目标检测——IoU 计算
Iou 的计算
我们先考虑一维的情况:令 \(A = [x_1,x_2], B = [y_1, y_2]\),若想要 \(A\) 与 \(B\) 有交集,需要满足如下情况:
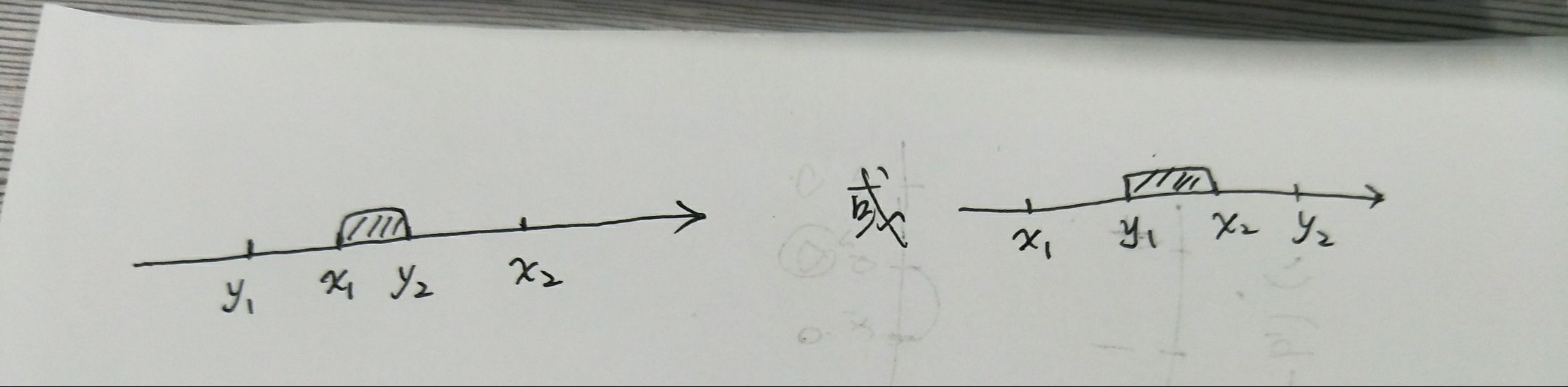
简言之,要保证 \(A\) 和 \(B\) 的最大值中最小的那个减去它们中的最小值中最大的那个即可获得公共部分,代码实现如下:
class Anchor:
def __init__(self, base_size=16):
self.base_size = base_size # 滑动窗口的大小
if not base_size:
raise ValueError("Invalid base_size: {}.".format(base_size))
self._anchor = np.array([1, 1, self.base_size, self.base_size]) - 1
@property
def anchor(self):
return self._anchor
@anchor.setter
def anchor(self, new_anchor):
self._anchor = new_anchor
@property
def w(self):
'''
锚框的宽度
'''
return self.anchor[2] - self.anchor[0] + 1
@property
def h(self):
'''
锚框的高度
'''
return self.anchor[3] - self.anchor[1] + 1
@property
def size(self):
'''
锚框的面积
'''
return self.w * self.h
@property
def _whctrs(self):
"""
Return x center, and y center for an anchor (window). 锚框的中心坐标
"""
x_ctr = self.anchor[0] + 0.5 * (self.w - 1)
y_ctr = self.anchor[1] + 0.5 * (self.h - 1)
return np.array([x_ctr, y_ctr])
@staticmethod
def _coordinate(aspect, ctr):
'''
依据宽高组合计算锚框的坐标
'''
k = (aspect - 1) / 2
return np.concatenate([ctr - k, ctr + k], axis=1)
先创建一个可以用来做运算的计算器,然后在此基础上计算二维的 IoU,即
def iou(anchor, anchor1):
A = Anchor()
B = Anchor()
A.anchor = anchor
B.anchor = anchor1
T = np.stack([A.anchor, B.anchor])
xmin, ymin, xmax, ymax = np.split(T, 4, axis=1)
w = xmax.min() - xmin.max()
h = ymax.min() - ymin.max()
I = w * h
U = A.size + B.size - I
return I / U
下面举一例子,并可视化:
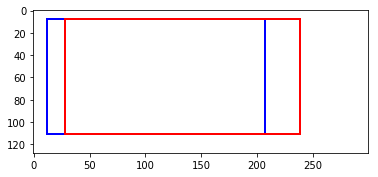
img = np.ones((128 ,300, 3)) # 图片
anchor = [ 12., 8., 195., 103.]
anchor1 = [ 28., 8., 211., 103.]
iou(anchor, anchor1)
最终结果为:
0.8151364126804707
目标检测——IoU 计算的更多相关文章
- 目标检测 IOU(交并比) 理解笔记
交并比(Intersection-over-Union,IoU): 目标检测中使用的一个概念 是产生的候选框(candidate bound)与原标记框(ground truth bound)的交叠率 ...
- CVPR2019目标检测论文看点:并域上的广义交
CVPR2019目标检测论文看点:并域上的广义交 Generalized Intersection over Union Generalized Intersection over Union: A ...
- 目标检测中常提到的IoU和mAP究竟是什么?
看完这篇就懂了. IoU intersect over union,中文:交并比.指目标预测框和真实框的交集和并集的比例. mAP mean average precision.是指每个类别的平均查准 ...
- 评价目标检测(object detection)模型的参数:IOU,AP,mAP
首先我们为什么要使用这些呢? 举个简单的例子,假设我们图像里面只有1个目标,但是定位出来10个框,1个正确的,9个错误的,那么你要按(识别出来的正确的目标/总的正确目标)来算,正确率100%,但是其实 ...
- 目标检测评价标准(mAP, 精准度(Precision), 召回率(Recall), 准确率(Accuracy),交除并(IoU))
1. TP , FP , TN , FN定义 TP(True Positive)是正样本预测为正样本的数量,即与Ground truth区域的IoU>=threshold的预测框 FP(Fals ...
- AAAI 2020 | DIoU和CIoU:IoU在目标检测中的正确打开方式
论文提出了IoU-based的DIoU loss和CIoU loss,以及建议使用DIoU-NMS替换经典的NMS方法,充分地利用IoU的特性进行优化.并且方法能够简单地迁移到现有的算法中带来性能的提 ...
- ECCV 2018 目标检测 | IoU-Net:将IoU的作用发挥到极致
常见的目标检测算法缺少了定位效果的学习,IoU-Net提出IoU predictor.IoU-guided NMS和Optimization-based bounding box refinement ...
- 目标检测中的IOU和CIOU原理讲解以及应用(附测试代码)
上期讲解了目标检测中的三种数据增强的方法,这期我们讲讲目标检测中用来评估对象检测算法的IOU和CIOU的原理应用以及代码实现. 交并比IOU(Intersection over union) 在目标检 ...
- 目标检测性能评价——关于mAP计算的思考
1. 基本要求 从直观理解,一个目标检测网络性能好,主要有以下表现: 把画面中的目标都检测到--漏检少 背景不被检测为目标--误检少 目标类别符合实际--分类准 目标框与物体的边缘贴合度高-- 定位准 ...
随机推荐
- WPS 表格筛选两列相同数据-完美-2017年11月1日更新
应用: 1.选出A列中的数据是否在B列中出现过: 2.筛选出某一批序号在一个表格里面的位置(整批找出) 3.其实还有其他很多应用,难描述出来... ... A列中有几百的名字,本人想帅选出B列中的名字 ...
- Android的网络通信机制
1. Socket接口 不常用 2.HttpURLConnection接口 3. HttpClient接口 http://blog.csdn.net/ccc20134/article/details/ ...
- linux笔记_day04
1.cat 连接并显示 -n 显示行号 -E END 显示行尾 2.tac 从后往前显示 3.ctrl +C 4.more 向后翻 到最后会退出 5.less 翻到最后不退出 常用 支持b k sp ...
- dataTable插件锁表头和锁列的教程
源代码下载 我的同事让我帮忙给弄个锁头锁列的插件.结果找到大名鼎鼎的jquery dataTable插件. 今天我们来介绍不常用的功能:dataTable插件锁表头和锁前两列 由于是移动前端.我们不考 ...
- CSS3动画常用demo
1.border动画 2.闪动动画(一闪一闪亮晶晶,满天都是小星星) .blink { animation: mymove 0.8s infinite; -webkit-animation: mymo ...
- AT91RM9200---定时器简介
1.前言 系统定时器模块集成了3个不同的定时器 一个周期性间隔的定时器,用来为操作系统设置时基 一个看门狗定时器,可用于软件死锁时进行系统复位 一个实时时钟计数器用来记录流逝的时间 系统定时器时钟 这 ...
- 3D中的OBJ文件格式详解
常见到的*.obj文件有两种:第一种是基于COFF(Common Object File Format)格式的OBJ文件(也称目标文件),这种格式用于编译应用程序:第二种是Alias|Wavefron ...
- 【转】C/C++内存泄漏及检测
“该死系统存在内存泄漏问题”,项目中由于各方面因素,总是有人抱怨存在内存泄漏,系统长时间运行之后,可用内存越来越少,甚至导致了某些服务失败.内存泄漏是最难发现的常见错误之一,因为除非用完内存或调用ma ...
- javascript 练习题目答案1
以下是这个教程的答案 https://www.liaoxuefeng.com/wiki/001434446689867b27157e896e74d51a89c25cc8b43bdb3000/00143 ...
- 在Vue中使用计时器笔记
在Vue中使用了计时器,一定要记得在生命周期destroyed()里清掉,不然第二次进入这个组件,会出现很大的问题 destroyed () { // (很重要)当跳转到其他页面的时候,要在生命周期的 ...