4.7 ROS分布式通信
4.7 ROS分布式通信
ROS是一个分布式计算环境。一个运行中的ROS系统可以包含分布在多台计算机上多个节点。根据系统的配置方式,任何节点可能随时需要与任何其他节点进行通信。
因此,ROS对网络配置有某些要求:
所有端口上的所有机器之间必须有完整的双向连接。
每台计算机必须通过所有其他计算机都可以解析的名称来公告自己。
实现
1.准备
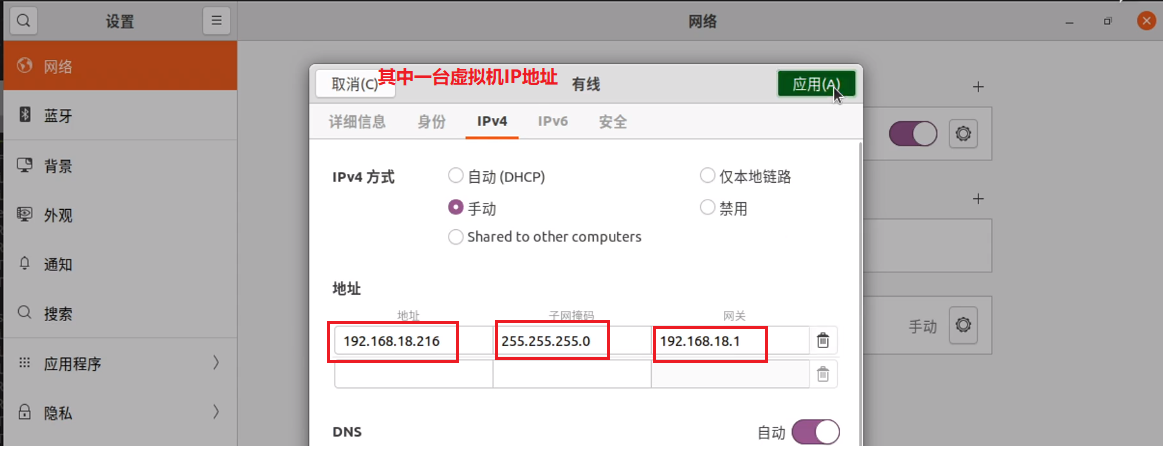
先要保证不同计算机处于同一网络中,最好分别设置固定IP,如果为虚拟机,需要将网络适配器改为桥接模式;

2.配置文件修改
分别修改不同计算机的 /etc/hosts 文件,在该文件中加入对方的IP地址和计算机名:
主机端:
从机的IP 从机计算机名
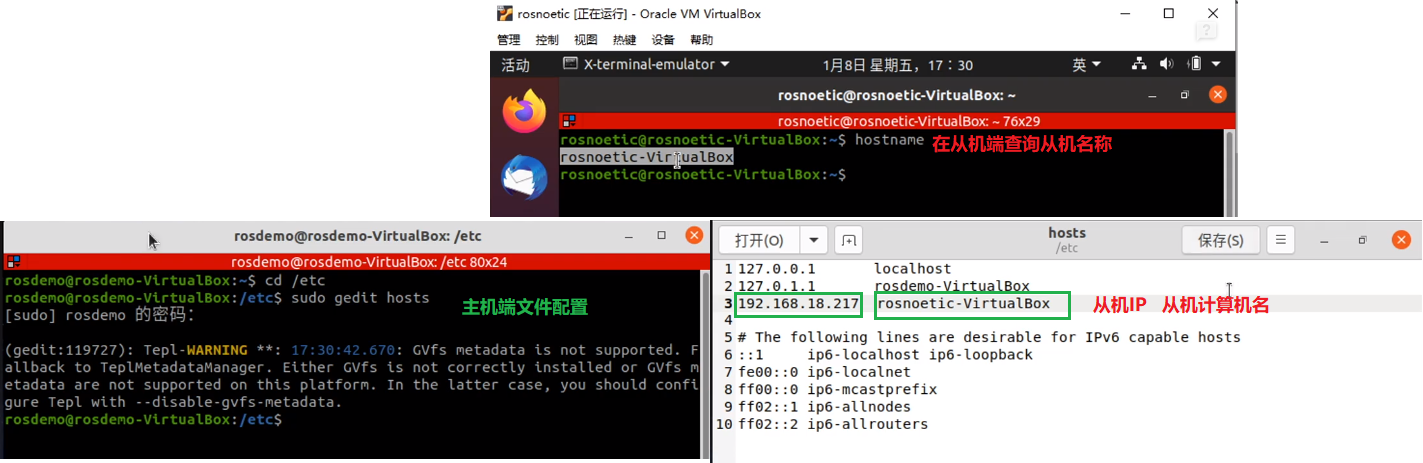
从机端:
主机的IP 主机计算机名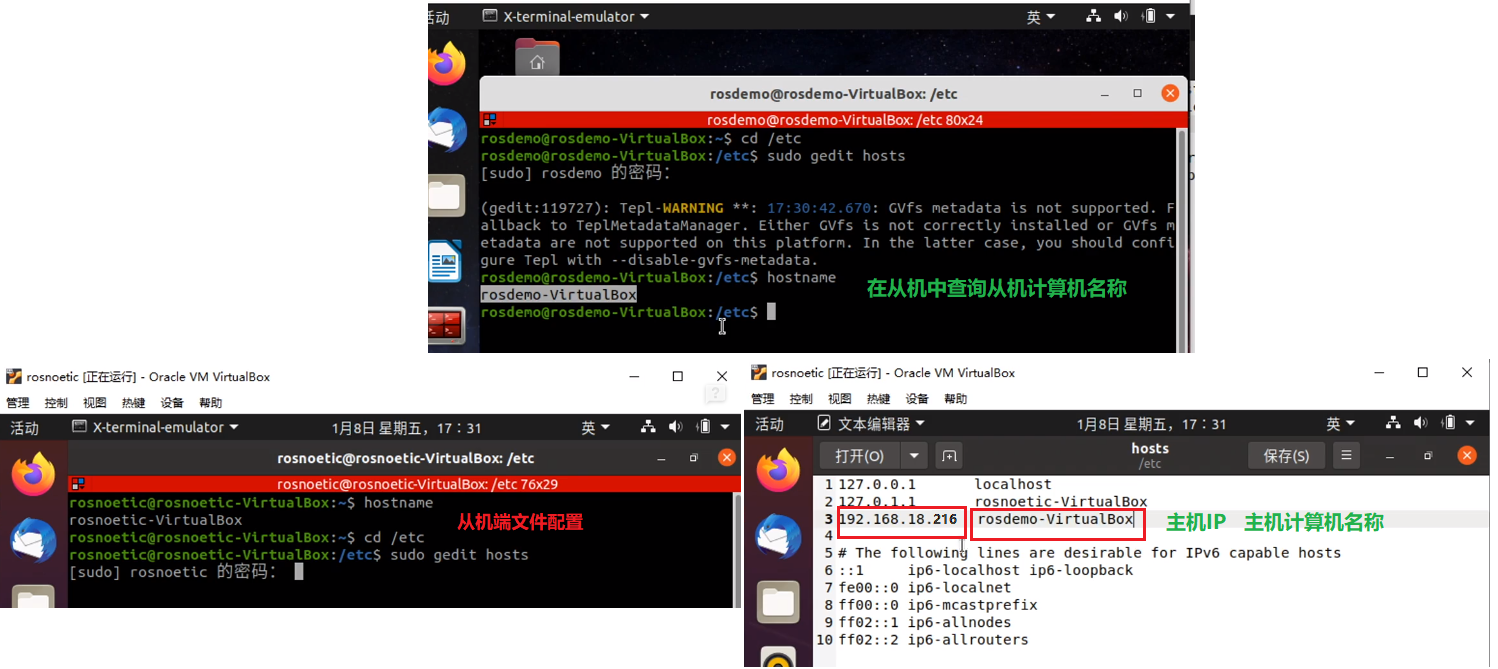
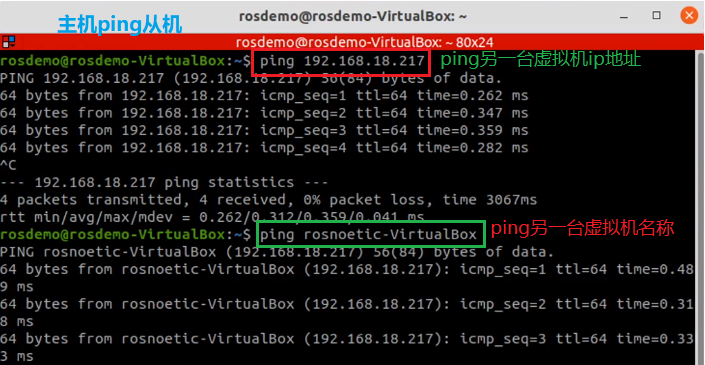
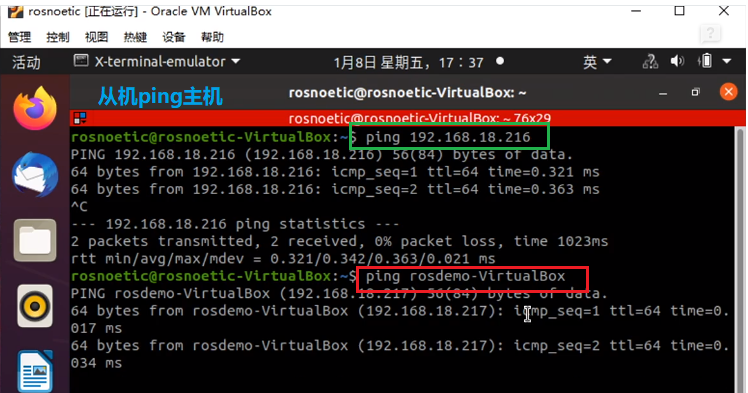
设置完毕重启两台计算机保证配置文件生效,可以通过 ping 命令测试网络通信是否正常。
IP地址查看名: ifconfig
计算机名称查看: hostname
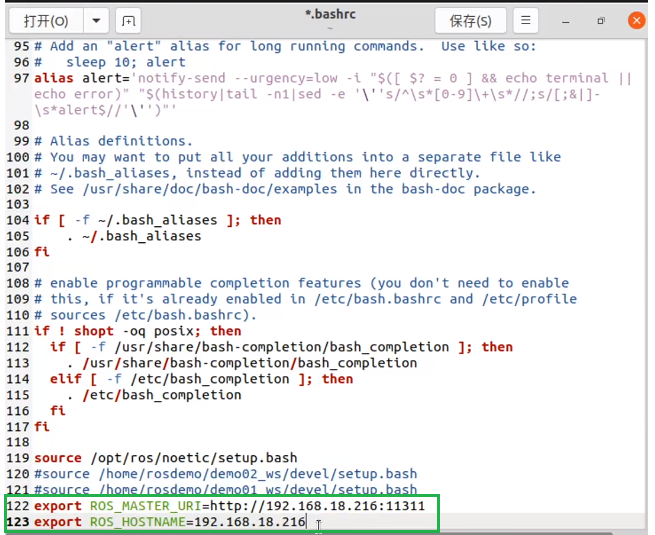
3.配置主机IP(启动Roscore代表主机)
配置主机的 IP 地址
~/.bashrc 追加
export ROS_MASTER_URI=http://主机IP:11311
export ROS_HOSTNAME=主机IP
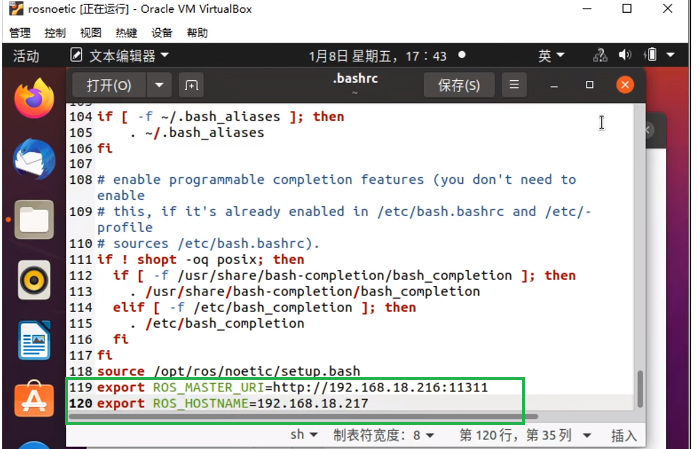
4.配置从机IP
配置从机的 IP 地址,从机可以有多台,每台都做如下设置:
~/.bashrc 追加
export ROS_MASTER_URI=http://主机IP:11311
export ROS_HOSTNAME=从机IP
测试
1.主机启动 roscore(必须)
2.主机启动订阅节点,从机启动发布节点,测试通信是否正常
3.反向测试,主机启动发布节点,从机启动订阅节点,测试通信是否正常

4.7 ROS分布式通信的更多相关文章
- ROS串口通信
身处机器人行业,不想一直只做低端的单片机控制,老是待在舒适区,所以一直都想学一下ROS系统,但看了几个月资料后,感觉还是云里雾里,似懂非懂,感念似乎都很清楚,但要实际去做,却又感觉无从下手. 于是想先 ...
- axis实现webservices分布式通信
分布式通信原理 watermark/2/text/aHR0cDovL2Jsb2cuY3Nkbi5uZXQvY2ZsMjAxMjEzMTQ=/font/5a6L5L2T/fontsize/400/fil ...
- 10.axis实现webservices分布式通信
转自:https://www.aliyun.com/jiaocheng/310112.html 分布式通信原理 基本原理:stub和skeleton作为客户端和服务端传输的中介,stub和skelet ...
- 分布式通信框架RMI
1.RPC概念: Remote procedure call protocal,远程过程调用协议,一般用来实现部署在不同机器上的系统之间的方法调用, 使得程序能够像访问本地系统资源一样,通过网络传输去 ...
- 分布式通信-tcp/ip socket
Socket通讯的过程 Server端Listen(监听)某个端口是否有连接请求,Client端向Server 端发出Connect(连接)请求,Server端向Client端发回Accept(接受) ...
- (八)分布式通信----主机Host
上节中有谈到的是通信主机(TransportHost),本节中主机(ServiceHost)负责管理服务的生命周期. 项目中将两个主机拆分开,实现不同的功能: 通信主机:用于启动通信监听端口: 生命周 ...
- (七)分布式通信----Netty实现NIO通信
目录 1. 消息监听器 2. 指令执行器 3. 消息发送器 4. 客户端工厂 5. 序列化工具 6. 通信主机 项目文件结构图 通信主机: 1. 消息监听器(黄色框) 这部分由 Netty 实现,Ne ...
- Ros的通信第一课
//////////////////////////Ros创建发布者talker//////////////////////////////////////////////////////////// ...
- 分布式通信-tcp/ip 广播
服务端 /** * 广播 */ public class MulticastServer { public static void main(String[] args) { try { //地址是2 ...
随机推荐
- 怎样快速对二进制和十进制进行互转化——IP地址规划与设计总结
转至:https://blog.csdn.net/erlian1992/article/details/47342189 最近一直在看全国计算机三级网络技术这本书,看到第二章的时候,不免会遇到计算机中 ...
- 详解pandas的read_csv方法
楔子 使用pandas做数据处理的第一步就是读取数据,数据源可以来自于各种地方,csv文件便是其中之一.而读取csv文件,pandas也提供了非常强力的支持,参数有四五十个.这些参数中,有的很容易被忽 ...
- iptables使用详解(centos7)
安装前 里面有iptables的命令 [root@mcw01 ~]$ rpm -qa|grep iptables iptables-1.4.21-18.0.1.el7.centos.x86_64 [r ...
- 微服务从代码到k8s部署应有尽有系列(十一、日志收集)
我们用一个系列来讲解从需求到上线.从代码到k8s部署.从日志到监控等各个方面的微服务完整实践. 整个项目使用了go-zero开发的微服务,基本包含了go-zero以及相关go-zero作者开发的一些中 ...
- JZ-021-栈的压入、弹出序列
栈的压入.弹出序列 题目描述 输入两个整数序列,第一个序列表示栈的压入顺序,请判断第二个序列是否可能为该栈的弹出顺序.假设压入栈的所有数字均不相等. 例如序列1,2,3,4,5是某栈的压入顺序,序列4 ...
- Spark中的Wordcount
目录 通过scala语言基于local编写spark的Wordcount 基于yarn去调度WordCount 通过scala语言基于local编写spark的Wordcount import org ...
- Linux命令大全(查看日志)
1.查看日志常用命令 tail: -n 是显示行号:相当于nl命令:例子如下: tail -100f test.log 实时监控100行日 ...
- LGP3702题解
很容易想到容斥,计算不包含质数的方案数和总方案数. 设 \(f[n][i]\) 表示长度为 \(n\) 的序列,每个元素的和对 \(p\) 取模的结果. 容易有 \(f[n][i]=\sum_{j=0 ...
- 2.2 C++STL string容器详解
文章目录 引言 2.2.1 string的特性 2.2.2 string用法理论 2.2.2.1 string构造函数 2.2.2.2 string赋值操作 2.2.2.3 string取值操作 2. ...
- OpenCv基础_一
图片的读取和展示 import cv2 img = cv2.imread('1.jpg') cv2.imshow('img',img) cv2.waitKey(0) cv2.destroyAllWin ...