Genesis 多边形闭轮廓填充算法
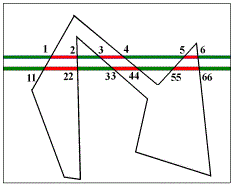
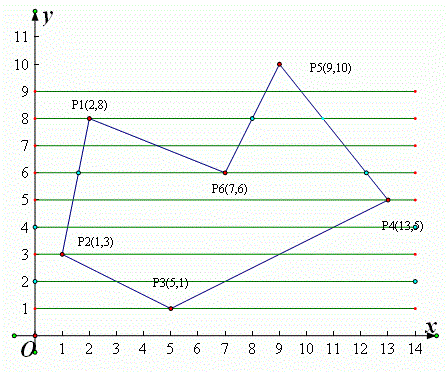
通过逐行扫描,计算得出直线与多边形相交点进行求解
原理图形如下所示:
相关函数:
/// <summary>
/// 求点P到线段L距离
/// </summary>
/// <param name="p"></param>
/// <param name="l"></param>
/// <param name="return_p"></param>
/// <param name="is_calc_width"></param>
/// <returns></returns>
public double p2l_di(gP p, gL l, gPoint return_p, bool is_calc_width = false)
{
double b, s, a_side, b_side, c_side;
a_side = p2p_di(p.p, l.ps);
if (a_side < eps) return ;
b_side = p2p_di(p.p, l.pe);
if (b_side < eps) return ;
c_side = p2p_di(l.ps, l.pe);
if (b_side < eps) return a_side; //' 钝角或直角三角形
if (a_side * a_side >= b_side * b_side + c_side * c_side)
{
return_p = l.pe;
if (is_calc_width)
return b_side - p.width * 0.0005 - l.width * 0.0005;
else
return b_side;
} if (b_side * b_side >= a_side * a_side + c_side * c_side)
{
return_p = l.ps;
if (is_calc_width)
return a_side - p.width * 0.0005 - l.width * 0.0005;
else
return a_side;
} // 锐角三角形
return_p = p2l_toP(p.p, l);
b = (a_side + b_side + c_side) * 0.5;
s = Math.Sqrt(b * (b - a_side) * (b - b_side) * (b - c_side));
if (is_calc_width)
return s * / c_side - p.width * 0.0005 - l.width * 0.0005;
else
return s * / c_side;
}
/// <summary>
/// 求点P到线L垂足P
/// </summary>
/// <param name="p"></param>
/// <param name="l"></param>
/// <returns></returns>
public gPoint p2l_toP(gPoint p, gL l)
{
gPoint tempP;
if (Math.Abs(l.ps.x - l.pe.x) < eps)//垂直
{
tempP.x = (l.ps.x + l.pe.x) * 0.5;
tempP.y = p.y;
}
else if (Math.Abs(l.ps.y - l.pe.y) < eps) //水平
{
tempP.x = p.x;
tempP.y = (l.ps.y + l.pe.y) * 0.5;
}
else
{
double k = (l.pe.y - l.ps.y) / (l.pe.x - l.ps.x);
tempP.x = (p.y - l.ps.y + k * l.ps.x + p.x * k) * (k + * k);
tempP.y = p.y - (tempP.x - p.x) / k;
}
return tempP;
}
/// <summary>
/// 求线段与线段交点
/// </summary>
/// <param name="l1ps"></param>
/// <param name="l1pe"></param>
/// <param name="l2ps"></param>
/// <param name="l2pe"></param>
/// <param name="isIntersect"></param>
/// <returns></returns>
public gPoint l2l_Intersect(gPoint l1ps, gPoint l1pe, gPoint l2ps, gPoint l2pe, ref bool isIntersect)
{
gL L1 = new gL(l1ps, l1pe, );
gL L2 = new gL(l2ps, l2pe, );
gPoint tempP = new gPoint();
double ABC, ABD, CDA, CDB, T;
//面积符号相同则两点在线段同侧,不相交 (对点在线段上的情况,本例当作不相交处理)
ABC = (L1.ps.x - L2.ps.x) * (L1.pe.y - L2.ps.y) - (L1.ps.y - L2.ps.y) * (L1.pe.x - L2.ps.x);
ABD = (L1.ps.x - L2.pe.x) * (L1.pe.y - L2.pe.y) - (L1.ps.y - L2.pe.y) * (L1.pe.x - L2.pe.x);
CDA = (L2.ps.x - L1.ps.x) * (L2.pe.y - L1.ps.y) - (L2.ps.y - L1.ps.y) * (L2.pe.x - L1.ps.x); // 三角形cda 面积的2倍 // 注意: 这里有一个小优化.不需要再用公式计算面积,而是通过已知的三个面积加减得出.
CDB = CDA + ABC - ABD; // 三角形cdb 面积的2倍
isIntersect = (CDA * CDB <= ) && (ABC * ABD <= );
//计算交点
T = CDA / (ABD - ABC);
tempP.x = L1.ps.x + T * (L1.pe.x - L1.ps.x);
tempP.y = L1.ps.y + T * (L1.pe.y - L1.ps.y);
return tempP;
}
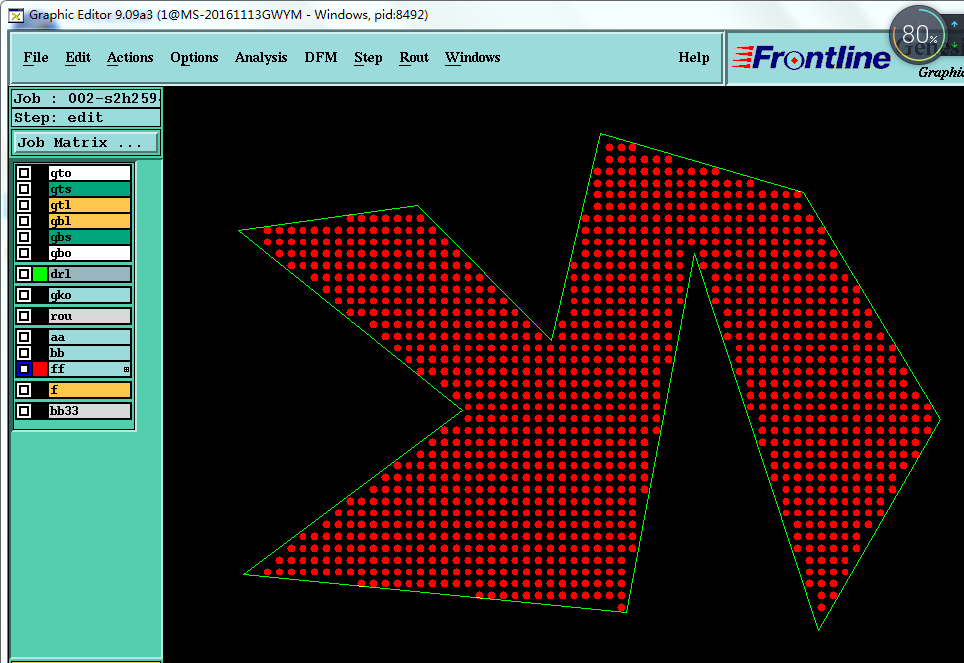
Genesis实现后图示:
相关链接:http://www.cnblogs.com/zjutlitao/p/4117223.html
Genesis 多边形闭轮廓填充算法的更多相关文章
- OpenCV探索之路(十一):轮廓查找和多边形包围轮廓
Canny一类的边缘检测算法可以根据像素之间的差异,检测出轮廓边界的像素,但它没有将轮廓作为一个整体.所以要将轮廓提起出来,就必须将这些边缘像素组装成轮廓. OpenCV中有一个很强大的函数,它可以从 ...
- OpenCV计算机视觉学习(8)——图像轮廓处理(轮廓绘制,轮廓检索,轮廓填充,轮廓近似)
如果需要处理的原图及代码,请移步小编的GitHub地址 传送门:请点击我 如果点击有误:https://github.com/LeBron-Jian/ComputerVisionPractice 1, ...
- OpenCV空洞填充算法
讨论帖: http://bbs.csdn.net/topics/391542633 在Matlab下,使用imfill可以很容易的完成孔洞填充操作,感觉这是一个极为常用的方法,然而不知道为什么Op ...
- CGA填充算法之种子填充算法
CGA填充算法之种子填充算法 平面区域填充算法是计算机图形学领域的一个很重要的算法,区域填充即给出一个区域的边界 (也可以是没有边界,只是给出指定颜色),要求将边界范围内的所有象素单元都修改成指定的颜 ...
- JAVA实现种子填充算法
种子填充算法原理在网上很多地方都能找到,这篇是继上篇扫描线算法后另一种填充算法,直接上实现代码啦0.0 我的实现只是实现了种子填充算法,但是运行效率不快,如果大佬有改进方法,欢迎和我交流,谢谢! 最后 ...
- 种子填充算法描述及C++代码实现
项目需要看了种子填充算法,改进了算法主要去除面积小的部分.种子填充算法分为两种,简单的和基于扫描线的方法,简单的算法如下描述(笔者针对的是二值图像): (1)从上到下,从左到有,依次扫描每个像素: ( ...
- 图像处理之泛洪填充算法(Flood Fill Algorithm)
泛洪填充算法(Flood Fill Algorithm) 泛洪填充算法又称洪水填充算法是在很多图形绘制软件中常用的填充算法,最熟悉不过就是 windows paint的油漆桶功能.算法的原理很简单,就 ...
- 漫水填充算法 - cvFloodFill() 实现
前言 漫水填充算法是用来标记一片区域的:设置一个种子点,然后种子点附近的相似点都被填充同一种颜色. 该算法应用性很广,比如目标识别,photoshop 的魔术棒功能等等,是填充类算法中应用最为广泛的一 ...
- Open gl 的不规则图形的4联通种子递归填充和扫描线种子递归填充算法实现
实验题目:不规则区域的填充算法 实验目的:验证不规则区域的填充算法 实验内容:利用VC与OpenGL,实现不规则区域的填充算法. 1.必做:实现简单递归的不规则区域填充算法. 2.选做:针对简单递归算 ...
随机推荐
- gtest ASSERT_TRUE和EXPECT_TRUE
调用ASSERT_TRUE的函数,返回值类型定义必须是void,如果想返回别的类型,就用EXPECT_TRUE: void abc::fun() { ASSERT_TRUE(fun1()); } bo ...
- day07补充-数据类型总结及拷贝
目录 数据类型总结 按照存一个值 OR 多个值来分 按照有序 OR 无序来分 按照可变 OR 不可变来分 拷贝 && 浅拷贝 && 深拷贝&& .cop ...
- cocos creator destroy方法
node.destroy(),Node.destroyAllChildren并不会立即销毁,实际销毁操作会延迟到当前帧渲染前执行. 这段话可能不明白,但是在Node.destroyAllChildre ...
- spring IOC bean间关系
1.0 继承关系 实体 package com.java.test5; import java.util.*; /** * @author nidegui * @create 2019-06-22 1 ...
- centOS Linux下用yum安装mysql
centOS Linux下用yum安装mysql 第一篇:安装和配置MySQL 第一步:安装MySQL [root@192 local]# yum -y install mysql- ...
- SpringMVC知识点总结一(非注解方式的处理器与映射器配置方法)
一.SpringMVC处理请求原理图(参见以前博客) 1. 用户发送请求至前端控制器DispatcherServlet 2. DispatcherServlet收到请求调用HandlerMappi ...
- EF入门
1.(安装EF)右键项目
- cuda_device_functions.h:32:31: fatal error: cuda/include/cuda.h: 没有那个文件或目录
问题在复现工程https://github.com/google/hdrnet时遇到. 现象: 解决办法: 修改hdrnet文件夹下的Makefile文件:在在nvcc里面添加路径:-I /usr/l ...
- bootstrapValidator代码中开启验证和判断验证是否通过
//开启验证 $('#saveadmin_form').data('bootstrapValidator').validate(); //是否通过校验 if(!$('#saveadmin_form') ...
- CF997A Convert to Ones
CF997A Convert to Ones 题目大意: 给你一个长度为 nn 的01串( n $\leq 3*10^5$ ),你有两种操作: 1.将一个子串翻转,花费 XX 2.将一个子串中的0变成 ...