目标检测复习之Loss Functions 总结
Loss Functions 总结
损失函数分类: 回归损失函数(Regression loss), 分类损失函数(Classification loss)
Regression loss functions 通常用于模型预测一个连续的值,例如一个人的年龄
Classification loss functions 通常用于模型预测一个离散的值,例如猫狗分类问题
1. L1 loss
Mean Absolute Error(MAE), 也称作L1 loss computes the average of the sum of absolute differences between actual values and predicted values.
表达公式:

应用场合: 回归问题,尤其是当目标变量的分布存在异常值时,例如与ping均值相差很大的小值或大值。 它被认为对异常值更稳健。
Example:
import torch
import torch.nn as nn
input = torch.tensor(
[[-0.5, -1.5],
[0.3, -1.3]], requires_grad=True
)
target = torch.tensor(
[[1.1, 0.5],
[0.5, -1.5]]
)
mae_loss = nn.L1Loss()
output = mae_loss(input, target)
output.backward()
print('input: ', input)
print('target: ', target)
print('output: ', output)
print('input.grad', input.grad)
- OUTPUT
input: tensor([[-0.5000, -1.5000],
[ 0.3000, -1.3000]], requires_grad=True)
target: tensor([[ 1.1000, 0.5000],
[ 0.5000, -1.5000]])
output: tensor(1., grad_fn=<L1LossBackward>) # (按照公式计算)/4
input.grad tensor([[-0.2500, -0.2500], # (每个值求梯度[符号和target一样])/4
[-0.2500, 0.2500]])
L2 loss
Mean Squared Error(MSE) 也称作L2 loss computes the average of the squared differences between actual values and predicted values
表达公式
应用场合: ping方意味着当预测值离目标更远时在ping方后具有更大的惩罚,预测值离目标更近时在ping方后惩罚更小。 如果分类器错误是 100,则ping方后错误为 10,000。 如果错误是 0.1,则误差为 0.01。 这会惩罚犯大错误的模型并鼓励小错误。相比之下,L1对异常值的鲁棒性更好
Example
import torch
import torch.nn as nn
input = torch.tensor(
[[-0.5, -1.5],
[0.3, -1.3]], requires_grad=True
)
target = torch.tensor(
[[1.1, 0.5],
[0.5, -1.5]]
)
mse_loss = nn.MSELoss()
output = mse_loss(input, target)
output.backward()
print('input: ', input)
print('target: ', target)
print('output: ', output)
print('input.grad', input.grad)
- OUTPUT
input: tensor([[-0.5000, -1.5000],
[ 0.3000, -1.3000]], requires_grad=True)
target: tensor([[ 1.1000, 0.5000],
[ 0.5000, -1.5000]])
output: tensor(1.6600, grad_fn=<MseLossBackward>) # (1.6**2 + 2**2 + 0.2**2 +0.2**2)/4 = 1.66
input.grad tensor([[-0.8000, -1.0000],
[-0.1000, 0.1000]]) # (每个值求梯度[符号和target一样])/4 例如:- 2 * (1.1- (-0.5)) / 4 = -0.8
3. Smoth L1 Loss
- 公式
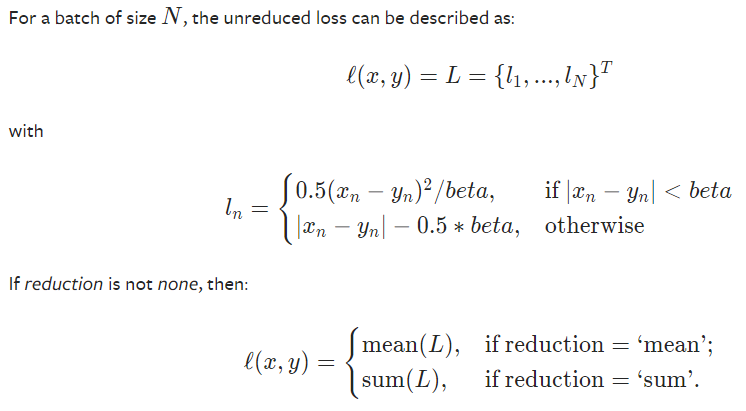
- Smoth L1 Loss的优点:
- 相比于L1损失函数,可以收验的更快。L1 Loss在0点处导数不唯一,可能影响收验。Smooth L1的解决方法是在0点使用平ping方使得更加平滑
- 相比于L2损失函数, 对离群点,异常值不敏感,梯度变化相对更加小,训练时不容易跑飞
4. Cross-Entropy Loss
该损失函数计算提供的一组出现次数或者随机变量的两个概率分布之间的差异。值在0-1之间。
其他的损失函数,例如平(ping)方损失惩罚不正确的预测 负对数似然损失不对预测置信度惩罚,Cross-Entropy惩罚不正确但可信的预测(例如把狗预测成猫并且confidence=0.9),以及正确但是不可信的预测(例如: 预测对是狗这个类别但是confidence=0.1)
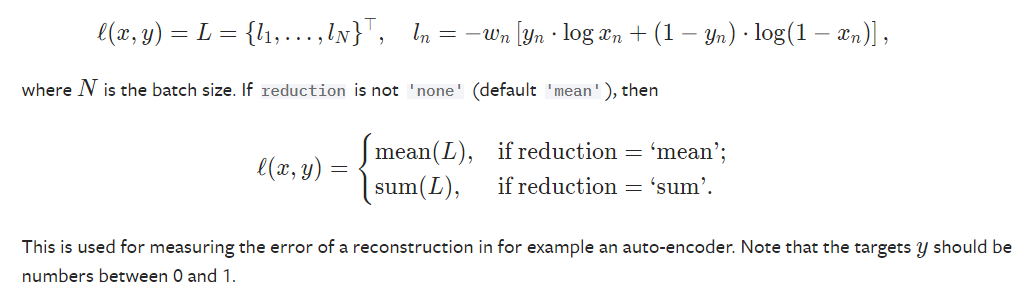
Cross-Entropy有许多种变体,其中最常见的类型是Binary Cross-Entropy(BCE)。BCE Loss主要用于二分类模型即是该模型只有两个类别
- 表达公式
- softmax表达式:
- Cross-Entropy表达式
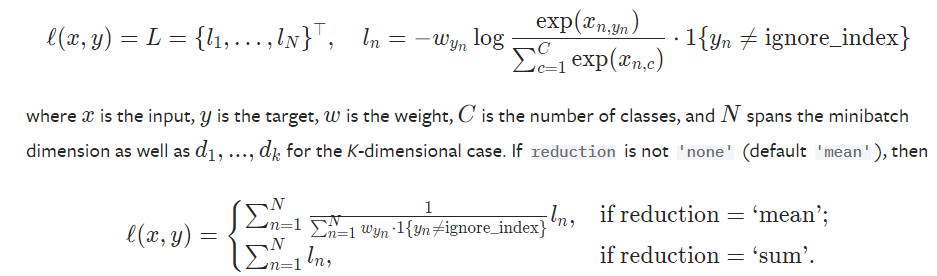
说明: 在pytorch中值是经过softmax处理过的,并且默认是'mean'处理 可参考: https://stackoverflow.com/questions/49390842/cross-entropy-in-pytorch
应用场景: 二分类和多分类
softmax和Cross-entropy求导证明
参考
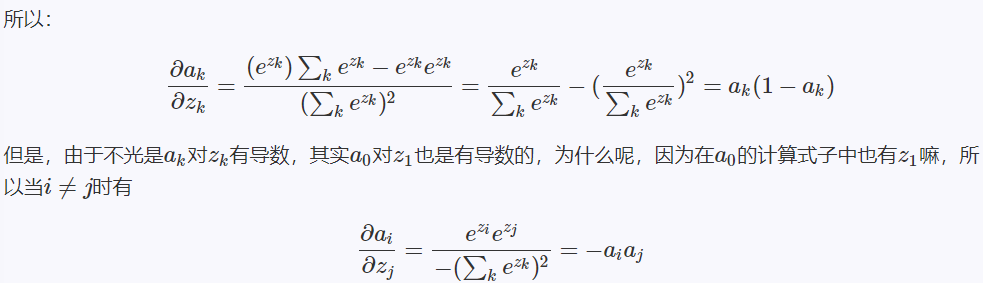
- Softmax求导

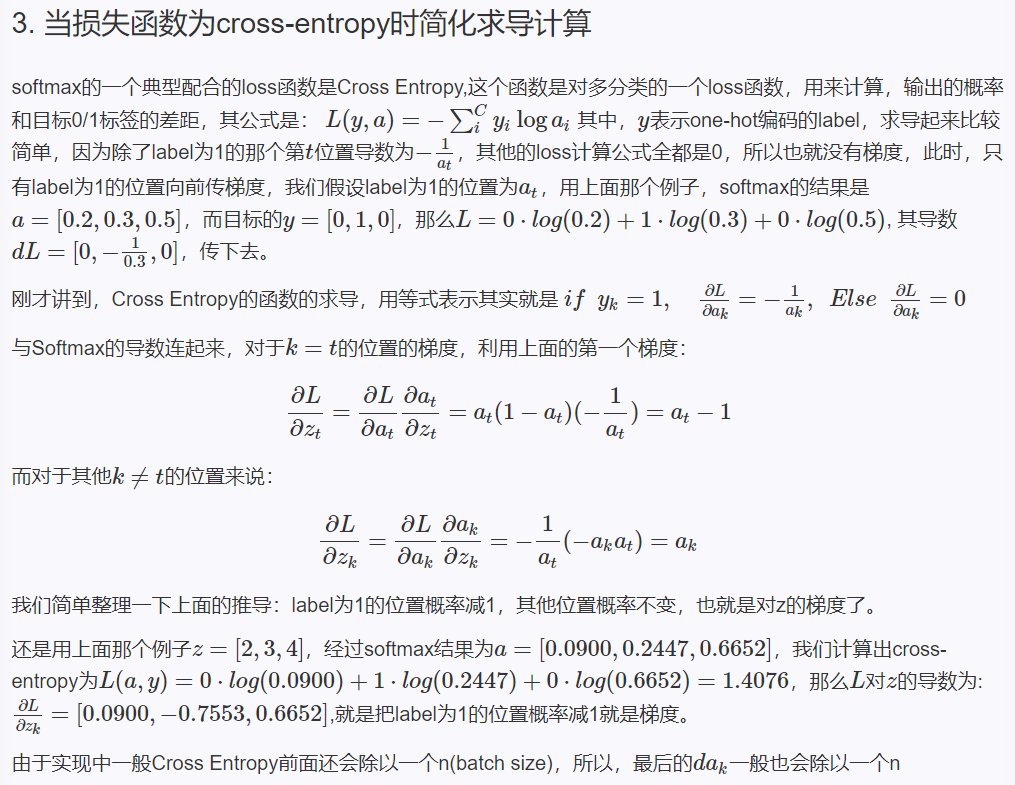
- Cross-Entropy求导
- Example1: 上面证明的代码
import torch
import torch.nn as nn
input = torch.tensor(
[[2., 3., 4.]], requires_grad=True
)
print('softmax:', torch.softmax(input, dim=1))
target = torch.tensor( # 表示上述位置为1的位置
[1], dtype=torch.long
)
cross_entropy_loss = nn.CrossEntropyLoss()
output = cross_entropy_loss(input, target)
output.backward()
# print('input: ', input)
# print('target: ', target)
print('output: ', output)
print('input.grad: ', input.grad)
- OUTPUT 求导证明的输出
softmax: tensor([[0.0900, 0.2447, 0.6652]], grad_fn=<SoftmaxBackward>)
output: tensor(1.4076, grad_fn=<NllLossBackward>) # 根据公式 -1*ln(0.2447) = 1.4076
input.grad: tensor([[ 0.0900, -0.7553, 0.6652]]) # 根据求导公式 不是该位置的值为softmax后值(0.0900,0.6652),该位置值=0.2447-1(-0.7553)
- Example2: 更加复杂点的
input = torch.tensor(
[[0.3, 0.8, 0.5],
[0.3, 0.3, 0.4],
[0.3, 0.3, 0.3]
], requires_grad=True
)
print('softmax:', torch.softmax(input, dim=1))
target = torch.tensor( # x
[0, 2, 1], dtype=torch.long
)
cross_entropy_loss = nn.CrossEntropyLoss()
output = cross_entropy_loss(input, target)
output.backward()
# print('input: ', input)
# print('target: ', target)
print('output: ', output)
print('input.grad: ', input.grad)
- OUTPUT2
softmax: tensor([[0.2584, 0.4260, 0.3156],
[0.3220, 0.3220, 0.3559],
[0.3333, 0.3333, 0.3333]], grad_fn=<SoftmaxBackward>)
output: tensor(1.1617, grad_fn=<NllLossBackward>) # -(ln(0.2584)+ln(0.3559)+ln(0.3333)) = 1.1617
input.grad: tensor([[-0.2472, 0.1420, 0.1052], # -0.2472=(0.2584-1)/3(为什么除以3见证明最后一句) 0.1420 = 0.4260/3
[ 0.1073, 0.1073, -0.2147],
[ 0.1111, -0.2222, 0.1111]])
5. BCE Loss(Binary Cross-Entropy)
BCE Loss主要用于二分类模型即是该模型只有两个类别, 其中target需要介于0-1之间,所以在BCELoss之前,input一般为sigmod激活层的输出。其中sigmod的导数和softmax的一样所以也可以使用上面的证明。
也就是说:如果该位置为1,那么导数为-(sigmod后的值-1)/N, 如果该位置值为0,那么导数为-(sigmod后的值)/N
BCE Loss用于二分类或者多标签分类。例如YOLOv3的置信度损失使用的就是BCE Loss
(例如yn表示目标边界框与真实框的iou[正样本取1负样本取0],xn为通过sigmod得到的预测置信度,N为正样本个数)
在YOLOv3中,类别损失也是使用BCE Loss, yn取0或者1,表示预测目标边界框i中是否存在第j类目标,xn为预测值,N为正样本个数
公式
Example
import torch
import torch.nn as nn
m = nn.Sigmoid()
loss = nn.BCELoss()
input = torch.randn((3, 3), requires_grad=True)
target = torch.empty((3, 3)).random_(2)
output = loss(m(input), target)
output.backward()
print("input", input)
print("sigmod(input)", m(input))
print("target", target)
print("output", output)
print("input.grad", input.grad)
- OUTPUT
input tensor([[-0.7722, -0.0539, 0.1969],
[-1.8228, 1.5270, 0.7037],
[-0.9524, 0.3780, -0.0544]], requires_grad=True)
sigmod(input) tensor([[0.3160, 0.4865, 0.5491],
[0.1391, 0.8216, 0.6690],
[0.2784, 0.5934, 0.4864]], grad_fn=<SigmoidBackward>)
target tensor([[1., 0., 0.],
[0., 0., 1.],
[0., 1., 0.]])
output tensor(0.7116, grad_fn=<BinaryCrossEntropyBackward>)
input.grad tensor([[-0.0760, 0.0541, 0.0610],
[ 0.0155, 0.0913, -0.0368],
[ 0.0309, -0.0452, 0.0540]])
- OUTPUT中的output计算方式为
第一个 1*ln(0.3160) + (1-0)*ln(1-0.4865) + (1-0)*ln(1-0.5491)
第二个 (1-0)*ln(1-0.1391) + (1-0)*ln(1-0.8216) + 1*ln(0.6690)
第三个 (1-0)*ln(1-0.2784) + 1*ln(0.5934) + (1-0)*ln(1-0.4864)
然后将这三个算出来的数加起来/9 然后再取负数
- OUTPUT中的input.grad计算公式为
计算公式可以按照Cross-Entropy的推导部分来:
target为1的位置计算为(sigmod(值)-1)/N, target为0的位置计算为(sigmod(值))/N
例如
[[(0.3136 - 1)/9=-0.0760, 0.4865/9=0.0541, 0.5491/9=0.0610],
[0.1391/9=0.0155, 0.8216/9=0.0913, (0.6690-1)/9=-0.0368],
[0.2784/9=0.0309, (0.5934-1)/9=-0.0452, 0.4864/9=0.0540]]
+++++++++++++++++++++++++++++++++++分界线+++++++++++++++++++++++++++++++++++++++++++++++
6. 其他IOU Loss以及Focal Loss
- 之前写的博客:https://www.cnblogs.com/zranguai/p/14587231.html
- 参考blogs1: IoU、GIoU、DIoU、CIoU损失函数的那点事儿
- 参考video1: b站视频
目标检测复习之Loss Functions 总结的更多相关文章
- 目标检测复习之Anchor Free系列
目标检测之Anchor Free系列 CenterNet(Object as point) 见之前的过的博客 CenterNet笔记 YOLOX 见之前目标检测复习之YOLO系列总结 YOLOX笔记 ...
- 目标检测复习之YOLO系列
目标检测之YOLO系列 YOLOV1: blogs1: YOLOv1算法理解 blogs2: <机器爱学习>YOLO v1深入理解 网络结构 激活函数(leaky rectified li ...
- 目标检测复习之Faster RCNN系列
目标检测之faster rcnn系列 paper blogs1: 一文读懂Faster RCNN Faster RCNN理论合集 code: mmdetection Faster rcnn总结: 网络 ...
- 目标检测 | RetinaNet:Focal Loss for Dense Object Detection
论文分析了one-stage网络训练存在的类别不平衡问题,提出能根据loss大小自动调节权重的focal loss,使得模型的训练更专注于困难样本.同时,基于FPN设计了RetinaNet,在精度和速 ...
- PIoU Loss:倾斜目标检测专用损失函数,公开超难倾斜目标数据集Retail50K | ECCV 2020 Spotlight
论文提出从IoU指标延伸来的PIoU损失函数,能够有效地提高倾斜目标检测场景下的旋转角度预测和IoU效果,对anchor-based方法和anchor-free方法均适用.另外论文提供了Retail5 ...
- 目标检测--Rich feature hierarchies for accurate object detection and semantic segmentation(CVPR 2014)
Rich feature hierarchies for accurate object detection and semantic segmentation 作者: Ross Girshick J ...
- [目标检测]YOLO原理
1 YOLO 创新点: 端到端训练及推断 + 改革区域建议框式目标检测框架 + 实时目标检测 1.1 创新点 (1) 改革了区域建议框式检测框架: RCNN系列均需要生成建议框,在建议框上进行分类与回 ...
- 目标检测网络之 YOLOv2
YOLOv1基本思想 YOLO将输入图像分成SxS个格子,若某个物体 Ground truth 的中心位置的坐标落入到某个格子,那么这个格子就负责检测出这个物体. 每个格子预测B个bounding b ...
- 【深度学习】目标检测算法总结(R-CNN、Fast R-CNN、Faster R-CNN、FPN、YOLO、SSD、RetinaNet)
目标检测是很多计算机视觉任务的基础,不论我们需要实现图像与文字的交互还是需要识别精细类别,它都提供了可靠的信息.本文对目标检测进行了整体回顾,第一部分从RCNN开始介绍基于候选区域的目标检测器,包括F ...
随机推荐
- API的自动化测试
传统的测试工具在测试一个API的时候,必须手动填写这个API所需要接收的所有信息,比如一个查询航班动态的API,他接收两个输入字段,一个叫flight, 一个叫date,那么测试这个API的用户,需要 ...
- 人机交互BS
B/S结构用户界面设计 [实验编号] 10003809548j Web界面设计 [实验学时] 8学时 [实验环境] l 所需硬件环境为微机: l 所需软件环境为dreamweaver ...
- 小程序拿checkbox的checked属性
方法一.checkbox <checkbox class="round red" bindtap="checkboxChange" checked=&q ...
- 【C++】二叉树的遍历(前中后)- 迭代法
力扣题目:https://leetcode-cn.com/problems/binary-tree-inorder-traversal/ 今天自己琢磨了很久如何不用递归将二叉树的遍历写出来,于是乎写出 ...
- kali添加开机自启[亲测有效]
kali添加开机自启 采用systemd的方法,kali默认是没有rc.local的,需要自己创建.本方法也适用于ubuntu 18.04 64bit 改写rc-local.service 文件 先从 ...
- 导出带标签的tar包(docker)-解决导出不带标签的麻烦
需求:在docker的本地镜像库中导出tar包给其他节点使用. 如果使用:docker save -o package.tar e82656a6fc 这样形式导出的tar包,安装之后标签会消失解决办法 ...
- linux磁盘之lsblk命令
lsblk命令可以显示很多跟磁盘相关分区.所属关系以及lvm的重要信息,所以这个命令最好掌握.lsblk命令默认情况下将以树状列出所有块设备,包括查看磁盘挂载信息.lsblk命令包含在util-lin ...
- linux中sort、uniq、cut、tr、wc命令的使用
文本处理命令 1.sort命令 使用场景 : 用于将文件内容加以排序(可以和cat一起用) 参数 作用 -n 依照数值的大小排序 -r 以相反的顺序来排序(默认只比较第一个数,-rn是按所有数值比较) ...
- &&与&,||与| 区别
1. &&和&都是表示与,区别是&&只要第一个条件不满足,后面条件就不再判断. 而&要对所有的条件都进行判断. public class Test { ...
- 日志、第三方模块(openpyxl模块)
目录 1.日志模块 2.第三方模块 内容 日志模块 1.日志模块的主要组成部分 1.logger对象:产生日志 无包装的产品 import logging logger = logging.getLo ...