OpenCV 可自动调整参数的透视变换
在shiter大牛的基础之上,对于他的程序做了一定的修改。
首先,通过两个循环使得霍夫变换两个参数:角度的分辨率和点个数的阈值可以变换,这样就不必对于每一张图像都手动的设置阈值。其次,过滤掉了两个距离很近的直线,使得能够正确找到物体的四个轮廓的直线。
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <iostream>
#include <set> #pragma comment(lib,"opencv_core2413d.lib")
#pragma comment(lib,"opencv_highgui2413d.lib")
#pragma comment(lib,"opencv_imgproc2413d.lib") cv::Point2f center(0,0); cv::Point2f computeIntersect(cv::Vec4i a, cv::Vec4i b)
{
int x1 = a[0], y1 = a[1], x2 = a[2], y2 = a[3], x3 = b[0], y3 = b[1], x4 = b[2], y4 = b[3];
float denom; if (float d = ((float)(x1 - x2) * (y3 - y4)) - ((y1 - y2) * (x3 - x4)))
{
cv::Point2f pt;
pt.x = ((x1 * y2 - y1 * x2) * (x3 - x4) - (x1 - x2) * (x3 * y4 - y3 * x4)) / d;
pt.y = ((x1 * y2 - y1 * x2) * (y3 - y4) - (y1 - y2) * (x3 * y4 - y3 * x4)) / d;
return pt;
}
else
return cv::Point2f(-1, -1);
} //确定四个点的中心线
void sortCorners(std::vector<cv::Point2f>& corners,
cv::Point2f center)
{
std::vector<cv::Point2f> top, bot; for (int i = 0; i < corners.size(); i++)
{
if (corners[i].y < center.y)
top.push_back(corners[i]);
else
bot.push_back(corners[i]);
}
corners.clear(); if (top.size() == 2 && bot.size() == 2){
cv::Point2f tl = top[0].x > top[1].x ? top[1] : top[0];
cv::Point2f tr = top[0].x > top[1].x ? top[0] : top[1];
cv::Point2f bl = bot[0].x > bot[1].x ? bot[1] : bot[0];
cv::Point2f br = bot[0].x > bot[1].x ? bot[0] : bot[1]; corners.push_back(tl);
corners.push_back(tr);
corners.push_back(br);
corners.push_back(bl);
}
} //计算直线端点的距离
bool Disserence(int a,int b)
{
if (a * a + b * b < 100)
{
return true;
}
else
{
return false;
}
} int main()
{
cv::Mat src = cv::imread("001.jpg");
if (src.empty())
return -1; cv::Mat bw;
cv::cvtColor(src, bw, CV_BGR2GRAY);
cv::blur(bw, bw, cv::Size(3, 3));
cv::Canny(bw, bw, 100, 100, 3); std::vector<cv::Vec4i> lines;
std::vector<cv::Point2f> corners;
std::vector<cv::Point2f> approx;
int HoughThre = 20;
int HoughTheta = 30;
/*
void HoughLinesP(InputArray image,OutputArray lines, double rho, double theta, int threshold, double minLineLength=0,double maxLineGap=0 )
image为输入图像,要求是8位单通道图像
lines为输出的直线向量,每条线用4个元素表示,即直线的两个端点的4个坐标值
rho和theta分别为距离和角度的分辨率
threshold为阈值,即步骤3中的阈值
minLineLength为最小直线长度,在步骤5中要用到,即如果小于该值,则不被认为是一条直线
maxLineGap为最大直线间隙,在步骤4中要用到,即如果有两条线段是在一条直线上,但它们之间因为有间隙,所以被认为是两个线段,如果这个间隙大于该值,则被认为是两条线段,否则是一条。
*/
for(;HoughTheta <= 180;HoughTheta = HoughTheta + 30)
{
HoughThre = 30; for(;HoughThre < 300;HoughThre++)
{
lines.clear();
corners.clear();
approx.clear();
cv::HoughLinesP(bw, lines, 1, CV_PI/HoughTheta, HoughThre, 30, 50); //需要不断的变更霍夫变换的参数,才可以使得刚好找到四条直线,确定出边缘 // Expand the lines
for (int i = 0; i < lines.size(); i++)
{
cv::Vec4i v = lines[i];
lines[i][0] = 0;
lines[i][1] = ((float)v[1] - v[3]) / (v[0] - v[2]) * -v[0] + v[1];
lines[i][2] = src.cols;
lines[i][3] = ((float)v[1] - v[3]) / (v[0] - v[2]) * (src.cols - v[2]) + v[3];
} //删除距离过近的两条直线
std::set<int> ErasePt;
for (int i = 0; i < lines.size(); i++)
{
for (int j = i + 1; j < lines.size(); j++)
{
if (Disserence(abs(lines[i][0] - lines[j][0]),abs(lines[i][1] - lines[j][1])) && (Disserence(abs(lines[i][2] - lines[j][2]),abs(lines[i][3] - lines[j][3]))))
{
ErasePt.insert(j);
}
}
}
// std::vector<cv::Vec4i>::iterator it = lines.end();
int Num = lines.size();
while (Num != 0)
{
std::set<int>::iterator j = ErasePt.find(Num);
if (j != ErasePt.end())
{
lines.erase(lines.begin() + Num - 1);
}
Num--;
}
if (lines.size() != 4)
{
continue;
} //计算直线的交点,保存在图像范围内的部分 for (int i = 0; i < lines.size(); i++)
{
for (int j = i+1; j < lines.size(); j++)
{
cv::Point2f pt = computeIntersect(lines[i], lines[j]);
if (pt.x >= 0 && pt.y >= 0 && pt.x <= src.cols && pt.y <= src.rows) //保证交点在图像的范围之内
corners.push_back(pt);
}
}
if (corners.size() != 4)
{
continue;
} cv::approxPolyDP(cv::Mat(corners), approx, cv::arcLength(cv::Mat(corners), true) * 0.02, true); //if (approx.size() != 4)
//{
// std::cout << "The object is not quadrilateral!" << std::endl;
// return -1;
//} if (lines.size() == 4 && corners.size() == 4 && approx.size() == 4)
{
break;
}
// std::cout<<".";
} std::cout<<std::endl<<"One Cycle";
if (lines.size() == 4 && corners.size() == 4 && approx.size() == 4)
break;
if (HoughTheta == 180 && HoughThre >= 299)
{
return -1;
}
} cv::Mat dst = src.clone();
//for (int i = 0; i < lines.size(); i++)
//{
// cv::Vec4i v = lines[i];
// cv::line(dst, cv::Point(v[0], v[1]), cv::Point(v[2], v[3]), CV_RGB(0,255,0));
//} //cvNamedWindow("image",0);
//cv::imshow("image", dst);
//cvWaitKey(); // Get mass center
for (int i = 0; i < corners.size(); i++)
center += corners[i];
center *= (1. / corners.size()); sortCorners(corners, center);
if (corners.size() == 0){
std::cout << "The corners were not sorted correctly!" << std::endl;
return -1;
} // Draw lines
for (int i = 0; i < lines.size(); i++)
{
cv::Vec4i v = lines[i];
cv::line(dst, cv::Point(v[0], v[1]), cv::Point(v[2], v[3]), CV_RGB(0,255,0));
} cvNamedWindow("image",0);
cv::imshow("image", dst); cv::waitKey();
// Draw corner points
cv::circle(dst, corners[0], 3, CV_RGB(255,0,0), 2);
cv::circle(dst, corners[1], 3, CV_RGB(0,255,0), 2);
cv::circle(dst, corners[2], 3, CV_RGB(0,0,255), 2);
cv::circle(dst, corners[3], 3, CV_RGB(255,255,255), 2); // Draw mass center
cv::circle(dst, center, 3, CV_RGB(255,255,0), 2); cv::Mat quad = cv::Mat::zeros(300, 220, CV_8UC3); std::vector<cv::Point2f> quad_pts;
quad_pts.push_back(cv::Point2f(0, 0));
quad_pts.push_back(cv::Point2f(quad.cols, 0));
quad_pts.push_back(cv::Point2f(quad.cols, quad.rows));
quad_pts.push_back(cv::Point2f(0, quad.rows)); cv::Mat transmtx = cv::getPerspectiveTransform(corners, quad_pts);
cv::warpPerspective(src, quad, transmtx, quad.size()); cv::imshow("image", dst);
cv::imshow("quadrilateral", quad);
cv::waitKey();
return 0;
}
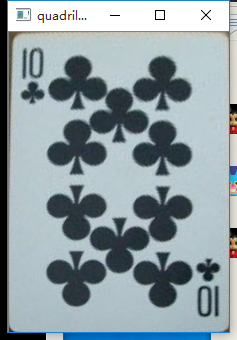
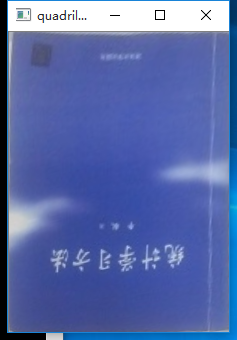
结果图: 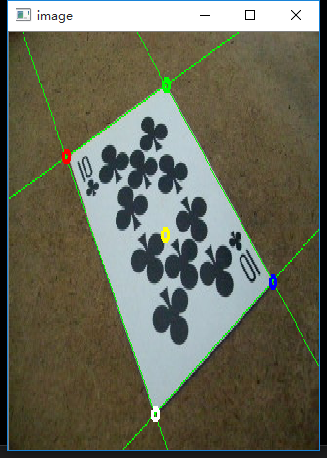
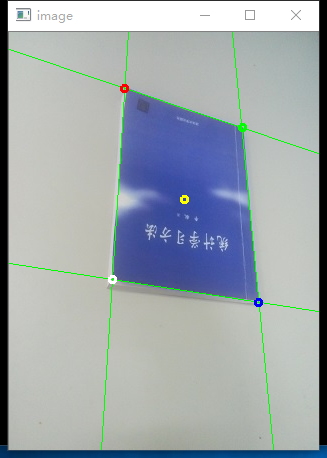
程序依然存在的问题是:对于一些测试的图片,依然无法找到物体四周的直线,也就做不了透视变换了。
OpenCV 可自动调整参数的透视变换的更多相关文章
- OpenCV 颜色空间转换参数CV_BGR2GRAY改变
OpenCV的颜色空间转换函数: C++: void cvtColor(InputArray src, OutputArray dst, int code, int dstCn=0 ) 参数d ...
- opencv IplImage各参数详细介绍以及如何从一个JPEG图像数据指针转换得到IplImage
这篇文章里介绍得最清楚了.http://blog.chinaunix.net/uid-22682903-id-1771421.html 关于颜色空间 RGB颜色空间已经非常熟悉了.HSV颜色空间需要 ...
- opencv ORB各参数的含义
ORB中有很多参数可以设置,在OpenCV中它可以通过ORB来创建一个ORB检测器. ORB::ORB(int nfeatures=500, float scaleFactor=1.2f, int n ...
- 如何在pyqt中通过OpenCV实现对窗口的透视变换
窗口的透视变换效果 当我们点击UWP应用中的小部件时,会发现小部件会朝着鼠标点击位置凹陷下去,而且不同的点击位置对应着不同的凹陷情况,看起来就好像小部件在屏幕上不只有x轴和y轴,甚至还有一个z轴.要做 ...
- 【计算机视觉】OpenCV篇(5) - 仿射变换与透视变换
参考: 图像处理的仿射变换与透视变换(https://www.imooc.com/article/27535) http://ex2tron.wang/opencv-python-extra-warp ...
- OpenCV VideoCapture.get()参数详解
转自https://blog.csdn.net/u011436429/article/details/80604590 方便查阅
- OpenCV图像变换(仿射变换与透视变换)
仿射变换(affine transform)与透视变换(perspective transform)在图像还原.图像局部变化处理方面有重要意义.通常,在2D平面中,仿射变换的应用较多,而在3D平面中, ...
- OpenCV】透视变换 Perspective Transformation(续)
载分 [OpenCV]透视变换 Perspective Transformation(续) 分类: [图像处理] [编程语言] 2014-05-27 09:39 2776人阅读 评论(13) 收藏 举 ...
- OpenCV之Python学习笔记
OpenCV之Python学习笔记 直都在用Python+OpenCV做一些算法的原型.本来想留下发布一些文章的,可是整理一下就有点无奈了,都是写零散不成系统的小片段.现在看 到一本国外的新书< ...
随机推荐
- netty系列之:手持framecodec神器,创建多路复用http2客户端
目录 简介 配置SslContext 客户端的handler 使用Http2FrameCodec Http2MultiplexHandler和Http2MultiplexCodec 使用子channe ...
- C++异常处理(try、catch、throw)
本文为转载 博主原文连接 我们通常希望自己编写的程序能够在异常的情况下也能作出相应的处理,而不至于程序莫名其妙地中断或者中止运行了.在设计程序时应充分考虑各种异常情况,并加以处理. 在C++中,一个函 ...
- Gradle入门及SpringBoot项目构建
https://blog.csdn.net/qq_27520051/article/details/90384483 一.介绍 Gradle 是一种构建工具,它抛弃了基于XML的构建脚本,取而代之的是 ...
- 【Java基础】ExecutorService的使用
ExecutorService是java中的一个异步执行的框架,通过使用ExecutorService可以方便的创建多线程执行环境. 本文将会详细的讲解ExecutorService的具体使用. 创建 ...
- 解决在进行socket通信时,一端输出流OutputStream不关闭,另一端输入流就接收不到数据
输出的数据需要达到一定的量才会向另一端输出,所以在传输数据的末端添加 \r\n 可以保证不管数据量是多少,都立刻传输到另一端.
- C# 枚举的flags 标志位应用
枚举有个特性叫标志位,使用方法如下 [Flags] enum Foo { a =1, b = 2, c = 4, d = 8 } 每个值需要为2的n次方,保证多个值的组合不会重复. 这样在判断其中一个 ...
- 30个类手写Spring核心原理之AOP代码织入(5)
本文节选自<Spring 5核心原理> 前面我们已经完成了Spring IoC.DI.MVC三大核心模块的功能,并保证了功能可用.接下来要完成Spring的另一个核心模块-AOP,这也是最 ...
- gogs报错解决合集
目录 一.在组织中添加成员,一直显示普通用户 一.在组织中添加成员,一直显示普通用户 组织是公司,团队是公司中的不同队伍.例如A团队设置为加入就有管理员权限,那加入就有管理员. 但在组织成员那一栏中加 ...
- 2020KCTF秋季赛签到题
比赛平台:https://ctf.pediy.com/game-season_fight-158.htm 开场 签到题 例行检查,64位程序,无壳 试运行一下,看看大概的情况 64位ida载入,根据运 ...
- Python利用ctypes实现C库函数调用
0X00 ctypes 是强大的,使用它我们就能够调 用动态链接库中函数,同时创建各种复杂的 C 数据类型和底层操作函数.使得python也具备了底层内存操作的能力,再配合python本身强大的表达能 ...