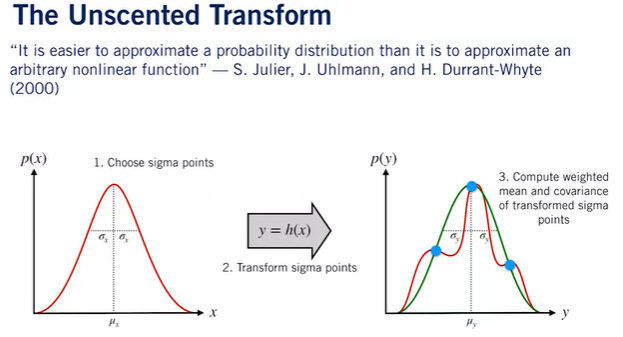
Unscented Kalman Filter - UKF
这个就是解决上面的问题的, 它更精确,而且不需要算jacobian矩阵
Summary:

Ref:
- http://www.bzarg.com/p/how-a-kalman-filter-works-in-pictures/ 图文并茂好文章, amazing!!!
- 最小二乘法的本质是什么?
Coursera self-driving2, State Estimation and Localization Week2, kalman filter 卡尔曼滤波的更多相关文章
- State Estimation for Robotics (Tim Barfoot) exercises Answers
Here are some exercises answers for State Estimation for Robotics, which I did in June, 2017. The bo ...
- 泡泡一分钟:Robust Attitude Estimation Using an Adaptive Unscented Kalman Filter
张宁 Robust Attitude Estimation Using an Adaptive Unscented Kalman Filter 使用自适应无味卡尔曼滤波器进行姿态估计链接:https: ...
- Coursera, Deep Learning 4, Convolutional Neural Networks - week2
Case Study (Note: 红色表示不重要) LeNet-5 起初用来识别手写数字灰度图片 AlexNet 输入的是227x227x3 的图片,输出1000 种类的结果 VGG VGG比Ale ...
- state estimation for robotics-1
概率论是探讨SLAM的一个重要的工具,概率密度函数的概率意义在于它能够描述一个随机变量位于任意区间的概率. p(x<=x<=x+dx)≍p(x).dx(由拉格朗日中值定理)
- 卡尔曼滤波器【Kalman Filter For Dummies】
搬砖到此: A Quick Insight As I mentioned earlier, it's nearly impossible to grasp the full meaning o ...
- Sensor fusion(传感器融合)
From Wikipedia, the free encyclopedia 来自维基百科,免费的百科Sensor fusion is combining of sensory data or data ...
- QuantStart量化交易文集
Over the last seven years more than 200 quantitative finance articles have been written by members o ...
- (转) How a Kalman filter works, in pictures
How a Kalman filter works, in pictures I have to tell you about the Kalman filter, because what it d ...
- Kalman实际应用总结
目录 Kalman理论介绍 一. 简单理论介绍理论 二. 升华理论介绍 Kalman基本应用 一. Kalman跟踪/滤波 二. Kalman预测/融合(单传感器) 三. Kalman多传感器融合A ...
- A Multi-Sensorial Simultaneous Localization and Mapping (SLAM) System for Low-Cost Micro Aerial Vehicles in GPS-Denied Environments
A Multi-Sensorial Simultaneous Localization and Mapping (SLAM) System for Low-Cost Micro Aerial Vehi ...
随机推荐
- Linux Shell 常用命令 - 01篇
系列文章: Linux Shell 常用命令 - 02篇 0. 在线使用 Linux Shell 参考 https://www.sohu.com/a/343421845_298038 JS/UIX - ...
- 关于Precision,Recall,ROC曲线,KS,Lift等模型评价指标的介绍
1.Precision, Recall 准确率 \(Accuracy = \frac{TP+TN}{TP+TN+FP+FN}\) 精确率(或命中率) \(Precision = \frac{TP}{T ...
- Solo 开发者周刊 (第8期):Claude公司再度上新产品,成交额将超73亿美元
这里会整合 Solo 社区每周推广内容.产品模块或活动投稿,每周五发布.在这期周刊中,我们将深入探讨开源软件产品的开发旅程,分享来自一线独立开发者的经验和见解.本杂志开源,欢迎投稿. 好文推荐 Cla ...
- TP5系列 | Queue消息队列
消费信息如下ThinkPHP5 Queue消息队列 优点 1.Queue内置了 Redis,Database,Topthink ,Sync这四种驱动,本文使用Redis驱动 2.Queue消息队列适用 ...
- Python 在PDF中添加、替换、或删除图片
PDF文件中的图片可以丰富文档内容,提升用户的阅读体验.除了在PDF中添加图片外,有时也需要替换或删除其中的图片,以改进视觉效果或更新信息.本文将提供以下三个示例,介绍如何使用Python 操作PDF ...
- 关于在windows系统下使用Linux子系统
今天意外刷到一个短视频,介绍了如何在windows下方便的使用系统自带的Linux子系统,本人抱着好奇的心理,也因为最近碰到了只使用windows操作系统解决不了的问题,还有想到以后测试项目大概率也要 ...
- 【VMware VCF】VMware Cloud Foundation Part 06:部署 VI 工作负载域。
VMware Cloud Foundation 标准架构中,管理域和 VI 工作负载域需要分开部署,管理域是初始构建(Bring-up)中部署的一个工作负载域并且只有一个,管理域专门用于承载管理相关组 ...
- 【Java-GUI】12 Swing07 JList
列表和下拉选择: package cn.dzz; import javax.swing.*; import javax.swing.border.EtchedBorder; import javax. ...
- 【ECharts】01 快速上手
简单介绍: ECharts 是一个使用 JavaScript 实现的开源可视化库,涵盖各行业图表,满足各种需求. ECharts 遵循 Apache-2.0 开源协议,免费商用. ECharts 兼容 ...
- 如何使用工具下载B站非会员视频(下载B站免费web视频)
最近准备从B站上下载几个web页面上的视频,但是B站的视频又没有提供相关的下载工具,于是找到了一款下载B站视频的工具( you-get ), 该工具不能下载会员版的视频,不能下载收费的视频,不过对于免 ...