SLAM学习笔记
ORB_SLAM2源码:
获得旋转矩阵,来自这里:http://www.cnblogs.com/shang-slam/p/6406584.html
关于Covisibility图来自:http://blog.csdn.net/zhaojun1204/article/details/53002752
1、Covisibility Graph是一个无向有权图(graph),这个概念最早来自2010的文章[Closing Loops Without Places]。简单来说,每个node就是关键帧,edge的权重就是两个关键帧找到足够多的相同的 3d 点的数目。
2、为了在优化阶段减小计算量,作者提出了Essential Graph的概念,这个能够连接所有的node,但是edge会减少很多。可以认为是Covisibity Graph的最小生成树(MST)。
另有:http://blog.csdn.net/u014488388/article/details/65446731
直接法和特征点法,来自知乎:

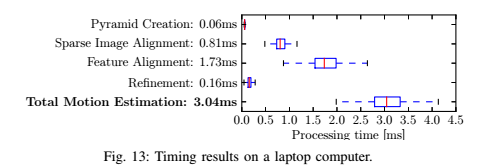
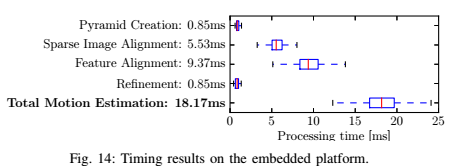
SVO论文中嵌入式平台和PC运行时间的比较,嵌入式平台ARM A9,4核1.6G;PC平台酷睿i7,8核1.6G,但作者指出这俩都只用两个CPU:
作者指出,作图线程的运行时间取决于深度滤波器的个数,有新关键帧插入时,滤波器个数很多,但随着滤波器的converge会显著下降。总的来说,作图线程比位姿估计线程耗时短得多,因此不重要。
高翔直接法笔记:
视频:http://www.bilibili.com/video/av6299156/
课件:http://www.rosclub.cn/post-231.html
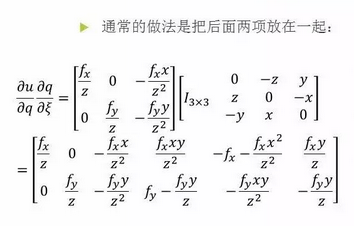
这个雅克比矩阵表示一个像素对李代数的变化量,刻画对相机做一个微小的扰动,p在相机第二个图里的的投影点是如何变化的。
SLAM常用依赖库:http://weixin.niurenqushi.com/article/2017-02-23/4776497.html
Eigen3、Sophus、OpenCV。
SuiteSparse库是稀疏矩阵运算库。Boost库是为C++语言标准库提供扩展的一些C++程序库的总称。Boost库很庞大,DSO其实只用了它的多线程功能。
Ziplib库是zip文件相关的库。这个库是可选的,DSO作者并没有强烈推荐大家安装。如果不安装的话,在运行TUM数据集的时候,需要把图像集的zip文件手动解压缩。
SLAM学习笔记的更多相关文章
- ROS_RGB-D SLAM学习笔记--室内环境测试
ROS_RGB-D SLAM学习笔记 RTAB-Map's ros-pkg. RTAB-Map is a RGB-D SLAM approach with real-time constraints. ...
- SLAM学习笔记(2)SLAM算法
SLAM算法分为三类:Kalman滤波.概率滤波.图优化 Kalman滤波方法包括EKF.EIF:概率滤波包括RBPF,FastSLAM是RBPF滤波器最为成功的实例, 也是应用最为广泛的SLAM方法 ...
- SLAM学习笔记(1)基本概念
SLAM (simultaneous localization and mapping),也称为CML (Concurrent Mapping and Localization), 即时定位与地图构建 ...
- SLAM学习笔记 - 视觉SLAM方法资源汇总
工具类: ros框架 linux系列教程 vim Eigen Eigen快速入门 Pangolin Pangolin安装与使用 数据集: TUM 数据格式 提供pyt ...
- SLAM学习笔记 - ORB_SLAM2源码运行及分析
参考资料: DBow2的理解 单目跑TUM数据集的运行和函数调用过程 跑数据集不需要ros和相机标定,进入ORB_SLAM目录,执行以下命令: ./Examples/Monocluar/mono_tu ...
- SLAM学习笔记(3)相关概念
SIFT,即尺度不变特征变换(Scale-invariant feature transform,SIFT),是用于图像处理领域的一种描述子.这种描述具有尺度不变性,可在图像中检测出关键点,是一种局部 ...
- SLAM学习笔记 - 世界坐标系到相机坐标系的变换
参考自: http://blog.csdn.net/yangdashi888/article/details/51356385 http://blog.csdn.net/li_007/article/ ...
- ROS学习笔记八:基于Qt搭建ROS开发环境
1 前言 本文介绍一种Qt下进行ROS开发的完美方案,使用的是ros-industrial的Levi-Armstrong在2015年12月开发的一个Qt插件ros_qtc_plugin,这个插件使得Q ...
- Learning ROS for Robotics Programming Second Edition学习笔记(十) indigo Gazebo rviz slam navigation
中文译著已经出版,详情请参考:http://blog.csdn.net/ZhangRelay/article/category/6506865 moveit是书的最后一章,由于对机械臂完全不知,看不懂 ...
随机推荐
- 牛客Wannafly9E 组一组 差分约束
正解:差分约束 解题报告: 传送门! 首先肯定要想到把他们分开来考虑,就是说,把数二进制拆分掉,这样就可以分开考虑了嘛 然后考虑设f[i]:前i个数中的1的个数 然后就可以得到一堆差分约束的式子 然后 ...
- SpringBoot 使用RedisTemplate操作Redis
新版: import java.util.List; import java.util.Map; import java.util.Set; import java.util.concurrent.T ...
- 陌生的 metaclass(转)
add by zhj:这是我见过的对metaclass解释最清楚的文章了,例子很好,真是一例胜千言 原文:http://wiki.jikexueyuan.com/project/explore-pyt ...
- 浏览器的cookie的值改成字典格式
首先我们把复制的cookie的值赋给b >>> cookies = 'bid=Qzw9cKnyESM; ll="108288"; __yadk_uid=4YChv ...
- 前端 HTML form表单标签 input标签 type属性 file 上传文件
加上上传文件功能 input type='file' - 依赖form表单里一个属性 enctype="multipart/form-data" 加上这个属性表示把你上次文件一点 ...
- Python3学习之路~3.3 内置函数
Python内置函数表: 内置参数详解:https://docs.python.org/3/library/functions.html?highlight=built#ascii 用法: #Auth ...
- 初学git
初学git,总结了一点东西,可能有理解和操作的不到位的地方,还有就是这个是我之前写在word上的,因为CSDN上不能直接上传,所以拷贝的过程中也可能有其他问题.发的的朋友还望指正... 1.找到“参与 ...
- HTML5(Canvas Vedio Audio 拖动)
1.Canvas (在画布上(Canvas)画一个红色矩形,渐变矩形,彩色矩形,和一些彩色的文字) HTML5 元素用于图形的绘制,通过脚本 (通常是JavaScript)来完成. 标签只是图形 ...
- Learn nodejs: Tutorials for Programmers of All Levels, 程序员每个阶段的示例
https://stackify.com/learn-nodejs-tutorials/ What is Node.js? Node.js can be defined as a dynamic, c ...
- spring——事务管理
1.spring支持编程式事务管理和声明式事务管理. 编程式事务管理:编程式事务管理使用TransactionTemplate或者直接使用最底层的PlatformTransactionManager. ...