4.3 ROS工作空间覆盖
4.3 ROS工作空间覆盖
所谓工作空间覆盖,是指不同工作空间中,存在重名的功能包的情形。
ROS 开发中,会自定义工作空间且自定义工作空间可以同时存在多个,可能会出现一种情况: 虽然特定工作空间内的功能包不能重名,但是自定义工作空间的功能包与内置的功能包可以重名或者不同的自定义的工作空间中也可以出现重名的功能包,那么调用该名称功能包时,会调用哪一个呢?比如:自定义工作空间A存在功能包 turtlesim,自定义工作空间B也存在功能包 turtlesim,当然系统内置空间也存在turtlesim,如果调用turtlesim包,会调用哪个工作空间中的呢?
实现
0.新建工作空间A与工作空间B,两个工作空间中都创建功能包: turtlesim。
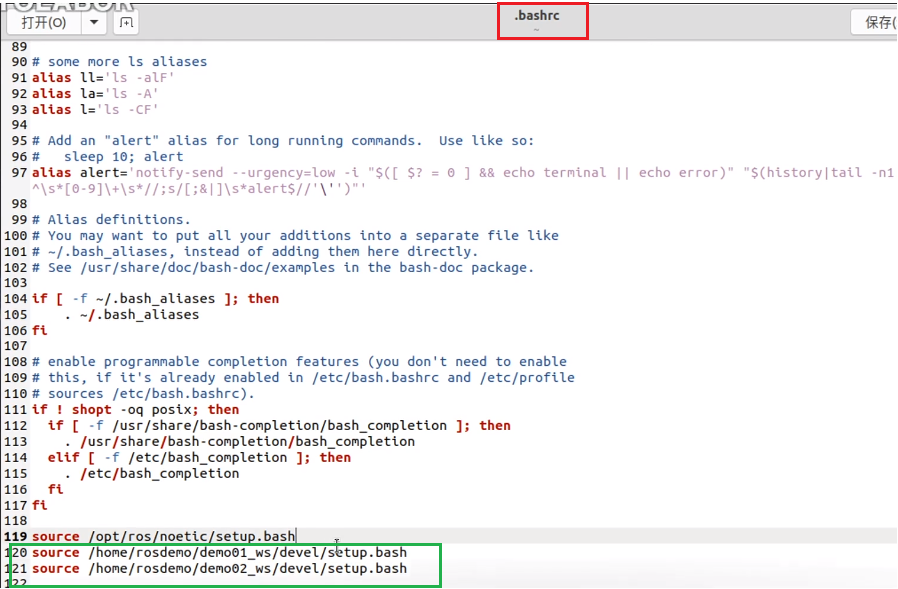
1.在 ~/.bashrc 文件下追加当前工作空间的 bash 格式如下:
source /home/用户/路径/工作空间A/devel/setup.bash
source /home/用户/路径/工作空间B/devel/setup.bas
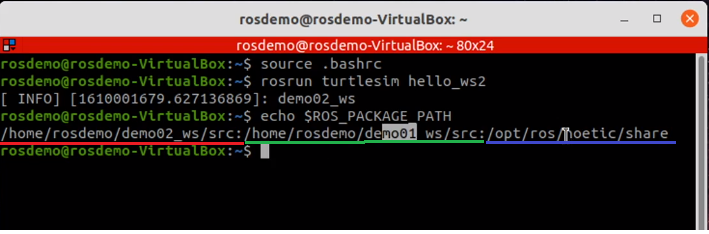
2.新开命令行:source .bashrc加载环境变量
3.查看ROS环境环境变量echo $ROS_PACKAGE_PATH
结果:自定义工作空间B:自定义空间A:系统内置空间
4.调用命令:roscd turtlesim会进入自定义工作空间B
原因
ROS 会解析 .bashrc 文件,并生成 ROS_PACKAGE_PATH ROS包路径,该变量中按照 .bashrc 中配置设置工作空间优先级,在设置时需要遵循一定的原则:ROS_PACKAGE_PATH 中的值,和 .bashrc 的配置顺序相反--->后配置的优先级更高,如果更改自定义空间A与自定义空间B的source顺序,那么调用时,将进入工作空间A。
结论
功能包重名时,会按照 ROS_PACKAGE_PATH 查找,配置在前的会优先执行。
隐患
存在安全隐患,比如当前工作空间B优先级更高,意味着当程序调用 turtlesim 时,不会调用工作空间A也不会调用系统内置的 turtlesim,如果工作空间A在实现时有其他功能包依赖于自身的 turtlesim,而按照ROS工作空间覆盖的涉及原则,那么实际执行时将会调用工作空间B的turtlesim,从而导致执行异常,出现安全隐患。
BUG 说明:
当在 .bashrc 文件中 source 多个工作空间后,可能出现的情况,在 ROS PACKAGE PATH 中只包含两个工作空间,可以删除自定义工作空间的 build 与 devel 目录,重新 catkin_make,然后重新载入 .bashrc 文件,问题解决。
4.3 ROS工作空间覆盖的更多相关文章
- 创建一个ROS工作空间(ROS Workspace)
详细参照 http://wiki.ros.org/ROS/Tutorials/InstallingandConfiguringROSEnvironment1.mkdir -p ~/catkin_ws/ ...
- ROS Learning-003 beginner_Tutorials 创建ROS工作空间
ROS Indigo beginner_Tutorials-02 创建ROS工作空间 我使用的虚拟机软件:VMware Workstation 11 使用的Ubuntu系统:Ubuntu 14.04. ...
- ros 工作空间下cpp文件调用其他cpp文件的函数或变量
最近在学习ros节点编程,在工作空间下添加如下文件: message.h #ifndef MESSAGE_H #define MESSAGE_H extern int n; void init_ros ...
- 创建ROS 工作空间时出现:程序“catkin_init_workspace”尚未安装,程序“catkin_make”尚未安装。
问题:创建ROS 工作空间时出现:程序“catkin_init_workspace”尚未安装,程序“catkin_make”尚未安装. 解决方法: source /opt/ros/kinetic/se ...
- QT打开ROS工作空间时遇到的问题和解决方法
之前一直觉得不用IDE写程序看着好像我很能的样子. 其实就相当于工业时代我还钻木取火并且告诉别人你们用打火机根本不知道火被点燃的过程是怎样的. 因为这个技能并非人人都会,就可以拿出去到处臭屁 好了, ...
- 多个ROS工作空间常见的问题
1. 在/home/user_name/.bashrc文件中写入多个工作空间的环境变量,这样会导致环境变量之间相互覆盖.最常见的问题就是找不到工作空间中某个launch文件.节点.rviz插件等. 解 ...
- ROS工作空间和程序包创建
预备工作后面操作中我们将会用到ros-tutorials程序包,请先安装: $ sudo apt-get install ros-<distro>-ros-tutorials 将 < ...
- (二)创建ROS工作空间
ROS 教程中涉及的和编写的所有 ROS 代码需要有一个地方存放它,这个地方叫做工作空间.可以说,这个工作空间应该是一个大的集合.当我们要编译程序的时候,我们是对整个工作空间进行编译的. 这个工作空 ...
- 创建ROS工作空间和包
一.创建工作空间 mkdir -p ~/openni_ws/src cd ~/openni_ws catkin_make //在catkin工作空间(openni_ws)下catkin_ ...
随机推荐
- Python:读取Excel 不带第一行标题
#根据第0到第1列进行重建 0-X 1-Y PX=sheet_name.col_values(0)[1:] PY=sheet_name.col_values(1)[1:] 读取的某一列后在后边加[1: ...
- Pycharm:设置自带控制台的python版本
之前在用chr将一个编码转化为对应的字符时,出现以下提示 chr() arg not in range(256) 后来发现,只有python2.x才会出现这种情况,python3.x统一使用unico ...
- js和C# 编码 解码
C#中对URL编码的方法... 编码:Server.UrlEncode(string) 解码:Server.UrlDecode(string) HttpUtility.UrlEncode(string ...
- WPF启动屏幕SplashScreen
SplashScreen类为WPF应用程序提供启动屏幕. 方法一:设置图片属性 1. 添加启动图片到项目中 2. 设置图片属性的Build Action为SplashScreen 方法二:编写代码 1 ...
- Spring Cloud Gateway actuator组建对外暴露RCE问题漏洞分析
Spring Cloud gateway是什么? Spring Cloud Gateway是Spring Cloud官方推出的第二代网关框架,取代Zuul网关.网关作为流量的,在微服务系统中有着非常作 ...
- 基于NopCommerce框架开发的微信小程序UrShop
Urshop小程序商城 介绍 UrShop小程序商城 2.0发布啦,发布地址https://gitee.com/urselect/urshop UrShop 根据NopCommerce框架开发的,基于 ...
- 基于ESP8266+BY8301语音模块的与山地车捉迷藏的小项目
基于ESP8266+BY8301语音模块的与山地车捉迷藏的小项目 写在前面: 不知道大家有没有经历过,在茫茫车海中找不到自己山地车情况,针对这个痛点(开玩笑的),我做了个小玩意,纯属娱乐,拿出来,在疫 ...
- Java 代码注意细节
代码优化的目标是: 1.减小代码的体积 2.提高代码运行的效率 代码优化细节 1.尽量指定类.方法的final修饰符 带有final修饰符的类是不可派生的.在Java核心API中,有许多应用final ...
- Mybatis执行流程浅析
从三个主要的对象SqlSessionFactoryBuilder->SqlSessionFactory->SqlSession说起 inputStream = Resources.getR ...
- web服务器-nginx默认网站
web服务器-nginx默认网站 一 默认网站 server { listen 80; server_name localhost; location / { root html; index ind ...