基于IAR平台FreeRTOS移植
开始这篇文章之前先简单说明一下,我使用的MCU是我们公司自主研发的ACH1180芯片,和STM32差不多,都是Cortex-M4的核,所以移植的过程参考了STM32移植的步骤。
1.解压FreeRTOSV8.2.3到本地目录(FreeRTOS的源码在官网上有,目前是9.0.0版本,据说8版本稳定,但未做考证)
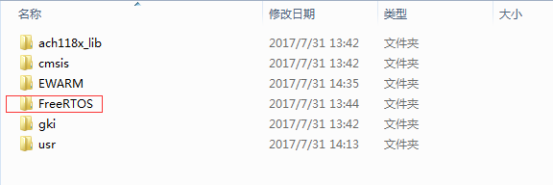
2.将\FreeRTOSV8.2.3\FreeRTOS\中的Source文件夹复制到待移植的代码工程中,并且重新命名为“FreeRTOS”
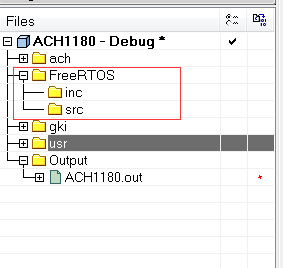
3.在IAR中建立FreeRTOS的文件域,FreeRTOS文件域下建立src和inc.
4.添加FreeRTOS文件:
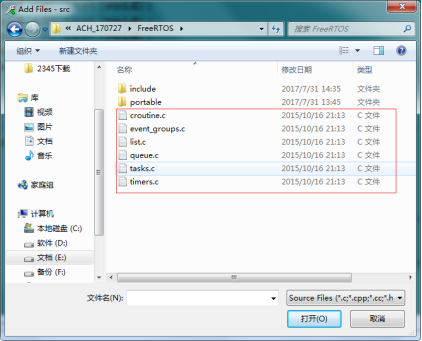
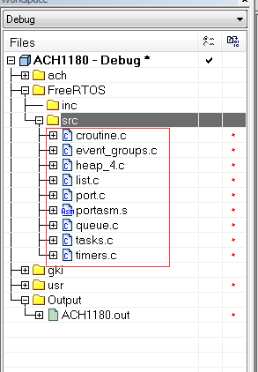
I)在src文件域下,添加FreeRTOS文件夹中源文件
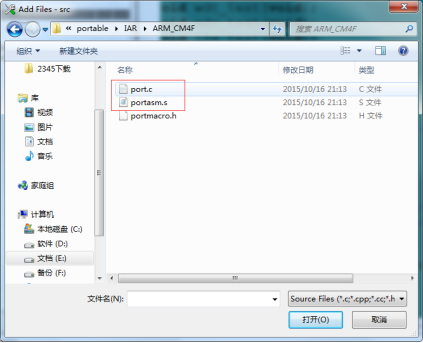
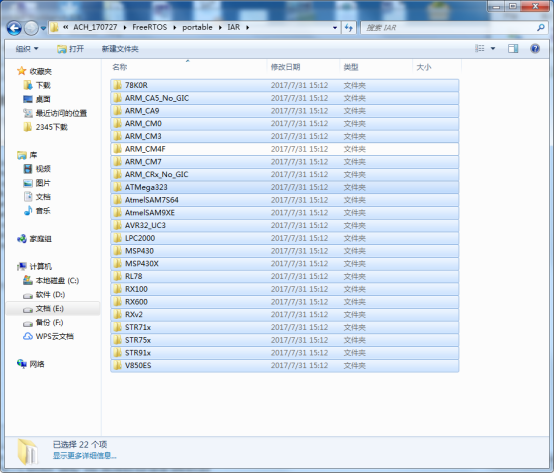
II)在src文件域下,添加\FreeRTOS\portable\IAR\ARM_CM4F中源文件
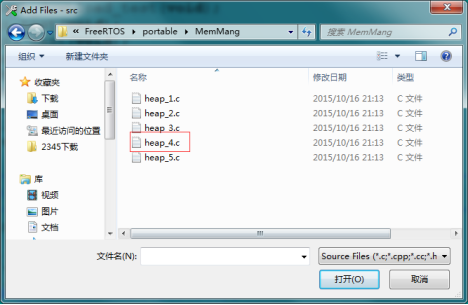
III)在src文件域下,添加FreeRTOS/portable/MemMang下的源文件
完成效果图:
5.制作FreeRTOSConfig.h文件
由于ACH的核和STM32F4XX系列的核都是ARM CM4F的核,所以可以参考STM32F4XX的FreeRTOSConfig.h的文档.
把源码中,FreeRTOSV8.2.3\FreeRTOS\Demo\CORTEX_M4F_STM32F407ZG-SK中的FreeRTOSConfig.h复制到 待移植的工程目录中:ACH_170727\FreeRTOS\include
将FreeRTOSConfig.h添加到IAR工程中,FreeRTOS inc文件域下。(这步仅仅为了编辑代码方便)
将待修改FreeRTOSConfig信息:
#define configUSE_IDLE_HOOK 1
#define configUSE_TICK_HOOK 1
#define configCHECK_FOR_STACK_OVERFLOW 2
#define configUSE_MALLOC_FAILED_HOOK 1
修改为:
#define configUSE_IDLE_HOOK 0
#define configUSE_TICK_HOOK 0
#define configCHECK_FOR_STACK_OVERFLOW 0
#define configUSE_MALLOC_FAILED_HOOK 0
以下为ACH订制修改方案:
将:#define configMAX_PRIORITIES ( 5 )
#define configTOTAL_HEAP_SIZE ( size_t ) ( 75 * 1024 ) )
修改为:
#define configMAX_PRIORITIES (12)
#define configTOTAL_HEAP_SIZE ( ( size_t ) ( 50 * 1024 ) ))
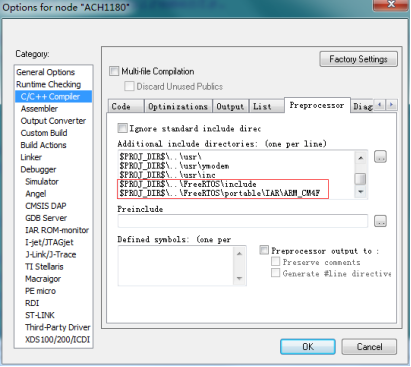
6.添加编译路径
I)添加C文件编译路径
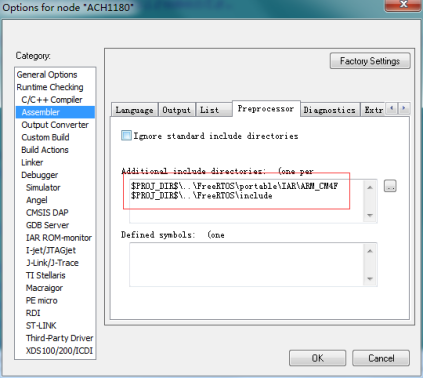
II)添加汇编文件编译路径
完成以上步骤,可以编译了,若编译没有错误,表示FreeRTOSconfig文件修改正确。
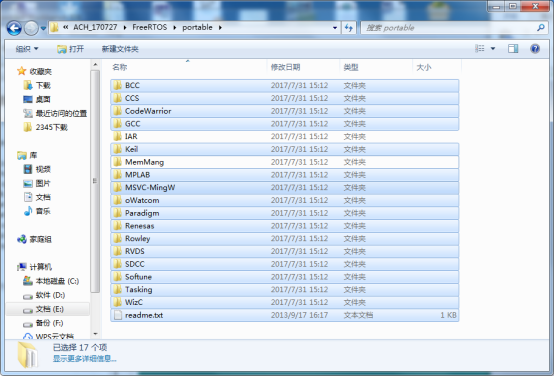
7.删除FreeRTOS中多余的库文件。
在\ACH_170727\FreeRTOS\portable\文件夹中,除了IAR 和MemMang保留,其他文件夹删除。
在\ACH_170727\FreeRTOS\portable\IAR文件夹中,除了ARM_CM4F保留,其他文件夹删除。
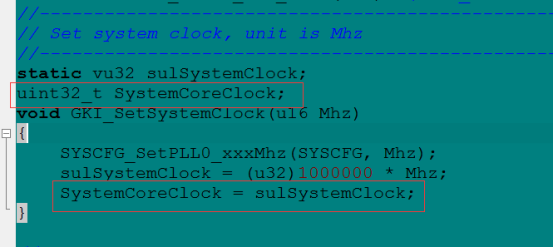
8.引入系统时钟
在GKI_SetSystemCoreClock函数中,把sulSystemClcok变量复制给SystemCoreClcok
9.编写测试代码。
测试代码如下:
/* Scheduler includes. */
#include <stdio.h>
#include "FreeRTOS.h"
#include "task.h"
#include "queue.h"
#include "semphr.h"
#define TASK1_PRIORITY 2
#define TASK2_PRIORITY 3
#define TASK3_PRIORITY 4
void vTask1( void *pvParameters );
void vTask2( void *pvParameters );
void vTask3( void *pvParameters );
void FreeRTOS_test(void)
{
printf("portTICK_PERIOD_MS = %d\r\n", portTICK_PERIOD_MS);
xTaskCreate( vTask1, "Task1", 512, NULL, TASK1_PRIORITY, NULL );
xTaskCreate( vTask2, "Task2", 512, NULL, TASK2_PRIORITY, NULL );
xTaskCreate( vTask3, "Task3", 512, NULL, TASK3_PRIORITY, NULL );
vTaskStartScheduler();
GKI_Printf("FreeRTOS Failed\r\n");
}
void vTask1(void *pvParameters)
{
while (1) {
vTaskDelay(1000 / portTICK_PERIOD_MS);
GKI_Printf("vTask1\r\n");
}
}
void vTask2(void *pvParameters)
{
while (1) {
vTaskDelay(2000 / portTICK_PERIOD_MS);
GKI_Printf("vTask2\r\n");
}
}
void vTask3(void *pvParameters)
{
while (1) {
vTaskDelay(3000 / portTICK_PERIOD_MS);
GKI_Printf("vTask3\r\n");
}
}
在Uart0端可以看到vTask1 vTask2 vTask3 在指定的时间片上打印,表示FreeRTOS移植成功。
基于IAR平台FreeRTOS移植的更多相关文章
- nRF52832 SDK15.3.0 基于ble_app_uart demo FreeRTOS移植
参考资料:https://blog.csdn.net/u010860832/article/details/86235993 这里把移植经验记录下来,供有需要的同学参考,有不对的地方也请大家批评指正. ...
- 在IAR平台建立STC8ASK64S4A12单片机工程
转载:http://www.51hei.com/bbs/forum.php?mod=viewthread&tid=168481&page=1#pid737250 一般我们使用STC单 ...
- 基于335X平台的UBOOT中交换芯片驱动移植
基于335X平台的UBOOT中交换芯片驱动移植 一.软硬件平台资料 1.开发板:创龙AM3359核心板,网口采用RMII形式. 2.UBOOT版本:U-Boot-2016.05,采用FDT和DM. 3 ...
- 基于IAR和STM32的uCOS-II移植
网上基于MDK的移植数不胜数,但是基于IAR的移植几乎没有,因为官方的例程就是基于IAR的,所以移植起来很简单,没人介绍,但还是得小心谨慎,一不小心就出错,对于新手来说,查找错误可不是那么容易的.IA ...
- 基于Linux平台的libpcap源码分析和优化
目录 1..... libpcap简介... 1 2..... libpcap捕包过程... 2 2.1 数据包基本捕包流程... 2 2.2 libpcap捕包过程... ...
- 一个基于.NET平台的自动化/压力测试系统设计简述
AutoTest系统设计概述 AutoTest是一个基于.NET平台实现的自动化/压力测试的系统,可独立运行于windows平台下,支持分布式部署,不需要其他配置或编译器的支持.(本质是一个基于协议的 ...
- 基于Zynq平台的EtherCAT主站方案实现
作者:陈秋苑 谢晓锋 陈海焕 广州虹科电子科技有限公司 摘 要:EtherCAT 是开放的实时以太网通讯协议,由德国倍福自动化有限公司研发.EtherCAT 具有高性能.低成本.容易使用等特点,目前在 ...
- 基于STM32的uCGUI移植和优化
基于STM32的uCGUI移植和优化 首先在开始这个说明之前,要简要说明下具体的环境: 编译工具:MDK4.20 开发板:安富莱v2版开发板 调试器:JLink v8盗版 移植篇 相信大家有移植经验 ...
- 基于Linux的kfifo移植到STM32(支持os的互斥访问)
基于Linux的kfifo移植到STM32(支持os的互斥访问) 关于kfifo kfifo是内核里面的一个First In First Out数据结构,它采用环形循环队列的数据结构来实现:它提供一个 ...
随机推荐
- tomcat配置接口访问时间
这次刚好用到,亲测可用.参照:https://www.cnblogs.com/wuxun1997/p/9068398.html 项目中有些页面时延不稳定,需要看每次接口调用时延,怎么看,有两种方法:一 ...
- QQ群成员发言次数统计(词云制作)
所用数据来自于之前的一篇博客: <QQ群成员发言次数统计(正则表达式版)> 链接:http://www.cnblogs.com/liyongzhao/p/3324026.html 1.首先 ...
- debian 安装libreoffice6.1 转换pdf
这个东西能转,但效率不高,我已经用专门的服务器docker,速度很快,直接用curl就能返回 但这里还是记录一下直接用命令调用吧,毕竟有的老的地方这么用 && cd /usr/loca ...
- Azure CosmosDB (6) 冲突类型和解决策略
<Windows Azure Platform 系列文章目录> 当我们为CosmosDB配置多个Azure Region写入,就需要考虑冲突类型和解决策略. 对于配置了多个写入区域的 Az ...
- 分布式job-任务调度(一)
什么是任务调度: 任务调度:在单位时间内,去调用某个方法或者执行某段代码 java实现方式: 方法一(使用线程实现): public static void ThreadTskScheduling() ...
- rediscluster安装
Redis 3.2.1集群搭建 一.概述 Redis3.0版本之后支持Cluster. 1.1.redis cluster的现状 目前redis支持的cluster特性: 1):节点自动发现 2) ...
- linux下批量查找UTF-8的BOM文件,并去除BOM
首先查找看看有哪些文件包含BOM find . -type f -print0 | xargs -0r awk '/^\xEF\xBB\xBF/ {print FILENAME} {nextfile} ...
- Nginx 流量和连接数限制
1.Nginx流量限制 实现流量限制由两个指令 limit_rate 和 limit_rate_after 共同完成: limit_rate 语法:limit_rate rate; 默认值:limit ...
- docker 恶意镜像到容器逃逸影响本机
转载:http://521.li/post/122.html SUSE Linux GmbH高级软件工程师Aleksa Sarai公布了影响Docker, containerd, Podman, CR ...
- Redis简单入门
什么是Reids 就是一个数据库,将数据保存在内存中 优点 支持数据持久化 支持丰富的数据类型 (字符串,哈希,列表,集合) 和Me的区别:Me是简单版的Redis,Me不支持持久化.Me仅仅支持字符 ...