6 Sampling Configuration Space: 6.4 Adaptive Steered Molecular Dynamics
6.4 Adaptive Steered Molecular Dynamics
理论背景:
SMD 利用施加steering力的伪粒子,以便以特定速度穿过反应坐标。 这个外力允许人们在MD模拟时间尺度的范围内观察分子的变化。 采用 Jarzynski 等式,在 SMD 模拟期间对系统执行的非平衡功可能与状态 A 和 B 之间的自由能差有关
ASMD整体感觉相当于“多条SMD+JE等式,然后取平均” 的另一种方式。对于SMD来说,必须多次运行,才能获得收敛的PMF曲线。ASMD已经被证明可以缓解这个问题,在ASMD中,预定的反应坐标被划分为段,在这些段中执行SMD,并在这个段中计算Jarzynski average (JA) 。在段之间,选择“work value”最接近JA平均值的轨迹,使用这个轨迹的最终坐标rst7用于初始化下一段的SMD。 这样,可以减少需要执行的SMD轨迹数量。
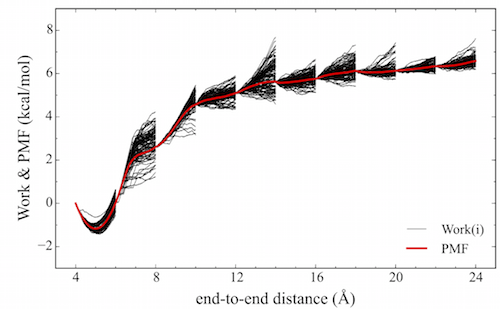
从 ASMD 模拟中获得的PMF(红色)示意图。 此外,突出显示的是每个段的work 分布(黑色)
计算过程:
1、首先对体系进行经典的MD,获得平衡构型。
2、执行ASMD
这一部分可以参考官网(http://ambermd.org/tutorials/advanced/tutorial26/section2.php),给出了shell脚本,可以方便地产生不同阶段的输入。
大致过程就是先将反应坐标分为若干段。首先考察第一段,运行多次SMD后,使用脚本计算Jarzynski average (JA),然后找到与JA最接近的SMD轨迹,然后使用这个SMD轨迹的最后一帧作为考察第二段的初始坐标,依次往后进行。
注意:①确定拉动速度→比如说100埃/ns,一共要拉伸4埃,那么拉伸的时间就设置为20000步(40000fs)②SMD会自动产生“目标距离,实际距离,力,和功”
3、重构PMF
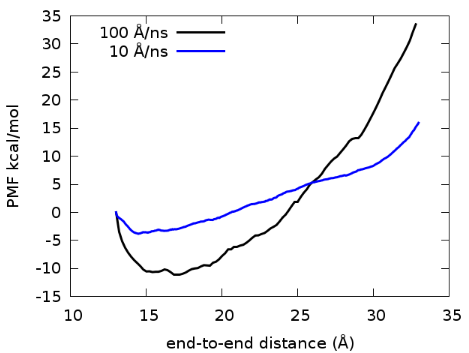
ASMD完成后,需要拼接每个阶段的PMF输出,以获得不同速度下每个模拟的实际 PMF。这里提供了脚本 create.PMF.py. ,可以轻松完成这个工作。
6 Sampling Configuration Space: 6.4 Adaptive Steered Molecular Dynamics的更多相关文章
- 机器人学 —— 轨迹规划(Configuration Space)
之前的轨迹规划中,我们只考虑了质点,没有考虑机器人的外形与结构.直接在obstacle map 中进行轨迹规划,然而世纪情况中,机器人有固定外形,可能会和障碍物发生碰撞.此情况下,我们针对机器人自由度 ...
- 机器人运动规划中的构形空间(Configuration Space)
A key concept in motion planning is configuration space, or C-space for short. Every point in the C- ...
- Adaptive Synchronization of Dynamics on Evolving Complex Networks
原文链接:https://journals.aps.org/prl/abstract/10.1103/PhysRevLett.100.114101 发表在:PRL 2008 ------------- ...
- PCI & PCIE Configuration Register Space
1.PCI-Compatible Configurationbits [1:0] are hard-wired, read-only and must return zeros when read.b ...
- 机器人学 —— 轨迹规划(Sampling Method)
上一篇提到,机器人轨迹规划中我们可以在 Configuration Space 中运行A* 或者 DJ 算法.无论A* 还是DJ 算法,都必须针对邻域进行搜索,如果2自由度则有4邻域,2自由度则有8邻 ...
- [中英对照]Device Drivers in User Space: A Case for Network Device Driver | 用户态设备驱动: 以网卡驱动为例
前文初步介绍了Linux用户态设备驱动,本文将介绍一个典型的案例.Again, 如对Linux用户态设备驱动程序开发感兴趣,请阅读本文,否则请飘过. Device Drivers in User Sp ...
- zhihu spark集群,书籍,论文
spark集群中的节点可以只处理自身独立数据库里的数据,然后汇总吗? 修改 我将spark搭建在两台机器上,其中一台既是master又是slave,另一台是slave,两台机器上均装有独立的mongo ...
- Procedural graphics architectures and techniques
BACKGROUND The evolution of graphics rendering technology has led to the development of procedural t ...
- Massively parallel supercomputer
A novel massively parallel supercomputer of hundreds of teraOPS-scale includes node architectures ba ...
- Monitoring and Tuning the Linux Networking Stack: Receiving Data
http://blog.packagecloud.io/eng/2016/06/22/monitoring-tuning-linux-networking-stack-receiving-data/ ...
随机推荐
- JQuery电梯导航
// .zjong .dag_id 内容区// .zuoyou .dao_hang a 电梯按钮 $(function() { $(".zjong .dag_id").each(( ...
- 语言-页面-模板-Velocity
Velocity教程 - 简书 (jianshu.com) Velocity模板引擎详解 - Velocity 教程 | 编程字典 (codingdict.com) Velocity模板(VM)语言介 ...
- 谈谈 Redis 的过期策略
在日常开发中,我们使用 Redis 存储 key 时通常会设置一个过期时间,但是 Redis 是怎么删除过期的 key,而且 Redis 是单线程的,删除 key 会不会造成阻塞.要搞清楚这些,就要了 ...
- curl 与 header 及 file_get_countents 访问内容时的区别
在开发中 想用curl 或者是file_get_contents 模拟请求或者是获取数据时 ,经常会发现获取到的内容与想象中的不一样,主要原因在与这两个走得host要走外网,在内网及测试环境下host ...
- 三种将list转换为map的方法
1) 传统方法假设有某个类如下 Java代码 class Movie { private Integer rank; private String description; public Movie( ...
- ubuntu 快速安装ninja和gn
安装ninja: sudo apt install ninja-build 安装gn: sudo apt install generate-ninja
- JS篇(006)-怎样添加、移除、移动、复制、创建和查找节点?
答案: 1)创建新节点 createDocumentFragment() //创建一个 DOM 片段 createElement() //创建一个具体的元素 createTextNode() //创建 ...
- java面向对象九个经典例子程序
1 Hello world例子 1 package Example; //定义自己的包名 2 3 public class Example1 //定义一个类 4 { 5 public static v ...
- 浏览器F12,Network中各按钮的作用
Network下 preserve log:勾选,页面发生跳转,接口不丢失:(比如登录成功跳转到首页,登录的接口就没了,勾选Perserve log,会记录跳转前的接口): Disable cache ...
- 【七侠传】冲刺阶段--Day7
[七侠传]冲刺阶段--Day7 团队成员 20181221曾宇涛 20181202李祎铭 20181209沙桐 20181215薛胜瀚 20181216杨越麒 20181223何家豪 20181232 ...