玩转X-CTR100 l STM32F4 l PS2无线手柄-4WD智能小车

我造轮子,你造车,创客一起造起来!更多塔克创新资讯【塔克社区 www.xtark.cn 】【塔克博客 www.cnblogs.com/xtark/ 】
前面已介绍X-CTR100控制器解码PS2无线手柄,本文继续前文,使用PS2无线手柄,实现4WD智能小车的控制,实现两种控制模式,方向模式和坦克模式。
例程-PS2无线手柄-4WD智能小车(方向模式)
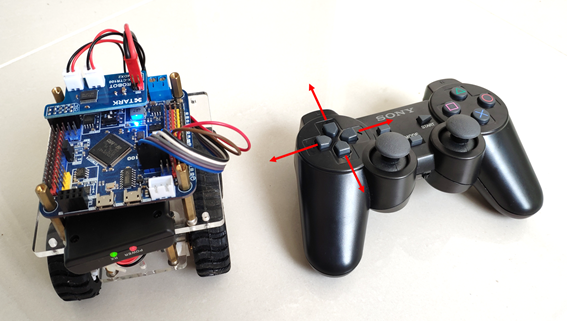
使用4个方向按键,实现智能小车前进、后退、原地左转、原地右转四个运动操作。
硬件说明
硬件资源:
- 串口UART1
- LC扩展接口(非串口,作为普通IO口使用)
- RO、RP接口,控制电机
- X-CTR100-MDX2电机驱动模块或自备其它直流电机驱动模块(自备)
- PS2无线手柄(需自备)
PS2手柄连接关系如下,
DATA——LC接口-D6
COMM——LC接口-D5
GND——LC接口-GND
VCC——LC接口-3.3V
ATT——LC接口-D7
CLOCK——LC接口-D4
ACK——LC接口-D3
特别说明,注意左右电机连接顺序和电机正反连接顺序,如果不能按照预期动作,请自行调整,或修改程序代码。
软件说明
主程序代码如下。
|
int main(void) { //X-CTR100初始化 AX_Init(115200); printf("***X-CTR100 PS2无线手柄例程***\r\n\r\n"); //功能配置 AX_MOTOR_TIM1_MNOP_Init(20); //初始化电机控制端口,PWM频率为20KHz AX_PS2_Init(); //PS2初始化 AX_Delayms(10);
while (1) { AX_PS2_ScanKey(&my_joystick);
//LR按键控制方式(塔克模式) if((my_joystick.btn1|0xEF) == 0xEF) //前 { AX_MOTOR_TIM1_O_SetSpeed(60); AX_MOTOR_TIM1_P_SetSpeed(60); } else if((my_joystick.btn1|0xBF) == 0xBF) //后 { AX_MOTOR_TIM1_O_SetSpeed(-60); AX_MOTOR_TIM1_P_SetSpeed(-60); } else if((my_joystick.btn1|0xDF) == 0xDF) //右 { AX_MOTOR_TIM1_O_SetSpeed(-60); AX_MOTOR_TIM1_P_SetSpeed(60); } else if((my_joystick.btn1|0x7F) == 0x7F) //左 { AX_MOTOR_TIM1_O_SetSpeed(60); AX_MOTOR_TIM1_P_SetSpeed(-60); } else //停止 { AX_MOTOR_TIM1_O_SetSpeed(0); AX_MOTOR_TIM1_P_SetSpeed(0); }
printf("MODE:%2x BTN1:%2x BTN2:%2x RJOY_LR:%2x RJOY_UD:%2x LJOY_LR:%2x LJOY_UD:%2x\r\n", my_joystick.mode, my_joystick.btn1, my_joystick.btn2, my_joystick.RJoy_LR, my_joystick.RJoy_UD, my_joystick.LJoy_LR, my_joystick.LJoy_UD);
AX_Delayms(30); } } |
转速可根据自己的4WD转速调试,支持-200~200转速,负为倒转,0为停止。
例程-PS2无线手柄-4WD智能小车(坦克模式)
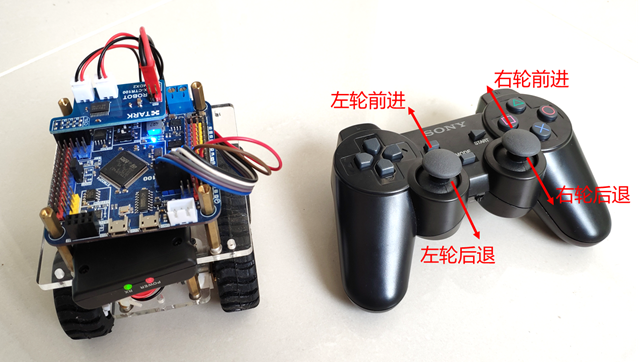
像坦克车一样使用左右摇杆控制小车,左摇杆控制左轮前进后退,可调速,右摇杆控制右轮。
硬件说明
硬件资源:
- 串口UART1
- LC扩展接口(非串口,作为普通IO口使用)
- RO、RP接口,控制电机
- X-CTR100-MDX2电机驱动模块或自备其它直流电机驱动模块(自备)
- PS2无线手柄(需自备)
PS2手柄连接关系如下,
DATA——LC接口-D6
COMM——LC接口-D5
GND——LC接口-GND
VCC——LC接口-3.3V
ATT——LC接口-D7
CLOCK——LC接口-D4
ACK——LC接口-D3
特别说明,注意左右电机连接顺序和电机正反连接顺序,如果不能按照预期动作,请自行调整,或修改程序代码。
软件说明
主程序代码如下。
|
int main(void) { //X-CTR100初始化 AX_Init(115200); printf("***X-CTR100 PS2无线手柄例程***\r\n\r\n"); //功能配置 AX_MOTOR_TIM1_MNOP_Init(20); //初始化电机控制端口,PWM频率为20KHz AX_PS2_Init(); //PS2初始化 AX_Delayms(1);
while (1) { AX_PS2_ScanKey(&my_joystick);
//双摇杆控制方式(塔克模式) //左摇杆控制左轮前进后退,右摇杆控制右轮 AX_MOTOR_TIM1_O_SetSpeed((0x7F-my_joystick.RJoy_UD)/2); AX_MOTOR_TIM1_P_SetSpeed((0x7F-my_joystick.LJoy_UD)/2);
//打印手柄键值 printf("MODE:%2x BTN1:%2x BTN2:%2x RJOY_LR:%2x RJOY_UD:%2x LJOY_LR:%2x LJOY_UD:%2x\r\n", my_joystick.mode, my_joystick.btn1, my_joystick.btn2, my_joystick.RJoy_LR, my_joystick.RJoy_UD, my_joystick.LJoy_LR, my_joystick.LJoy_UD);
AX_Delayms(30); } } |
玩转X-CTR100 l STM32F4 l PS2无线手柄-4WD智能小车的更多相关文章
- 玩转X-CTR100 l STM32F4 l PS2无线手柄
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] SONY的PS2无线手柄是索尼游戏机的遥控手柄,控制 ...
- 玩转X-CTR100 l 平台-4WD智能小车
我造轮子,你造车,创客一起造起来!更多塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍使用X-CTR100控制器搭建4WD智能 ...
- 玩转X-CTR100 l STM32F4 l ADC 模拟数字转换
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器 AD转换接 ...
- 玩转X-CTR100 l STM32F4 l MPU6050加速度陀螺仪传感器
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器 板载加速度 ...
- 玩转X-CTR100 l STM32F4 l X-CTR100与树莓派搭建机器人平台
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器与树莓派Linux系统 ...
- 玩转X-CTR100 l STM32F4 l 舵机控制
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器的舵机控制,X-CTR ...
- 玩转X-CTR100 l STM32F4 l DRV8825 A4988 步进电机控制
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器控制步进电机 ...
- 玩转X-CTR100 l STM32F4 l 基础例程printf、LED、蜂鸣器、拨码开关、位带操作
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器基础板载资源 ...
- 玩转X-CTR100 l STM32F4 l DSP指令集性能测试
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器 DSP库的 ...
随机推荐
- 自定义redis序列化工具
redis一个优点就是可以将数据写入到磁盘中. 我们知道写入磁盘的数据实际上都是以字节(0101这样的二进制数据)的形式写入的. 这意味着如果我们要将一个对象写入磁盘,就必须将这个对象序列化. jav ...
- linux中C语言发送广播报文
2. 指令的解决方法: oute add -net 255.255.255.255 netmask 255.255.255.255 dev eth0 metric 1 或者 route add -ho ...
- 【BZOJ】 3238: [Ahoi2013]差异
题目链接:http://www.lydsy.com/JudgeOnline/problem.php?id=3238 求:$${\sum _{i=1}^{n-1}\sum _{j=i+1}^{n}len ...
- 获取本机ip的shell脚本
ifconfig br0 | grep 'inet addr' | sed 's/^.*addr://g' |sed 's/ Bcast:.*$//g' 注意:br0为网卡名称,需要改成你使用的网卡名 ...
- shell模拟ctrl c停止
kill命令可以带信号号码选项,也可以不带. 如果没有信号号码,kill命令就会发出终止信号(15),这个信号可以被进程捕获,使得进程在退出之前可以清理并释放资源. 也可以用kill向进程发送特定的信 ...
- hdu 5724-Chess(状态压缩+sg函数)
hdu 5724-Chess 代码: #include<bits/stdc++.h> using namespace std; ; <<N]; bool S[N]; void ...
- 第一次学习 CG( c for graphic) 遇到的一大推坑
1.CG开发环境的配置: 具体的工具包下载及整体的配置过程可以参考:https://blog.csdn.net/seamanj/article/details/8300936. 上面网址的内容是对VS ...
- Lightoj Halloween Costumes
题意:给出要n个时间穿的服装.服装脱下就不能再穿.问最少要准备多少? dp[i][j]表示i到j之间最少花费.如果n=1(n指长度),肯定结果为1,n=2时,也很好算.然后n=3的时候dp[i][j] ...
- [NOI2018]你的名字(68pts)
SAM真让人头秃. 题面 https://www.luogu.org/problemnew/show/P4770 首先考虑 l=1,r=∣S∣的做法 如果对于ION2018的子串不用判重的话,对ION ...
- Codeforces Round #364 (Div. 1) (差一个后缀自动机)
B. Connecting Universities 大意: 给定树, 给定2*k个点, 求将2*k个点两两匹配, 每个匹配的贡献为两点的距离, 求贡献最大值 单独考虑每条边$(u,v)$的贡献即可, ...