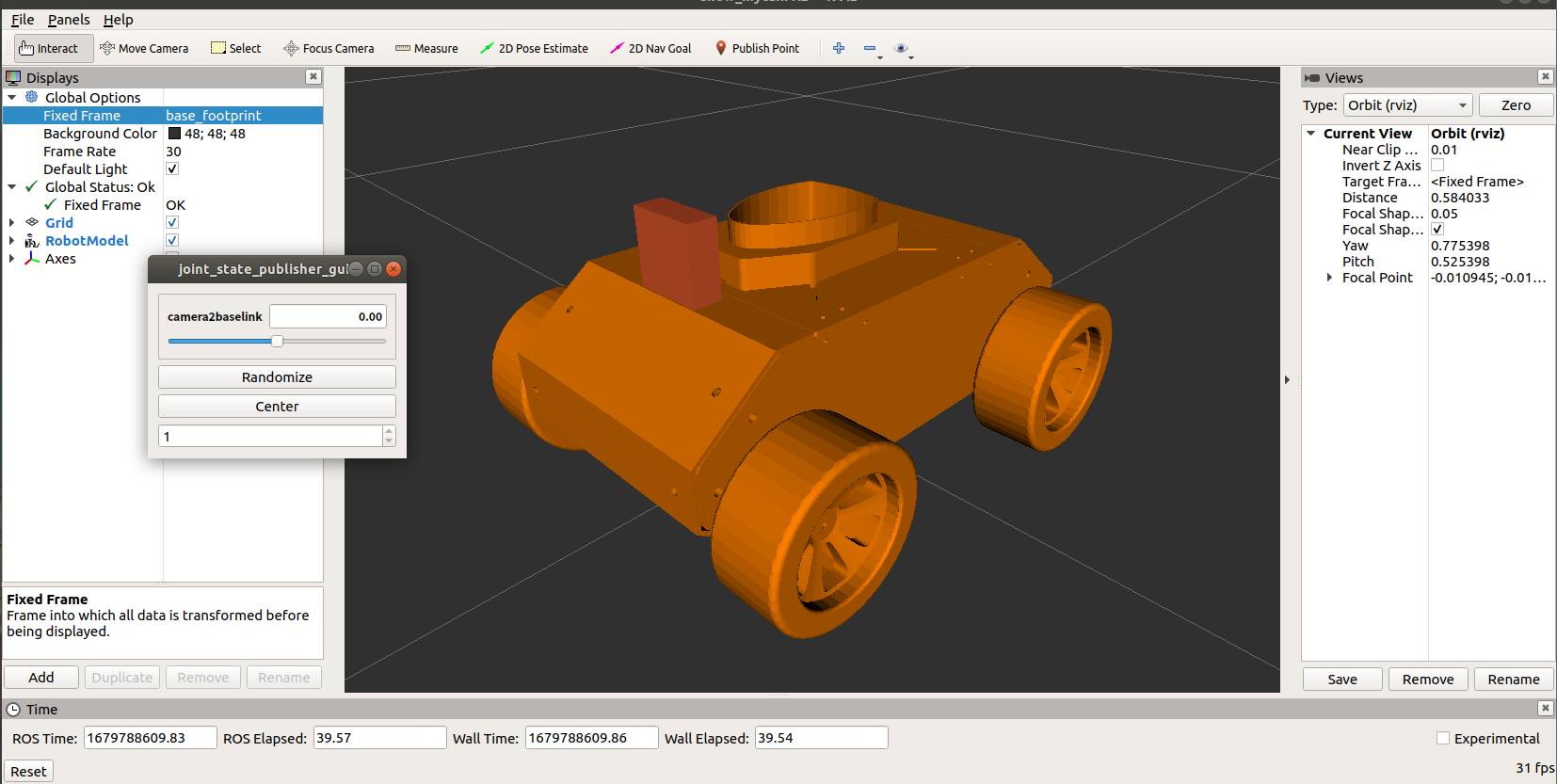
带有可旋转摄像头的移动小车(urdf+rviz)
成果图
step1:新建工作空间
mkdir -p catkin_ws/src
cd catkin_ws
catkin_make
step2:建立工作包
右键src,选择 Create Catkin Package

输入包名之后,点击回车
依次写入配置:urdf xacro
step3: 创建要用的文件夹
在urdf01_rviz文件夹下依次创建config、launch、meshes、urdf文件夹
在urdf文件夹下再创建一个urdf文件夹(保证结构的可读性)
step4:下载meshes文件夹下需要的文件
终端输入:
git clone https://github.com/zx595306686/sim_demo.git
得到以下文件
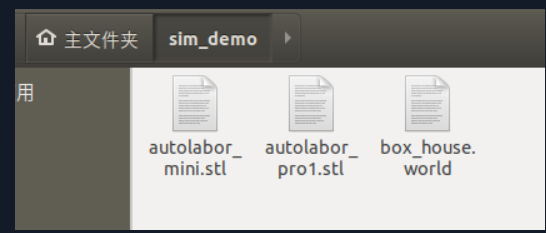
将前两个文件复制到创建的meshes文件夹下
step5:src/urdf01_rviz/urdf/urdf/camera_car_footprint.urdf
<robot name="mycar">
<link name="base_footprint">
<visual>
<geometry>
<box size="0.001 0.001 0.001" />
</geometry>
</visual>
</link>
<link name="base_link">
<visual>
<geometry>
<mesh filename="package://urdf01_rviz/meshes/autolabor_mini.stl"/>
</geometry>
<origin xyz="0 0 0" rpy="1.57 0 1.57" />
<material name="base_color">
<color rgba="1 0.5 0 1" />
</material>
</visual>
</link>
<link name="camera">
<visual>
<geometry>
<box size="0.02 0.05 0.05" />
</geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
<material name="camera_color">
<color rgba="1 0.4 0.2 1" />
</material>
</visual>
</link>
<joint name="base_link2base_footprint" type="fixed">
<parent link="base_footprint"/>
<child link="base_link" />
<origin xyz="0 0 0.05" rpy="0 0 0" />
</joint>
<joint name="camera2baselink" type="continuous">
<parent link="base_link"/>
<child link="camera" />
<origin xyz="0.11 0 0.115" rpy="0 0 0" />
<axis xyz="0 0 1" />
</joint>
</robot>
step6:src/urdf01_rviz/launch/camera_car_footprint.launch
<launch>
<!-- 在参数服务器载入 urdf 文件 -->
<!-- 设置参数 -->
<param name="robot_description" textfile="$(find urdf01_rviz)/urdf/urdf/camera_car_footprint.urdf" />
<!-- 启动 rviz -->
<node pkg="rviz" type="rviz" name="rviz" args="-d $(find urdf01_rviz)/config/show_mycar.rviz" />
<!-- 添加关节状态发布节点(出现转速过快现象进行注释) -->
<!-- <node pkg="joint_state_publisher" type="joint_state_publisher" name="joint_state_publisher" /> -->
<!-- 添加机器人状态发布节点 -->
<node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher" />
<!-- 可选:用于控制关节运动的节点 -->
<node pkg="joint_state_publisher_gui" type="joint_state_publisher_gui" name="joint_state_publisher_gui" />
</launch>
step7:在终端启动launch文件
cd catkin_ws
source ./devel/setup.bash
roslaunch urdf01_rviz camera_car_footprint.launch
rviz启动后,需要先add模型

设置joint参考的parent

step8:保存模型
保存模型至创建的config文件夹下
可取名为show_mycar.rviz

常见问题汇总
1、没有安装rviz
如果rviz没有安装,请调用如下命令自行安装:
sudo apt install ros-[ROS_DISTRO]-rviz
2、没有安装gazebo
1.添加源:
sudo sh -c 'echo "deb http://packages.osrfoundation.org/gazebo/ubuntu-stable `lsb_release -cs` main"
>
/etc/apt/sources.list.d/gazebo-stable.list'
wget http://packages.osrfoundation.org/gazebo.key -O - | sudo apt-key add -
2.安装:
sudo apt update
sudo apt install gazebo11
sudo apt install libgazebo11-dev
3、命令行输出UnicodeEncodeError错误提示
UnicodeEncodeError: 'ascii' codec can't encode characters in position 463-464: ordinal not in range(128)
[joint_state_publisher-3] process has died [pid 4443, exit code 1, cmd /opt/ros/melodic/lib/joint_state_publisher/joint_state_publisher __name:=joint_state_publisher __log:=/home/rosmelodic/.ros/log/b38967c0-0acb-11eb-aee3-0800278ee10c/joint_state_publisher-3.log].
log file: /home/rosmelodic/.ros/log/b38967c0-0acb-11eb-aee3-0800278ee10c/joint_state_publisher-3*.log
rviz中提示坐标变换异常,导致机器人部件显示结构异常
原因:编码问题导致的
解决:去除URDF中的中文注释
4、命令行输出joint_state_publisher_gui错误提示
[ERROR] [1584370263.037038]: Could not find the GUI, install the 'joint_state_publisher_gui' package
终端执行安装指令:
sudo apt install ros-noetic-joint-state-publisher-gui
5、无法安全地用该源进行更新,所以默认禁用该源 E: 无法定位软件包
我们安装软件的时候经常会出现无法安全地用该源进行更新,所以默认禁用该源 以及 E: 无法定位软件包
依次在终端执行以下指令:
sudo apt install ros-noetic-gmapping
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
sudo apt update
sudo apt-get install ros-melodic-joint-state-publisher-gui
带有可旋转摄像头的移动小车(urdf+rviz)的更多相关文章
- ROS学习笔记十一:创建URDF 文件并在RVIZ中查看模型
Unified Robot Description Format,简称为URDF(标准化机器人描述格式),是一种用于描述机器人及其部分结构.关节.自由度等的XML格式文件. 一.创建第一个URDF文件 ...
- ROS学习记录(二)————使用smartcar进行仿真(用.xacro文件来运行rviz)
我发现一个学习ROS系统的好网站: 创客智造http://www.ncnynl.com/ 这里面关于ROS的各个方面都有很详细的介绍. 这周,不,上周我对整个ROS是绝望的,我用一个一个下午的时间在敲 ...
- <ROS> 机器人描述--URDF和XACRO
文章转自 https://blog.csdn.net/sunbibei/article/details/52297524 特此鸣谢原创作者的辛勤付出 1 URDF 文件 1.1 link和joint ...
- ROS进阶学习手记 7.2 -- RViz仿真实例2:Create SmartCar
上一节玩了 exbot 在RViz里的仿真控制,这里我们用urdf文件写个自己的小车模型,ref: http://blog.csdn.net/hcx25909/article/details/8904 ...
- Solidworks 2016中导出URDF文件
安装SolidWorks to URDF exporter插件 下载SolidWorks to URDF Exporter插件后按照网站上的步骤进行安装(目前该插件已经在Win 7 64位系统+Sol ...
- ROS中URDF的学习以及与Xacro的比较
1.urdf与Xacro简单比较 "URDF" 是最初也是比较简单的机器人描述文件,它的结构简单明了,容易理解.但是这也导致当机器人模型变得复杂时,urdf的结构描述就变得冗长,无 ...
- USB摄像头驱动框架分析
usb摄像头驱动程序,里面涉及硬件的操作.比如说,想设置亮度的时候,需要把亮度的参数发给硬件.去得到真正视频数据的时候,需要访问硬件得到数据.usb摄像头驱动程序框架与虚拟摄像头驱动程序的框架是一样的 ...
- ROS-Gazebo-turtlebot3仿真
前言:Gazebo是一款强大的3D仿真器,支持机器人开发所需的机器人.传感器和环境模型,并且通过搭载的物理引擎可以得到逼真的仿真结果.即便Gazebo是一款开源仿真器,却具有高水准的仿真性能,因此在机 ...
- ROS-URDF仿真
前言:URDF (标准化机器人描述格式),是一种用于描述机器人及其部分结构.关节.自由度等的XML格式文件. 一.首先做一个带有四个轮子的机器人底座. 1.1 新建urdf文件 在chapter4_t ...
- 利用Kinect将投影变得可直接用手操控
Finally 总算是到了这一天了!假期里算法想不出来,或者被BUG折磨得死去活来的时候,总是YY着什么时候能心情愉快地坐在电脑前写一篇项目总结,今天总算是抽出时间来总结一下这神奇的几个月. 现在回过 ...
随机推荐
- Diffusion Model-Stable Diffusion(一)
Stable Diffusion 是一个基于扩散模型的图像生成模型,可以用于生成高质量图像.其传统实现主要基于 PyTorch,最常用的开源实现是 CompVis/stable-diffusion 和 ...
- IM开发干货分享:IM客户端不同版本兼容运行的技术思路和实践总结
本文由巩鹏军分享,原题"IM兼容性基建",本文有修订. 1.引言 一个成熟的IM成品,在运营过程中随着时间的推移,会发布不同的版本,但为了用户体验并不能强制要求用户必须升级到最新版 ...
- # 个人认为windows下最好用的一批软件 #
个人认为windows下最好用的一批软件 chrome 为什么是chrome而不是edge2? 这当然不是因为我是谷歌吹什么的.其实当得知edge2比chrome更省内存,运行更快,而且不跨越城墙就能 ...
- 前端vue获取excell中的数据
这个功能我觉得还是挺好的,比如要批量上传一些数据,然后不用一个一个填入直接写个excell表然后一起上传,然后我在这边记录一下 首先用到了xlsx这个插件 下载 npm i xlsx --save 使 ...
- Python 问题汇总
一. Python 环境问题 使用pytest 在terminal中执行脚本调用python3.9, 而使用pycharm 的virtualenv 执行脚本调用的是python3.10, 由于环境不一 ...
- 国家和地区代码列表,ISO 3166-1:2006
本文根据ISO 3166-1:2006(International Standard Norme Internationale) 英文版(含2007年补充说明)整理.与ISO 3166-1:1997相 ...
- 学Shiro完结版-4
第十四章 SSL--<跟我学Shiro> 对于SSL的支持,Shiro只是判断当前url是否需要SSL登录,如果需要自动重定向到https进行访问. 首先生成数字证书,生成证书到D:\lo ...
- C#遍历获取文件夹下所有文件
1 using System; 2 using System.Collections.Generic; 3 using System.IO; 4 using System.Linq; 5 using ...
- 京东h5st参数js逆向
扣代码的环节挺简单的就不讲了 直接到重点 发现许多包都会有一个h5st的加密参数 那么我们就要看这个参数是怎么生成的 我们可以根据请求堆栈 找到h5st的入口 当然还有一种更简单的方法 就是直接全局搜 ...
- 关于CSRF漏洞的一次有趣的交互
前言 在一次项目中,挖掘了一些CSRF漏洞,将细节提交给客户后,发生了一些有趣的交互,这里简单的先把他叫为薛定谔的CSRF,对其深入了解了一下,且听我细细道来. 薛定谔的CSRF 故事背景是对一个项目 ...