yolo进化史之yolov3
yolov3的论文写的比较简略,不看yolov1,yolov2很难直接看懂. 建议先看v1,v2论文.
yolov3主要做了几点改进
- 改进了特征提取部分的网络结构
- 多尺度预测
- 分类由softmax改为logistic
前面2个改进使得yolo对小目标的检测效果更好.
特征提取网络
由darknet19变为darknet53.
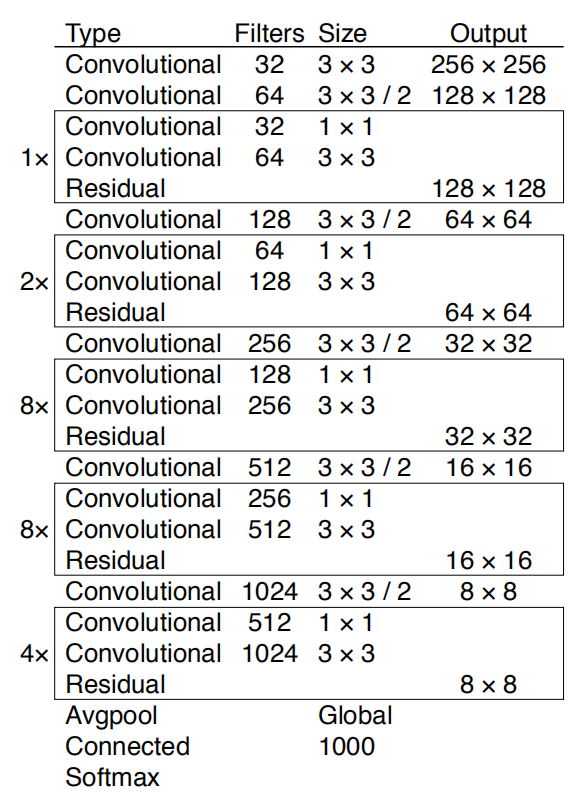
借鉴了resnet.
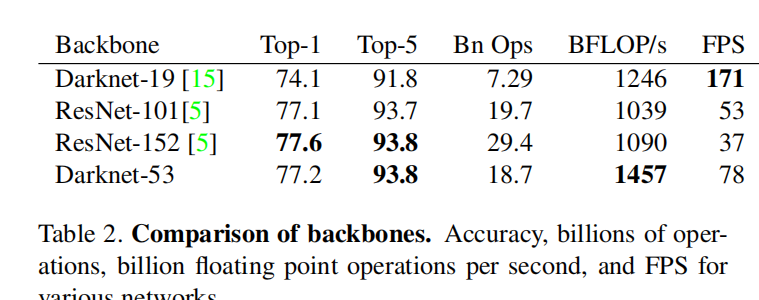
这个特征网络结构的变更是yolov3检测效果更好的一个重要原因.
多尺度预测
其实yolov2中就有了类似的想法,把不同layer的feature map连接起来成为新的feature map.也就是所谓的passthrough.但是yolov2中的这种做法得到的还是一个feature map.
yolov3中引入了多尺度的概念,生成好几种不同尺度的feature map.不同的feature map负责预测不同大小的目标.
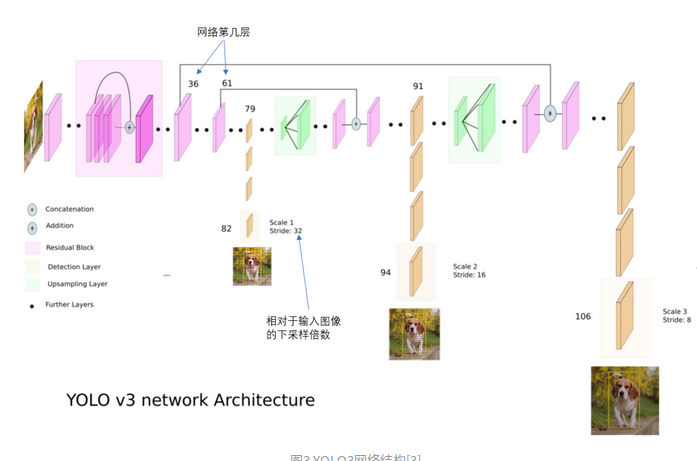
coco数据集聚类出来9个先验框:(10×13),(16×30),(33×23),(30×61),(62×45),(59×119),(116 × 90),(156 × 198),(373 × 326).
以416 x 416为例,yolov3最终生成13 x 13,26 x 26,52 x 52三种feature map.分别负责不同大小的目标预测. 越小分辨率的feature map负责越大的目标.

多尺度的引入使得能够预测的box多了很多.
分类由softmax改为logistic
解决了一个目标属于多个类别的问题.将softmax改为多个独立的logistic分类器,这样就可以预测出多个label.
instead we simply use independent logistic classifiers. During training we use binary cross-entropy loss for the class
predictions.
参考:https://pjreddie.com/media/files/papers/YOLOv3.pdf , https://www.jianshu.com/p/d13ae1055302
yolo进化史之yolov3的更多相关文章
- 目标检测YOLO进化史之yolov1
yolov3在目标检测领域可以算得上是state-of-art级别的了,在实时性和准确性上都有很好的保证.yolo也不是一开始就达到了这么好的效果,本身也是经历了不断地演进的. yolov1 测试图片 ...
- yolo进化史之yolov2
yolov1和当时最好的目标检测系统相比,有很多缺点.比如和Fast R-CNN相比,定位错误更多.和基于区域选择的目标检测方法相比,recall也比较低.yolov2的目标即在保证分类准确度的情况下 ...
- AI佳作解读系列(二)——目标检测AI算法集杂谈:R-CNN,faster R-CNN,yolo,SSD,yoloV2,yoloV3
1 引言 深度学习目前已经应用到了各个领域,应用场景大体分为三类:物体识别,目标检测,自然语言处理.本文着重与分析目标检测领域的深度学习方法,对其中的经典模型框架进行深入分析. 目标检测可以理解为是物 ...
- 检测算法简介及其原理——fast R-CNN,faster R-CNN,YOLO,SSD,YOLOv2,YOLOv3
1 引言 深度学习目前已经应用到了各个领域,应用场景大体分为三类:物体识别,目标检测,自然语言处理.本文着重与分析目标检测领域的深度学习方法,对其中的经典模型框架进行深入分析. 目标检测可以理解为是物 ...
- 小白也能弄懂的目标检测之YOLO系列 - 第一期
大家好,上期分享了电脑端几个免费无广告且实用的录屏软件,这期想给大家来讲解YOLO这个算法,从零基础学起,并最终学会YOLOV3的Pytorch实现,并学会自己制作数据集进行模型训练,然后用自己训练好 ...
- 目标检测网络之 YOLOv3
本文逐步介绍YOLO v1~v3的设计历程. YOLOv1基本思想 YOLO将输入图像分成SxS个格子,若某个物体 Ground truth 的中心位置的坐标落入到某个格子,那么这个格子就负责检测出这 ...
- 一文带你学会使用YOLO及Opencv完成图像及视频流目标检测(上)|附源码
计算机视觉领域中,目标检测一直是工业应用上比较热门且成熟的应用领域,比如人脸识别.行人检测等,国内的旷视科技.商汤科技等公司在该领域占据行业领先地位.相对于图像分类任务而言,目标检测会更加复杂一些,不 ...
- 【转】目标检测之YOLO系列详解
本文逐步介绍YOLO v1~v3的设计历程. YOLOv1基本思想 YOLO将输入图像分成SxS个格子,若某个物体 Ground truth 的中心位置的坐标落入到某个格子,那么这个格子就负责检测出这 ...
- YOLOv3和YOLOv4长篇核心综述(上)
YOLOv3和YOLOv4长篇核心综述(上) 对目标检测算法会经常使用和关注,比如Yolov3.Yolov4算法. 实际项目进行目标检测任务,比如人脸识别.多目标追踪.REID.客流统计等项目.因此目 ...
随机推荐
- Sqlmap过waf命令tamper各脚本的适用环境
0x00 相信很多小伙伴和我一样感同身受,站上明明有注入可是被万恶的WAF拦截了或者过滤了,这时候就需要用到SQLMAP强大的tamper了. 0x01 使用方法--tamper xxx.py apo ...
- 章节十六、1-TestNG简介
一.TestNG 介绍 1.TestNG 是一个来自 JUnit 和 NUnit 的测试框架,它具拥有更多的功能,提高了 执行的效率. 2.TestNG 是一个开源的自动化测试框架 去除了老框架的大部 ...
- 源码编译OpenJdk 8,Netbeans调试Java原子类在JVM中的实现(Ubuntu 16.04)
一.前言 前一阵子比较好奇,想看到底层(虚拟机.汇编)怎么实现的java 并发那块. volatile是在汇编里加了lock前缀,因为volatile可以通过查看JIT编译器的汇编代码来看. 但是原子 ...
- 基于ZooKeeper的三种分布式锁实现
[欢迎关注公众号:程序猿讲故事 (codestory),及时接收最新文章] 今天介绍基于ZooKeeper的分布式锁的简单实现,包括阻塞锁和非阻塞锁.同时增加了网上很少介绍的基于节点的非阻塞锁实现,主 ...
- StudyAndroid.2 Activity生命周期
onCreate(): 当我们点击activity的时候,系统会调用activity的oncreate()方法,在这个方法中我们会初始化当前布局setContentLayout()方法. onStar ...
- Oracle cursor学习笔记
目录 一.oracle库缓存 1.1.库缓存简介 1.2.相关概念 1.3.库缓存结构 1.4.sql执行过程简介 二.oracle cursor 2.1.cursor分类 2.2.shared cu ...
- SpingBoot:整合Elasticsearch7.2.0
Spring boot 2.1.X整合Elasticsearch最新版的一处问题 新版本的Spring boot 2的spring-boot-starter-data-elasticsearch中支持 ...
- REST 在 Java 中的使用
REST是一种混合的架构风格,它的由来以及它的架构元素在笔者的前一篇文章<REST 架构风格的由来 & 元素>中已经描述了.本篇主要描述一下J2EE对REST的支持. Java是在 ...
- NLP(二十) 利用词向量实现高维词在二维空间的可视化
准备 Alice in Wonderland数据集可用于单词抽取,结合稠密网络可实现其单词的可视化,这与编码器-解码器架构类似. 代码 from __future__ import print_fun ...
- [Revit]开始:编写一个简单外部命令
1 创建项目 以Visual Stidio作为开发工具,测试平台为Revit 2017 打开VS,创建一个C# .NET Framwork类库项目,选择..net框架版本为.NET Framwork ...