OpenCV特征点检测------ORB特征
OpenCV特征点检测------ORB特征
ORB是是ORiented Brief的简称。ORB的描述在下面文章中:
Ethan Rublee and Vincent Rabaud and Kurt Konolige and Gary Bradski, ORB: an efcient alternative to SIFT or SURF, ICCV 2011
没有加上链接是因为作者确实还没有放出论文,不过OpenCV2.3RC中已经有了实现,WillowGarage有一个talk也提到了这个算法,因此我不揣浅陋,在这里总结一下。
Brief是Binary Robust Independent Elementary Features的缩写。这个特征描述子是由EPFL的Calonder在ECCV2010上提出的。主要思路就是在特征点附近随机选取若干点对,将这些 点对的灰度值的大小,组合成一个二进制串,并将这个二进制串作为该特征点的特征描述子。详细算法描述参考如下论文:
注意在BRIEF eccv2010的文章中,BRIEF描述子中的每一位是由随机选取的两个像素点做二进制比较得来的。文章同样提到,在此之前,需要选取合适的gaussian kernel对图像做平滑处理。(为什么要强调这一点,因为下述的ORB对此作了改进。)
BRIEF的优点在于速度,缺点也相当明显:
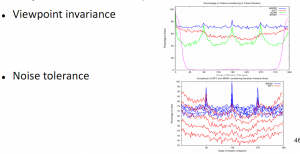
1:不具备旋转不变性。
2:对噪声敏感
3:不具备尺度不变性。
ORB就是试图解决上述缺点中的1和2.
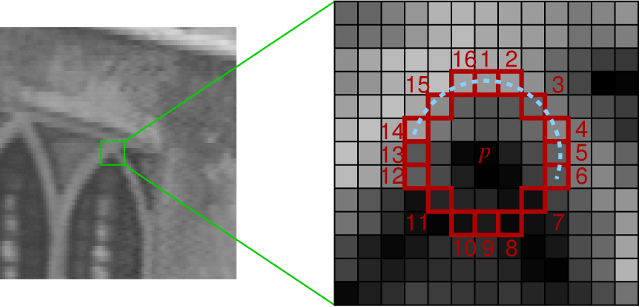
如何解决旋转不变性:
在ORB的方案中,是采用了FAST作为特征点检测算子。FAST应用的很多了,是出名的快,以防有人不知道,请看这里:
在Sift的方案中,特征点的主方向是由梯度直方图的最大值和次大值所在的bin对应的方向决定的。略嫌耗时。
在ORB的方案中,特征点的主方向是通过矩(moment)计算而来,公式如下:

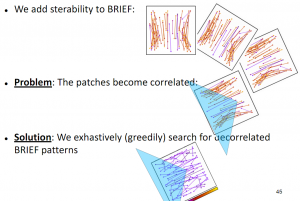
有了主方向之后,就可以依据该主方向提取BRIEF描述子。但是由此带来的问题是,由于主方向会发生变化,随机点对的相关性会比较大,从而降低描述子的判别性。解决方案也很直接,采取贪婪的,穷举的方法,暴力找到相关性较低的随机点对。
如何解决对噪声敏感的问题:
在前面提到过,在最早的eccv2010的文章中,BRIEF使用的是pixel跟pixel的大小来构造描述子的每一个bit。这样的后果就是对 噪声敏感。因此,在ORB的方案中,做了这样的改进,不再使用pixel-pair,而是使用9×9的patch-pair,也就是说,对比patch的 像素值之和。(可以通过积分图快速计算)。
关于尺度不变性:
ORB没有试图解决尺度不变性,(因为FAST本身就不具有尺度不变性。)但是这样只求速度的特征描述子,一般都是应用在实时的视频处理中的,这样的话就可以通过跟踪还有一些启发式的策略来解决尺度不变性的问题。
关于计算速度:
ORB是sift的100倍,是surf的10倍。
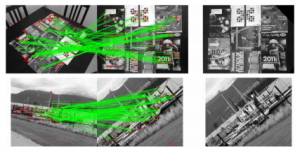
关于性能:
下面是一个性能对比,ORB还是很给力。点击看大图。
Related posts
最新版的OpenCV中新增加的ORB特征的使用
分类: Opencv学习C++2011-11-30 12:1511612人阅读评论(16)收藏举报
floatimagedistancevectorobjectless
看到OpenCV2.3.1里面ORB特征提取算法也在里面了,套用给的SURF特征例子程序改为ORB特征一直提示错误,类型不匹配神马的,由于没有找到示例程序,只能自己找答案。
(ORB特征论文:ORB: an efficient alternative to SIFT or SURF.点击下载论文)
经过查找发现:
描述符数据类型有是float的,比如说SIFT,SURF描述符,还有是uchar的,比如说有ORB,BRIEF
对于float 匹配方式有:
FlannBased
BruteForce<L2<float> >
BruteForce<SL2<float> >
BruteForce<L1<float> >
对于uchar有:
BruteForce<Hammin>
BruteForce<HammingLUT>
BruteForceMatcher< L2<float> > matcher;//改动的地方
完整代码如下:
#include <iostream>
#include "opencv2/core/core.hpp"
#include "opencv2/features2d/features2d.hpp"
#include "opencv2/highgui/highgui.hpp"
#include <iostream>
#include <vector>
using namespace cv;
using namespace std;
int main()
{
Mat img_1 = imread("D:\\image\\img1.jpg");
Mat img_2 = imread("D:\\image\\img2.jpg");
if (!img_1.data || !img_2.data)
{
cout << "error reading images " << endl;
return -1;
} ORB orb;
vector<KeyPoint> keyPoints_1, keyPoints_2;
Mat descriptors_1, descriptors_2; orb(img_1, Mat(), keyPoints_1, descriptors_1);
orb(img_2, Mat(), keyPoints_2, descriptors_2); BruteForceMatcher<HammingLUT> matcher;
vector<DMatch> matches;
matcher.match(descriptors_1, descriptors_2, matches); double max_dist = 0; double min_dist = 100;
//-- Quick calculation of max and min distances between keypoints
for( int i = 0; i < descriptors_1.rows; i++ )
{
double dist = matches[i].distance;
if( dist < min_dist ) min_dist = dist;
if( dist > max_dist ) max_dist = dist;
}
printf("-- Max dist : %f \n", max_dist );
printf("-- Min dist : %f \n", min_dist );
//-- Draw only "good" matches (i.e. whose distance is less than 0.6*max_dist )
//-- PS.- radiusMatch can also be used here.
std::vector< DMatch > good_matches;
for( int i = 0; i < descriptors_1.rows; i++ )
{
if( matches[i].distance < 0.6*max_dist )
{
good_matches.push_back( matches[i]);
}
} Mat img_matches;
drawMatches(img_1, keyPoints_1, img_2, keyPoints_2,
good_matches, img_matches, Scalar::all(-1), Scalar::all(-1),
vector<char>(), DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS);
imshow( "Match", img_matches);
cvWaitKey();
return 0;
}
另外: SURF SIFT
/*
SIFT sift;
sift(img_1, Mat(), keyPoints_1, descriptors_1);
sift(img_2, Mat(), keyPoints_2, descriptors_2);
BruteForceMatcher<L2<float> > matcher;
*/
/*
SURF surf;
surf(img_1, Mat(), keyPoints_1);
surf(img_2, Mat(), keyPoints_2);
SurfDescriptorExtractor extrator;
extrator.compute(img_1, keyPoints_1, descriptors_1);
extrator.compute(img_2, keyPoints_2, descriptors_2);
BruteForceMatcher<L2<float> > matcher;
*/
效果:
另外一个是寻找目标匹配
在右边的场景图里面寻找左边那幅图的starbucks标志
效果如下:

需要在之前的那个imshow之前加上如下代码即可完成一个简单的功能展示:
// localize the object
std::vector<Point2f> obj;
std::vector<Point2f> scene; for (size_t i = 0; i < good_matches.size(); ++i)
{
// get the keypoints from the good matches
obj.push_back(keyPoints_1[ good_matches[i].queryIdx ].pt);
scene.push_back(keyPoints_2[ good_matches[i].trainIdx ].pt);
}
Mat H = findHomography( obj, scene, CV_RANSAC ); // get the corners from the image_1
std::vector<Point2f> obj_corners(4);
obj_corners[0] = cvPoint(0,0);
obj_corners[1] = cvPoint( img_1.cols, 0);
obj_corners[2] = cvPoint( img_1.cols, img_1.rows);
obj_corners[3] = cvPoint( 0, img_1.rows);
std::vector<Point2f> scene_corners(4); perspectiveTransform( obj_corners, scene_corners, H); // draw lines between the corners (the mapped object in the scene - image_2)
line( img_matches, scene_corners[0] + Point2f( img_1.cols, 0), scene_corners[1] + Point2f( img_1.cols, 0),Scalar(0,255,0));
line( img_matches, scene_corners[1] + Point2f( img_1.cols, 0), scene_corners[2] + Point2f( img_1.cols, 0),Scalar(0,255,0));
line( img_matches, scene_corners[2] + Point2f( img_1.cols, 0), scene_corners[3] + Point2f( img_1.cols, 0),Scalar(0,255,0));
line( img_matches, scene_corners[3] + Point2f( img_1.cols, 0), scene_corners[0] + Point2f( img_1.cols, 0),Scalar(0,255,0));
代码片:
- #include "opencv2/highgui/highgui.hpp"
- #include "opencv2/features2d/features2d.hpp"
- #include <iostream>
- int main( )
- {
- cv::Ptr<cv::FeatureDetector> detector = cv::FeatureDetector::create( "SIFT" );
- cv::Ptr<cv::DescriptorExtractor> extractor = cv::DescriptorExtractor::create("SIFT" );
- cv::Mat im = cv::imread("box.png", CV_LOAD_IMAGE_COLOR );
- std::vector<cv::KeyPoint> keypoints;
- cv::Mat descriptors;
- detector->detect( im, keypoints);
- extractor->compute( im,keypoints,descriptors);
- int duplicateNum = 0;
- for (int i=0;i<keypoints.size();i++)
- {
- for (int j=i+1;j<keypoints.size();j++)
- {
- float dist = abs((keypoints[i].pt.x-keypoints[j].pt.x))+abs((keypoints[i].pt.y-keypoints[j].pt.y));
- if (dist == 0)
- {
- cv::Mat descriptorDiff = descriptors.row(i)-descriptors.row(j);
- double diffNorm = cv::norm(descriptorDiff);
- std::cout<<"keypoint "<<i<<" equal to keypoint "<<j<<" descriptor distance "<<diffNorm<<std::endl;
- duplicateNum++;
- }
- }
- }
- std::cout<<"Total keypoint: "<<keypoints.size()<<", duplicateNum: "<<duplicateNum<<std::endl;
- return 1;
- }
OpenCV特征点检测------ORB特征的更多相关文章
- OpenCV特征点检测——ORB特征
ORB算法 目录(?)[+] 什么是ORB 如何解决旋转不变性 如何解决对噪声敏感的问题 关于尺度不变性 关于计算速度 关于性能 Related posts 什么是ORB 七 4 Ye ...
- Opencv 特征提取与检测-图像特征描述
图像特征描述 什么是图像特征 可以表达图像中对象的主要信息.并且以此为依据可以从其它未知图像中检测出相似或者相同对象 常见的图像特征 常见的图像特征 边缘 角点 纹理 图像特征描述 描 ...
- Opencv 特征提取与检测-Haar特征
Haar特征介绍(Haar Like Features) 高类间变异性 低类内变异性 局部强度差 不同尺度 计算效率高 这些所谓的特征不就是一堆堆带条纹的矩形么,到底是干什么用的?我这样给出 ...
- sift特征点检测和特征数据库的建立
类似于ORBSLAM中的ORB.txt数据库. https://blog.csdn.net/lingyunxianhe/article/details/79063547 ORBvoc.txt是怎么 ...
- ORB特征点检测
Oriented FAST and Rotated BRIEF www.cnblogs.com/ronny 这篇文章我们将介绍一种新的具有局部不变性的特征 -- ORB特征,从它的名字中可以看出它 ...
- OPENCV图像特征点检测与FAST检测算法
前面描述角点检测的时候说到,角点其实也是一种图像特征点,对于一张图像来说,特征点分为三种形式包括边缘,焦点和斑点,在OPENCV中,加上角点检测,总共提供了以下的图像特征点检测方法 FAST SURF ...
- python+OpenCV 特征点检测
1.Harris角点检测 Harris角点检测算法是一个极为简单的角点检测算法,该算法在1988年就被发明了,算法的主要思想是如果像素周围显示存在多于一个方向的边,我们认为该点为兴趣点.基本原理是根据 ...
- OpenCV特征点检测匹配图像-----添加包围盒
最终效果: 其实这个小功能非常有用,甚至加上只有给人感觉好像人脸检测,目标检测直接成了demo了,主要代码如下: // localize the object std::vector<Point ...
- OpenCV开发笔记(六十五):红胖子8分钟带你深入了解ORB特征点(图文并茂+浅显易懂+程序源码)
若该文为原创文章,未经允许不得转载原博主博客地址:https://blog.csdn.net/qq21497936原博主博客导航:https://blog.csdn.net/qq21497936/ar ...
随机推荐
- 自用论文排版组合 = LyX2.2.2 + TeXLive2016
注意的地方: 1.要支持中文的话选CTEX类,其他地方默认即可: 2.文档分"导言区"和"文档区",一般的编辑直接使用LyX的工具,额外的宏包在导言区添加,具体 ...
- 数字与字母混合生成流水号规则--ASP实现
最近遇到一个比较奇葩的事情,自己所负责的一个系统出现一个流水号用完的问题:正常情况下,流水号用完应该增加多位来解决这个问题.鉴于各种因素,最后决定:位数不变,增加字母进去,当数字用完后,会出现字母,而 ...
- 吐槽贴:百度地图 api 封装 的实用功能 [源码下载]
ZMap 类 功能介绍 ZMap 是学习百度地图 api 接口,开发基本功能后整的一个脚本类,本类方法功能大多使用 prototype 原型 实现: 包含的功能有:轨迹回放,圈画区域可编辑,判断几个坐 ...
- 使用node.js生成excel报表下载(excel-export express篇)
引言:日常工作中已经有许多应用功能块使用了nodejs作为web服务器,而生成报表下载也是我们在传统应用. java中提供了2套类库实现(jxl 和POI),.NET 作为微软的亲儿子更加不用说,各种 ...
- 转载:如何让spring mvc web应用启动时就执行
转载:如何让spring mvc web应用启动时就执行特定处理 http://www.cnblogs.com/yjmyzz/p/4747251.html# Spring-MVC的应用中 一.Appl ...
- gitlab使用个人版v16.11
title: gitlab使用个人版v16.11 date: 2016-11-13 20:53:00 tags: [gitlab] --- 1.安装gitbash 附上地址链接:git 2.配置git ...
- 面向对象Part1对象的创建和Static!
面向对象的特征: 1)封装 2)继承 3)多台 4)抽象 创建的是什么类型的对象 变量的声明就是什么类型. class Servant{ void xxx (){} } Servant s1 = ne ...
- 33个超级有用必须要收藏的PHP代码样例
作为一个正常的程序员,会好几种语言是十分正常的,相信大部分程序员也都会编写几句PHP程序,如果是WEB程序员,PHP一定是必备的,即使你没用开发过大型软件项目,也一定多少了解它的语法. 在PHP的流行 ...
- 【Network】OVS、VXLAN/GRE、OVN等 实现 Docker/Kubernetes 网络的多租户隔离
多租户隔离 DragonFlow与OVN | SDNLAB | 专注网络创新技术 Neutron社区每周记(6.25~7.6)| OVS将加入Linux基金会?OVN或抛弃ovsdb? | Unite ...
- 高性能MySQL(四):schema陷阱
一.schema陷阱 二.缓存表和汇总表 三.范式和反范式