SLAM概念学习之特征图Feature Maps
特征图(或者叫地标图,landmark maps)利用参数化特征(如点和线)的全局位置来表示环境。如图1所示,机器人的外部环境被一些列参数化的特征,即二维坐标点表示。这些静态的地标点被观测器(装有传感器的机器人)利用多目标跟踪的方法跟踪,从而估计机器人的运动。
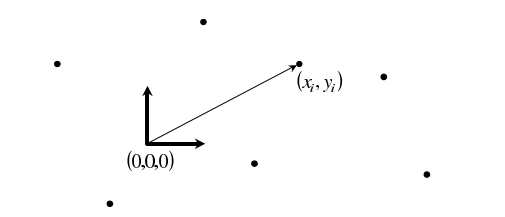
Fig.1 Feature maps.
机器人的定位是通过建立传感器观测特征和图map中特征之间的关系来确定的。预测特征的位置和量测特征位置之间的差别被用来计算机器人的位姿。这种方式,类似于多目标跟踪问题,但是不想传统的多目标跟踪问题,这里的目标群是静止的,但是观测的机器人是运动的。
先验特征图里面的地标位置被假设已知的,因此每个特征都很容易被一个参数集表示。假设机器人的量测,即从环境中提取的特征被正确地关联到图中的已有特征,我们就可以利用标准的估计技术如EKF来跟踪机器人的位姿。因此,数据关联(data association)是基于特征图的定位实现的主要弱点。
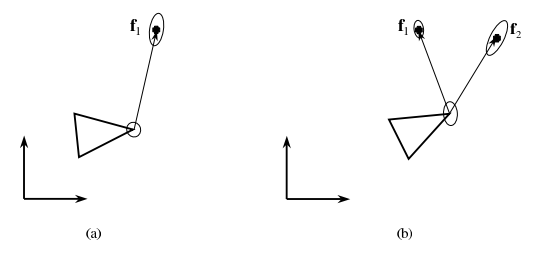
Fig.2 SLAM中不确定性的相关性分析
基于特征图的SLAM包含两个主要任务,首先需要将机器人上传感器新观测到的特征添加到Map中,新特征的添加是基于此时机器人位姿作为参考的;另一个任务是利用Map中现有的特征来估计机器人的位姿。传感器测量的不确定性将会导致机器人位姿和观测特征定位的确定,这些不确定性是相互依赖或者说相互关联的。如图2所示,在(a)中,机器人观测到f1,并初始化f1,因此该特征的定位便依赖于此时机器人的位姿。在下一个时刻(b),机器人再次观测到f1,并初始化新特征f2。因此,新特征f2的初始化便依赖于该时刻机器人的位姿估计,在初始化新特征的同时,机器人位姿的估计将反过来依赖于已观测特征f1。
下一节,我们将介绍基于Feature maps的随机SLAM算法。
SLAM概念学习之特征图Feature Maps的更多相关文章
- SLAM概念学习之随机SLAM算法
这一节,在熟悉了Featue maps相关概念之后,我们将开始学习基于EKF的特征图SLAM算法. 1. 机器人,图和增强的状态向量 随机SLAM算法一般存储机器人位姿和图中的地标在单个状态向量中,然 ...
- pytorch中网络特征图(feture map)、卷积核权重、卷积核最匹配样本、类别激活图(Class Activation Map/CAM)、网络结构的可视化方法
目录 0,可视化的重要性: 1,特征图(feture map) 2,卷积核权重 3,卷积核最匹配样本 4,类别激活图(Class Activation Map/CAM) 5,网络结构的可视化 0,可视 ...
- 卷积神经网络特征图可视化(自定义网络和VGG网络)
借助Keras和Opencv实现的神经网络中间层特征图的可视化功能,方便我们研究CNN这个黑盒子里到发生了什么. 自定义网络特征可视化 代码: # coding: utf-8 from keras.m ...
- 卷积网络中的通道(Channel)和特征图
转载自:https://www.jianshu.com/p/bf8749e15566 今天介绍卷积网络中一个很重要的概念,通道(Channel),也有叫特征图(feature map)的. 首先,之前 ...
- 深度学习之加载VGG19模型获取特征图
1.加载VGG19获取图片特征图 # coding = utf-8 import tensorflow as tf import numpy as np import matplotlib.pyplo ...
- CNN可视化技术总结(一)--特征图可视化
导言: 在CV很多方向所谓改进模型,改进网络,都是在按照人的主观思想在改进,常常在说CNN的本质是提取特征,但并不知道它提取了什么特征,哪些区域对于识别真正起作用,也不知道网络是根据什么得出了分类结果 ...
- 机器学习入门09 - 特征组合 (Feature Crosses)
原文链接:https://developers.google.com/machine-learning/crash-course/feature-crosses/ 特征组合是指两个或多个特征相乘形成的 ...
- Keras中间层输出的两种方式,即特征图可视化
训练好的模型,想要输入中间层的特征图,有两种方式: 1. 通过model.get_layer的方式.创建新的模型,输出为你要的层的名字. 创建模型,debug状态可以看到模型中,base_model/ ...
- 特征工程(Feature Engineering)
一.什么是特征工程? "Feature engineering is the process of transforming raw data into features that bett ...
随机推荐
- Hua Wei 机试题目三---2014
一.根据对应规则进行翻译输出 描述:已知有如下的对应规则: ,则输入任意个正整数,输出经过规则翻译以后对应的结果. 例如:输入:1234:输出bcde. 题目很简单,我觉得需要注意的问题就是对于大整数 ...
- Edge浏览器+微软小娜
- 洛谷P1962 斐波那契数列(矩阵快速幂)
题目背景 大家都知道,斐波那契数列是满足如下性质的一个数列: • f(1) = 1 • f(2) = 1 • f(n) = f(n-1) + f(n-2) (n ≥ 2 且 n 为整数) 题目描述 请 ...
- 洛谷P3358 最长k可重区间集问题(费用流)
题目描述 对于给定的开区间集合 I 和正整数 k,计算开区间集合 I 的最长 k可重区间集的长度. 输入输出格式 输入格式: 的第 1 行有 2 个正整数 n和 k,分别表示开区间的个数和开区间的可重 ...
- onTouchEvent事件
@Override public boolean onTouchEvent(MotionEvent event) { if(event.getAction() == MotionEvent.ACTIO ...
- js 基本基础知识回顾
js中的一切的变量.函数.操作符等等都是区分大小写的. js的基本的数据类型->包含下面的5种: 1.undefined 2.Null 3.Boolean 4.Number 5.String j ...
- Projective Texture Mapping - 投影纹理
昨天导师让写一个投影纹理,将一个相机渲染的图片的一部分投影到另外一个相机里面,目的是无缝的拼接. 投影纹理就和shadow map一样,都是将片元转换到另外一个相机/光源坐标系下,投影后找到对应的纹素 ...
- ___Manacher(线性回文子串处理算法)
昨晚的bc做得好忧郁----- 第一题改了好久好久好久----等改完发现比赛已经结束了(发现是枚举子集的位运算那儿写错了--) 第二题是判断能否将一个字符串划分成三段回文串 今天学了一点点 Mana ...
- Pyhton二级操作题练习
# 1.编写一个python程序,输入两个数,比较它们的大小并输出其中较大者. num1 = input('请输入数字X:') num2 = input('请输入数字Y:') if num1.isde ...
- [USACO17FEB] Why Did the Cow Cross the Road I P (树状数组求逆序对 易错题)
题目大意:给你两个序列,可以序列进行若干次旋转操作(两个都可以转),对两个序列相同权值的地方连边,求最少的交点数 记录某个值在第一个序列的位置,再记录第二个序列中某个值 在第一个序列出现的位置 ,求逆 ...