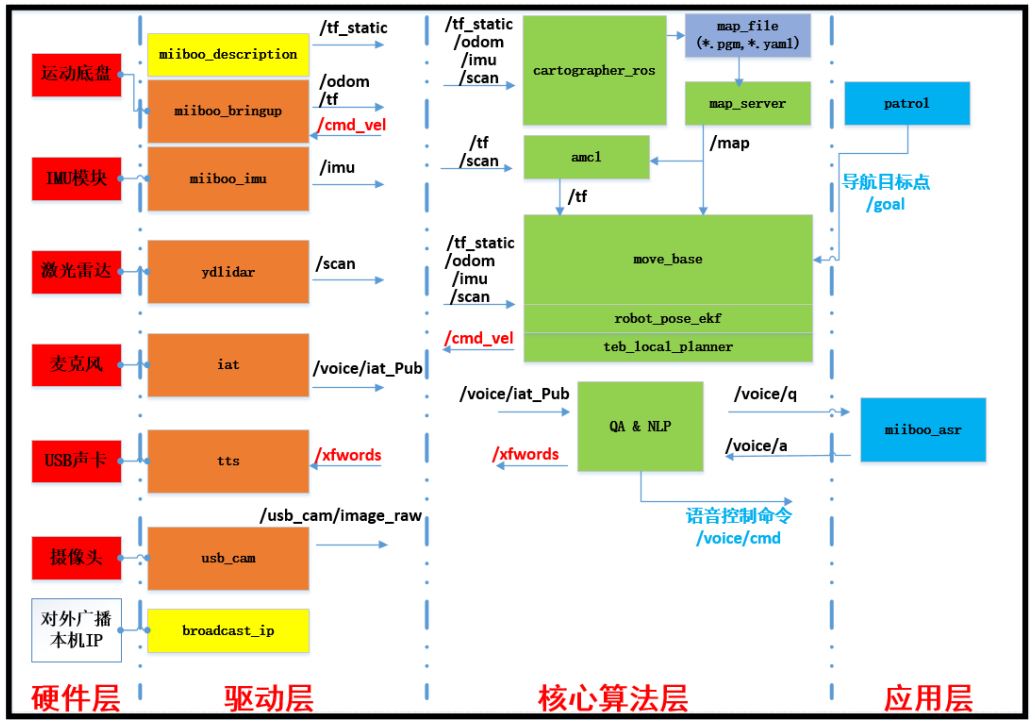
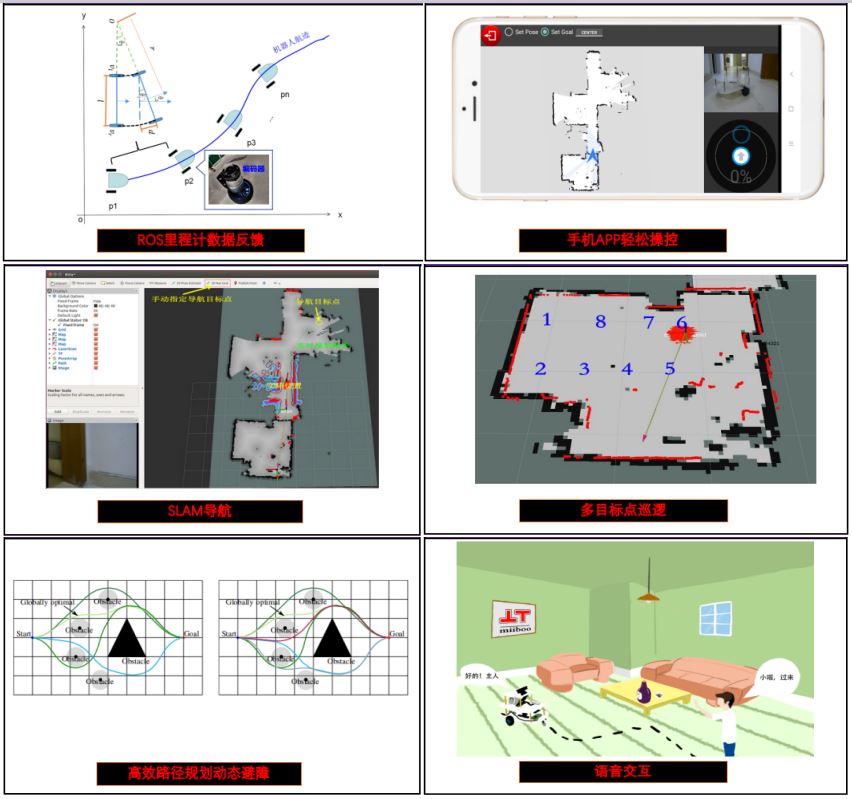
SLAM+语音机器人DIY系列:前言
------SLAM+语音机器人DIY系列【目录】快速导览------
第1章:Linux基础
第2章:ROS入门
第3章:感知与大脑
第4章:差分底盘设计
第5章:树莓派3开发环境搭建
第6章:SLAM建图与自主避障导航
2.google-cartographer机器人SLAM建图
第7章:语音交互与自然语言处理
第8章:高阶拓展
2.centos7下部署Django(nginx+uwsgi+django+python3)
----------------文章将持续更新,敬请关注-----------------
如果大家对博文的相关类容感兴趣,或有什么技术疑问,欢迎加入下面的《SLAM+语音机器人DIY》QQ技术交流群,一起讨论学习^_^

----------------【了解miiboo机器人,发现更多精彩】----------------


----------------【miiboo机器人,视频教程,精彩不止于此】----------------



SLAM+语音机器人DIY系列:前言的更多相关文章
- SLAM+语音机器人DIY系列:(六)SLAM建图与自主避障导航——2.google-cartographer机器人SLAM建图
摘要 通过前面的基础学习,本章进入最为激动的机器人自主导航的学习.在前面的学习铺垫后,终于迎来了最大乐趣的时刻,就是赋予我们的miiboo机器人能自由行走的生命.本章将围绕机器人SLAM建图.导航避障 ...
- SLAM+语音机器人DIY系列:(五)树莓派3开发环境搭建——1.安装系统ubuntu_mate_16.04
摘要 通过前面一系列的铺垫,相信大家对整个miiboo机器人的DIY有了一个清晰整体的认识.接下来就正式进入机器人大脑(嵌入式主板:树莓派3)的开发.本章将从树莓派3的开发环境搭建入手,为后续ros开 ...
- SLAM+语音机器人DIY系列:(一)Linux基础——1.Linux简介
摘要 由于机器人SLAM.自动导航.语音交互这一系列算法都在机器人操作系统ROS中有很好的支持,所以后续的章节中都会使用ROS来组织构建代码:而ROS又是安装在Linux发行版ubuntu系统之上的, ...
- SLAM+语音机器人DIY系列:(一)Linux基础——2.安装Linux发行版ubuntu系统
摘要 由于机器人SLAM.自动导航.语音交互这一系列算法都在机器人操作系统ROS中有很好的支持,所以后续的章节中都会使用ROS来组织构建代码:而ROS又是安装在Linux发行版ubuntu系统之上的, ...
- SLAM+语音机器人DIY系列:(一)Linux基础——3.Linux命令行基础操作
摘要 由于机器人SLAM.自动导航.语音交互这一系列算法都在机器人操作系统ROS中有很好的支持,所以后续的章节中都会使用ROS来组织构建代码:而ROS又是安装在Linux发行版ubuntu系统之上的, ...
- SLAM+语音机器人DIY系列:(二)ROS入门——1.ROS是什么
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- SLAM+语音机器人DIY系列:(二)ROS入门——2.ROS系统整体架构
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- SLAM+语音机器人DIY系列:(二)ROS入门——3.在ubuntu16.04中安装ROS kinetic
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- SLAM+语音机器人DIY系列:(二)ROS入门——4.如何编写ROS的第一个程序hello_world
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
随机推荐
- MariaDB(MySql)使用储存过程和随机函数插入10万条数据
))default charset =utf8; #定义一个随机切割字符串的函数 delimiter // create function randStr() ) begin ) default 'A ...
- php类知识---try catch
<?php try { echo "比赛开始"."\n"; ); } catch (Exception $e ) { echo "获取错误信息: ...
- django查询优化及ajax编码格式下发送数据 总结
orm查询优化 1)only与refer only方法返回的是一个queryset对象,本质就是列表套数据对象 该对象内只含有only括号所指定的属性(其他属性也可以获取,但是需要重新走数据库 ...
- HDU 6043 - KazaQ's Socks | 2017 Multi-University Training Contest 1
/* HDU 6043 - KazaQ's Socks [ 找规律 ] | 2017 Multi-University Training Contest 1 题意: 一共 n 双袜子编号 1~n,每天 ...
- convert:图片转pdf失败
造冰箱的大熊猫@cnblogs 2019/1/21 1.环境 操作系统/Ubuntu 16.04.5 LTS,内核/4.15.0-43-generic,convert/ImageMagick 6.8 ...
- Fantasy of a Summation (LightOJ - 1213)(快速幂+简单思维)
题解:根据题目给的程序,就是计算给的这个序列,进行k次到n的循环,每个数需要加的次数是k*n^(k-1),所以快速幂取模,算计一下就可以了. #include <bits/stdc++.h> ...
- JavaWeb_(Hibernate框架)使用Hibernate开发用户注册功能
使用Hibernate开发用户注册功能: 用户在register.jsp表单成功后,页面跳转到login.html,数据库中会存放用户注册的信息 <%@ page language=" ...
- [CSP-S模拟测试]:答题(meet in the middle)
题目传送门(内部题142) 输入格式 输入文件的第一行为两个数$n,P$. 接下来一行$n$为个正整数,表示每道题的分数. 输出格式 输出一行一个正整数,为至少需要获得的分数. 样例 样例输入: 2 ...
- LeetCode 130. 被围绕的区域(Surrounded Regions)
题目描述 给定一个二维的矩阵,包含 'X' 和 'O'(字母 O). 找到所有被 'X' 围绕的区域,并将这些区域里所有的 'O' 用 'X' 填充. 示例: X X X X X O O X X X ...
- android data binding jetpack I 环境配置 model-view 简单绑定
android data binding jetpack VIII BindingConversion android data binding jetpack VII @BindingAdapter ...