Ubuntu虚拟机ROS的安装与使用
ROS安装
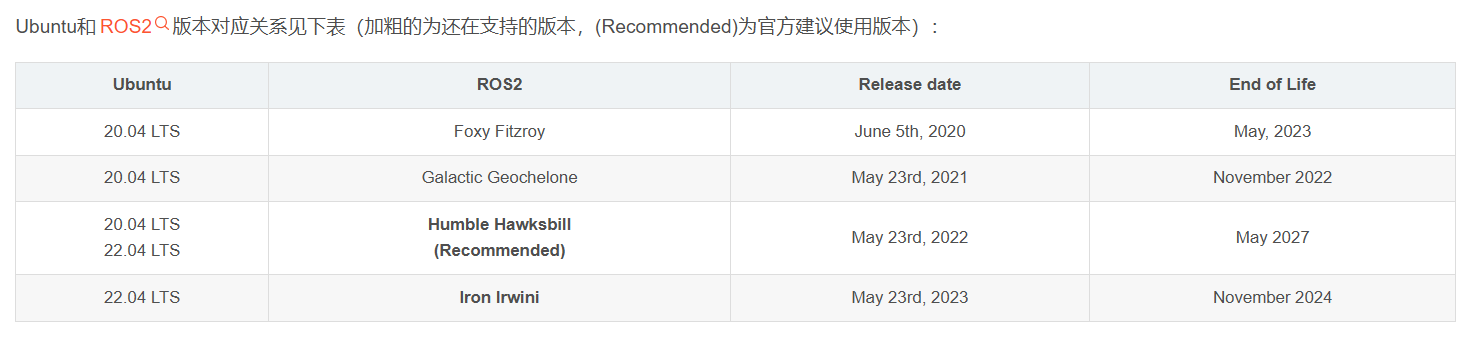
安装ROS2
使用鱼香ROS的一键安装:
wget http://fishros.com/install -O fishros && bash fishros

进行换源操作,这里已经换过源了
选择安装版本对应的,这里已经提前安装好了

安装结束之后需要先初始化如何更新并且source一下环境变量
sudo rosdep init
rosdep update
source ~/.bashrc
安装ROS2之后,打开小乌龟代码: (安装的ros1需要另测)
ros2 run turtlesim turtlesim_node
终端出现小乌龟后,再打开一个新的终端,在里面键盘控制的节点:
ros2 run turtlesim turtle_teleop_key
正如打印信息所述,可以通过键盘上的方向箭头移动小乌龟,可以通过G|B|V|C|D|E|R|T这些按键进行旋转到一个绝对的方向,F取消旋转,Q退出。
Ubuntu虚拟机ROS的安装与使用的更多相关文章
- Ubuntu虚拟机+ROS+Android开发环境配置笔记
Ubuntu虚拟机+ROS+Android开发环境配置笔记 虚拟机设置: 1.本地环境:Windows 7:VMWare:联网 2.虚拟环境 :Ubuntu 14.04. 比較稳定,且支持非常多ROS ...
- 【Tools】ubuntu虚拟机Vmware Tools 安装记录
1.下载VmwareTools 链接: https://pan.baidu.com/s/1c4baji4 密码: h3si 2.终端打开下载文件位置 cd /home/ubuntu/Downloads ...
- 【解决问题】SSH连不上Ubuntu虚拟机解决办法
1. 安装openssh-client Ubuntu默认缺省安装了openssh-client,apt-get安装即可 sudo apt-get install openssh-client 2. 安 ...
- [解决问题]SSH连不上Ubuntu虚拟机解决办法
1. 安装openssh-client Ubuntu默认缺省安装了openssh-client,apt-get安装即可 sudo apt-get install openssh-client 2. 安 ...
- VMware安装ubuntu虚拟机
创建虚拟机完成. 安装操作系统. 中文版界面: 中文版界面: 稍等在重启 重新启动虚拟机. 安装VMtools 双击该图标 安装完成,重新启动系统. 如果在安装的时候,主机名没有修改 看着太长 如何修 ...
- 基于Ubuntu虚拟机安装edx-platform
基于Ubuntu虚拟机安装edx-platform 一. 前提准备 1. 虚拟机中安装Ubuntu12.04,然后再使用Vagrant方式搭建开发环境,请确保这个虚拟机可以使用2GB的内存,否则容 ...
- ubuntu下ROS安装时sudo rosdep init和rosdep update的解决方法
问题: 在ubuntu上多次安装matlab选择合适的版本来调用摄像头,终于把系统搞坏了,重装系统后,ROS无法安装,每次安装到sudo rosdep init和rosdep update报错的问题, ...
- kvm虚拟化管理平台WebVirtMgr部署-完整记录(安装ubuntu虚拟机)-(5)
之前介绍了在webvirtmgr平台下创建centos,windows server 2008的虚拟机,今天说下创建ubuntu虚拟机的过程. (1)首先下载ubuntu16.04的iso镜像放到/u ...
- Ubuntu 虚拟机环境安装配置指南
1. 安装Ubuntu到虚拟机. 到 Ubuntu 上下载桌面版iso文件,加载到虚拟机,开始安装,傻瓜式操作不用多说.2. 调整屏幕分辨率. 虚拟机软件我是用的virtual box,在工具栏上设备 ...
- (亲测成功)在centos7.5上安装kvm,通过VNC远程连接并创建多台ubuntu虚拟机(ubuntu server版本)
在centos7.5上安装kvm,通过VNC远程连接并创建多台ubuntu虚拟机 前提:服务器端安装桌面版的centos系统 CentOS Linux release 7.5.1804 (Core) ...
随机推荐
- windows系统python3.6(Anaconda3)安装对应版本 torch、torchvision
一.官网下载 .whl 文件 https://download.pytorch.org/whl/torch_stable.html 二.使用pip命令安装 打开你的anaconda,选择对应虚拟环境终 ...
- #Dijkstra,二进制拆位#洛谷 5304 [GXOI/GZOI2019]旅行者
题目 分析(\(logk\)次Dijkstra) 首先为什么\(O(nklogn)\)的多次\(dijkstra\)为什么会TLE, 因为中间有许多的冗余状态,即使两点求出的路径是最短的,它也不一定是 ...
- #树形dp#B 预算缩减
题目 给定一棵树,你需要删去一些边(可以不删),使得剩下的图中每个点所在的连通块大小都\(\geq k\). 求删边的方案数,对\(786433\)取模.两种方案不同,当且仅当存在一条边在一个方案中被 ...
- 浅谈OpenHarmony LiteOS-A内核之基础硬件——中断控制器GIC400
一.前言 OpenAtom OpenHarmony(以下简称"OpenHarmony")采用多内核架构,支持Linux内核的标准系统.LiteOS-A的小型系统.LiteOS-M的 ...
- Nacos 无法注册服务
情况描述: Nacos服务搭建完成. 引入了Nacos的依赖. <!-- SpringCloud Alibaba 服务管理 --> <dependency> <group ...
- AI云增强升级!还原生动人像,拍出质感照片
近期不少细心用户发现,在用HUAWEI Mate 60 Pro手机拍照后,使用相册中的AI云增强功能,照片变得更加细腻有质感.这是因为AI云增强升级并更新支持了人像模式拍摄的照片,高清自然的人像细节还 ...
- Windows系统编译libhv带SSL,开启WITH_OPENSSL
需要开发一个https的服务,使用libhv来做,需要重新编译libhv,需要开启 WITH_OPENSSL,前面编译一直很顺利,但是打开VS生成动态库的时候,报错,找不到ssl相关的文件,看了官方的 ...
- 重新整理 .net core 实践篇——— 测试控制器[四十九]
前言 其实就是官方的例子,只是在此收录整理一下. 正文 测试控制器测试的是什么呢? 测试的是避开筛选器.路由.模型绑定,就是只测试控制器的逻辑,但是不测试器依赖项. 代码部分: https://git ...
- linux 性能自我学习 ———— 理解平均负载 [一]
前言 linux 系统上性能调查的自我学习. 正文 什么是平均负载? 使用uptime: 可以看到后面有: 0.03, 0.06, 0.09 这个表示1分钟,5分钟,15分钟的平均负载. 平均负债是指 ...
- mysql 重新整理——索引简介[七]
前言 百度百科索引: 在关系数据库中,索引是一种单独的.物理的对数据库表中一列或多列的值进行排序的一种存储结构,它是某个表中一列或若干列值的集合和相应的指向表中物理标识这些值的数据页的逻辑指针清单. ...