ROS-Rviz-turtlebot3仿真信息查看
前言:Rviz是ROS自带的一种3D可视化工具。
一、安装turtlebot3功能包
1.1 安装依赖包
sudo apt-get install ros-kinetic-joy ros-kinetic-teleop-twist-joy ros-kinetic-teleop-twist-keyboard ros-kinetic-laser-proc ros-kinetic-rgbd-launch ros-kinetic-depthimage-to-laserscan ros-kinetic-rosserial-arduino ros-kinetic-rosserial-python ros-kinetic-rosserial-server ros-kinetic-rosserial-client ros-kinetic-rosserial-msgs ros-kinetic-amcl ros-kinetic-map-server ros-kinetic-move-base ros-kinetic-urdf ros-kinetic-xacro ros-kinetic-compressed-image-transport ros-kinetic-rqt-image-view ros-kinetic-gmapping ros-kinetic-navigation
1.2 安装功能包
cd ~/catkin_ws/src/ git clone https://github.com/ROBOTIS-GIT/turtlebot3.git git clone https://github.com/ROBOTIS-GIT/turtlebot3_msgs.git git clone https://github.com/ROBOTIS-GIT/turtlebot3_simulations.git cd ~/catkin_ws && catkin_make
二、仿真并查看
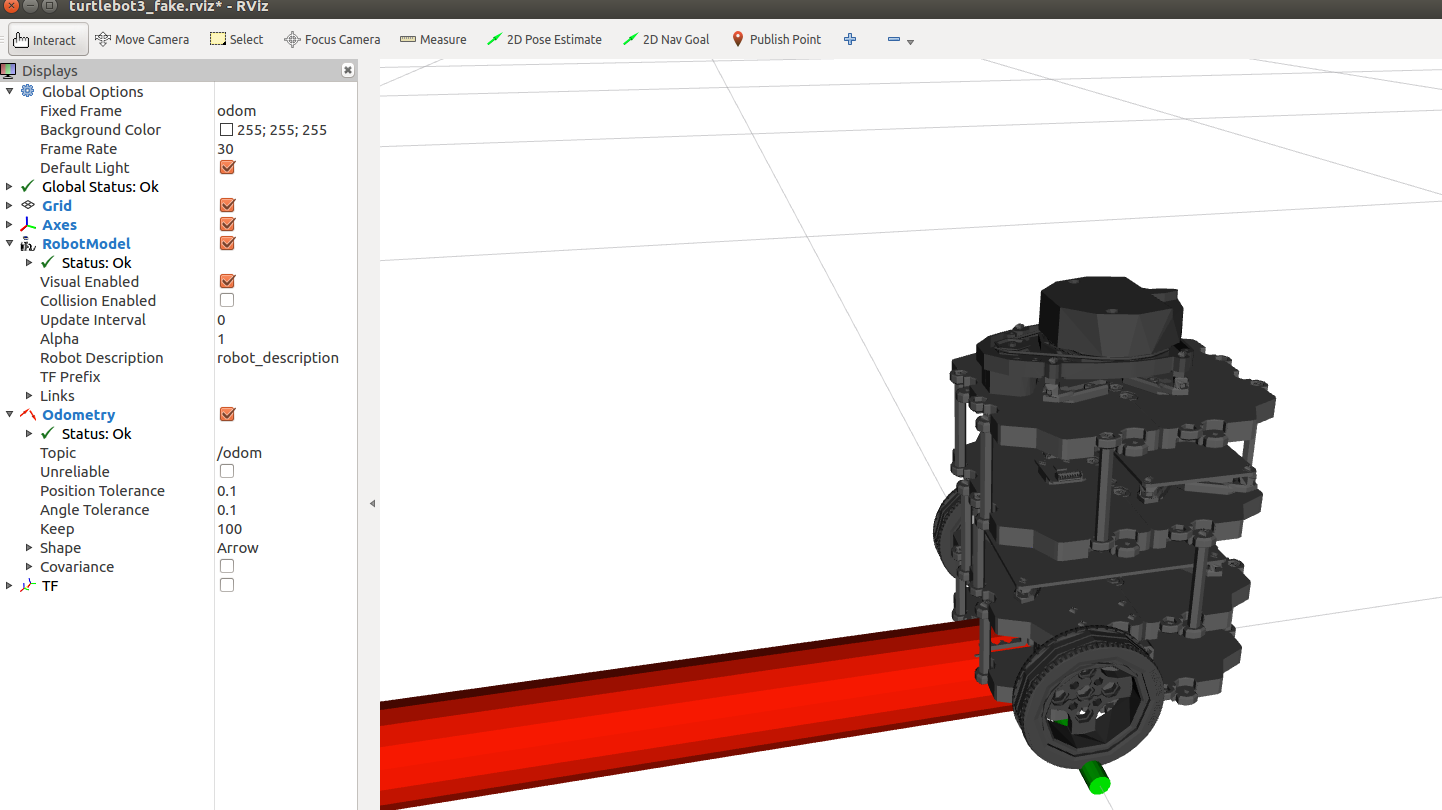
2.1 加载三维模型
cd /home/cdq/catkin_ws/src/turtlebot3_simulations/turtlebot3_fake/launch
export TURTLEBOT3_MODEL=burgerroslaunch turtlebot3_fake.launch
----------------------------------------
解析:
第二条是设置环境变量。
第三条运行了tur tlebot3_fake_node节点(三维模型)和robot_state_publisher节点(发布车轮信息)。
显示如下:
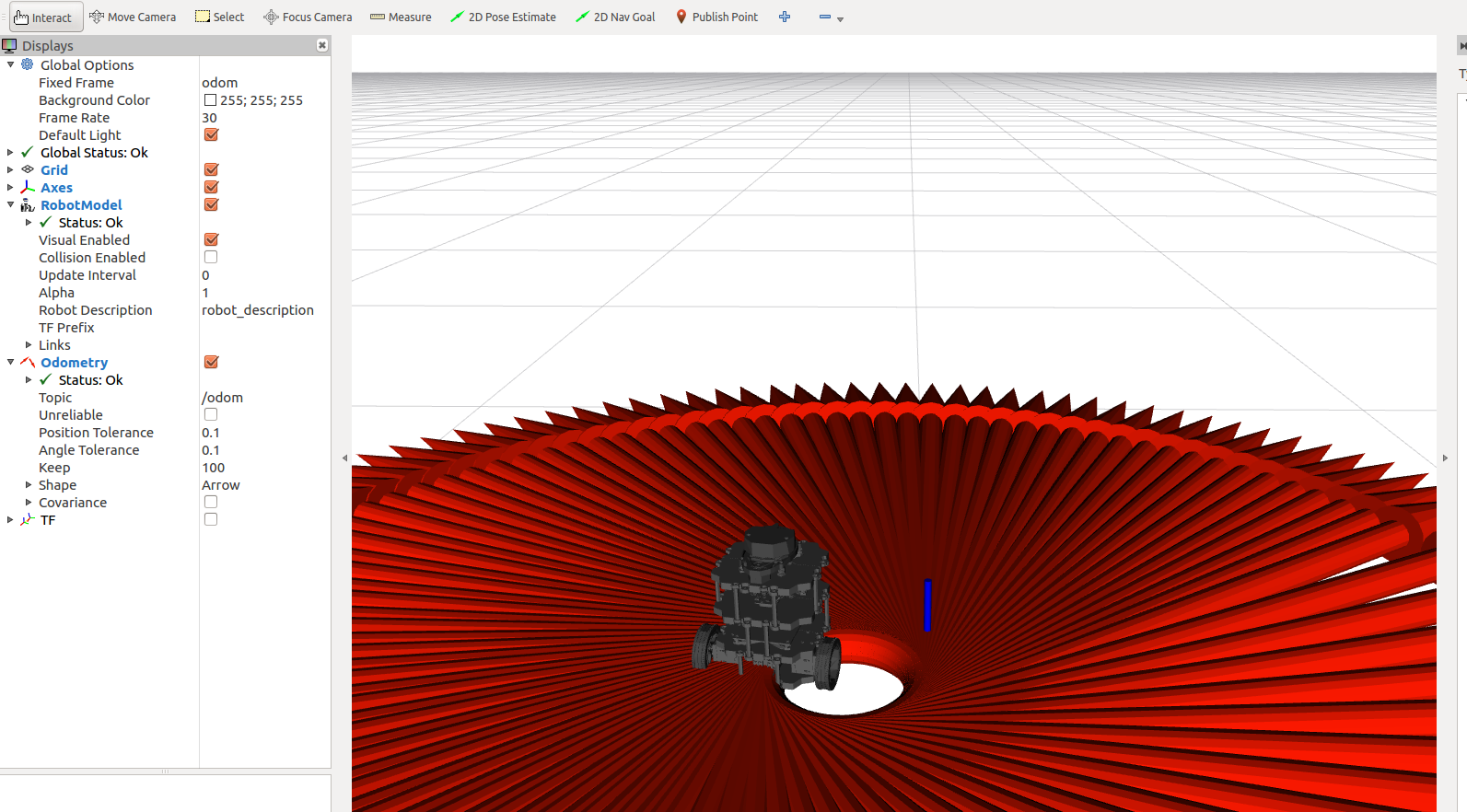
2.2 开启控制命令
启用命令后可以用wasd控制方向。
cd ~/catkin_ws/src/turtlebot3/turtlebot3_teleop/launch export TURTLEBOT3_MODEL=burger roslaunch turtlebot3_teleop_key.launch
----------------------------------
命令解析:
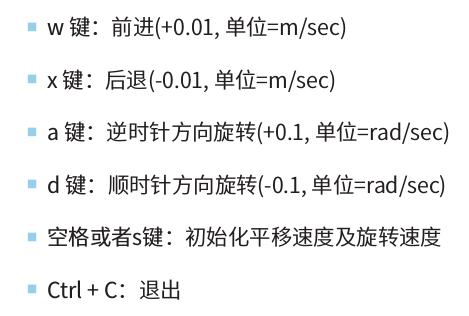
显示如下:
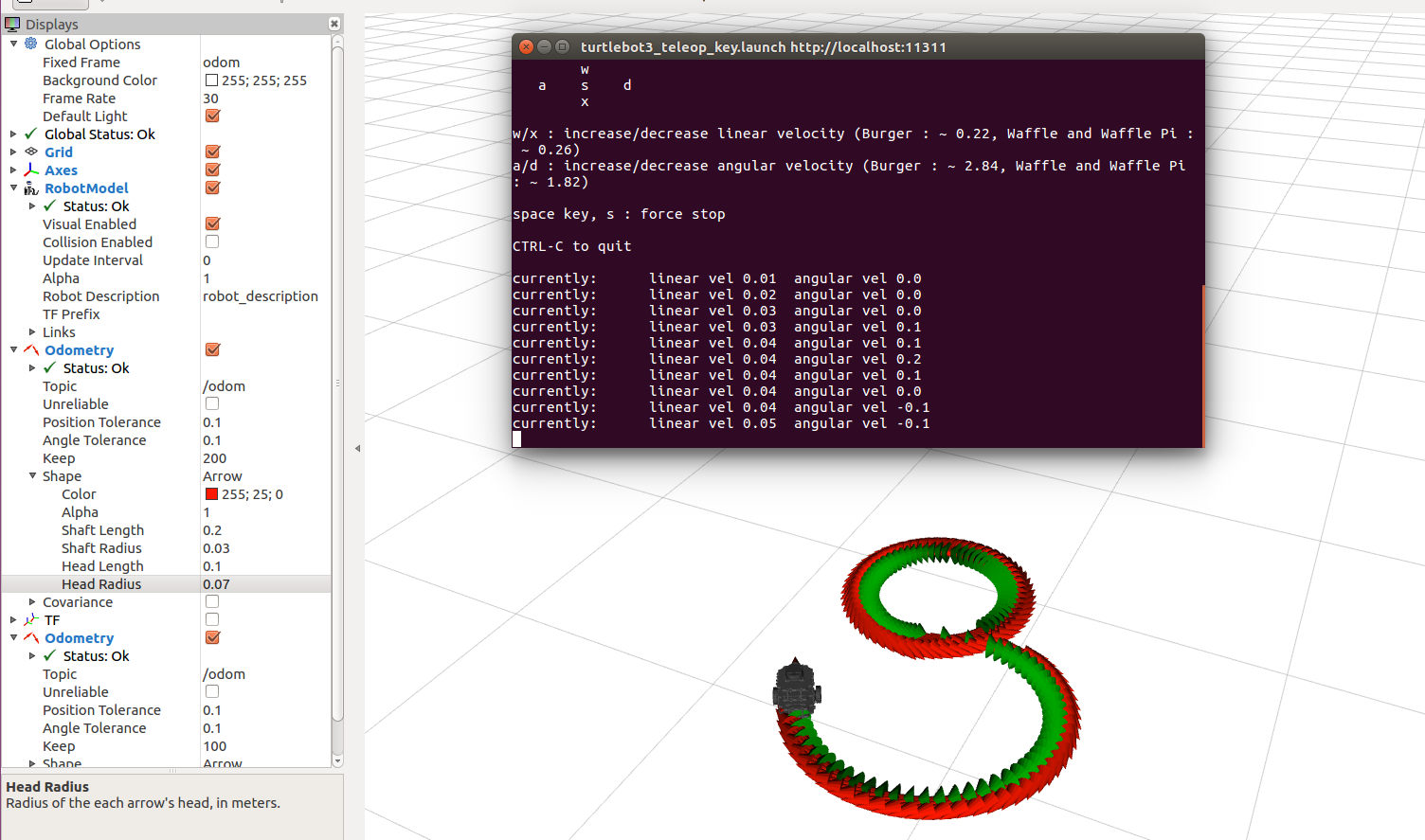
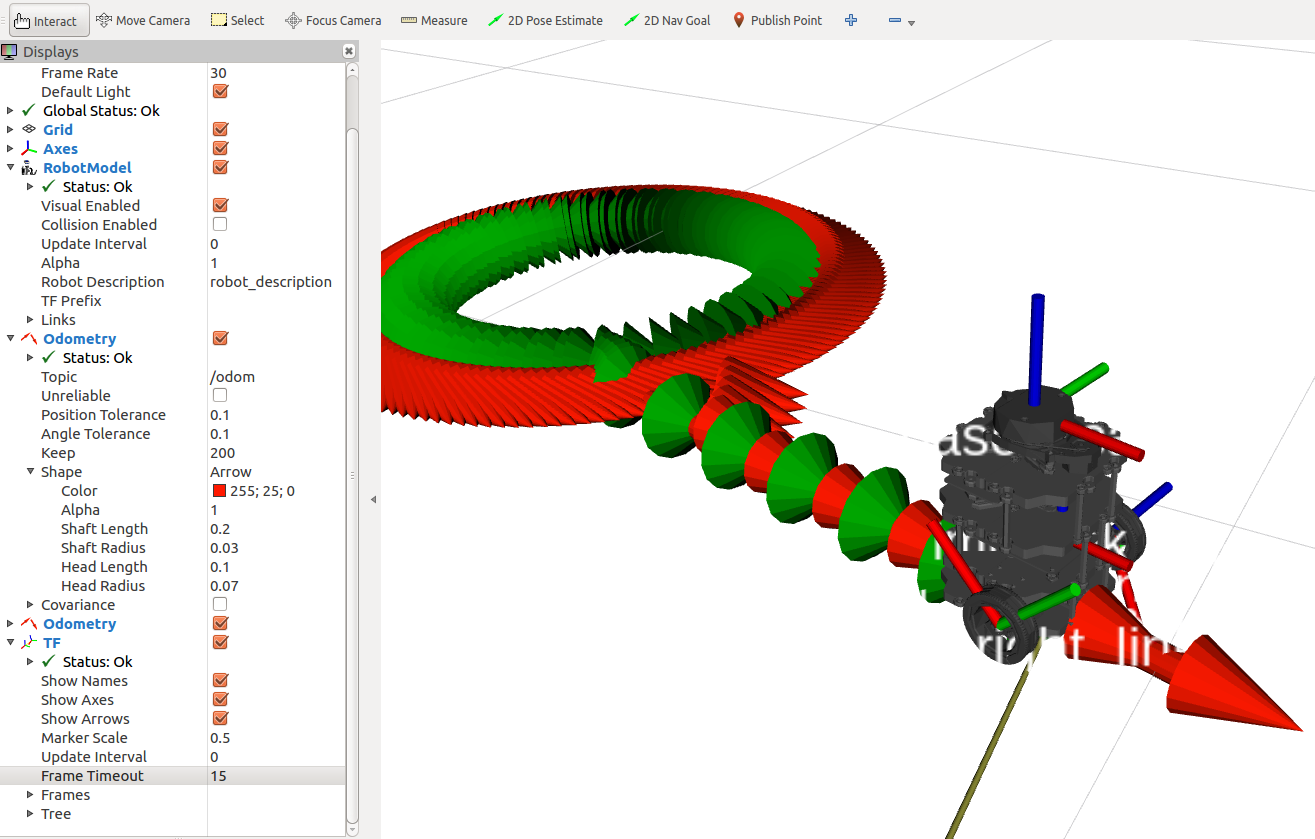
2.3 添加里程计信息
ADD->By Topic->Odometry
初始箭头很大,按图调整一下:
ADD->TF
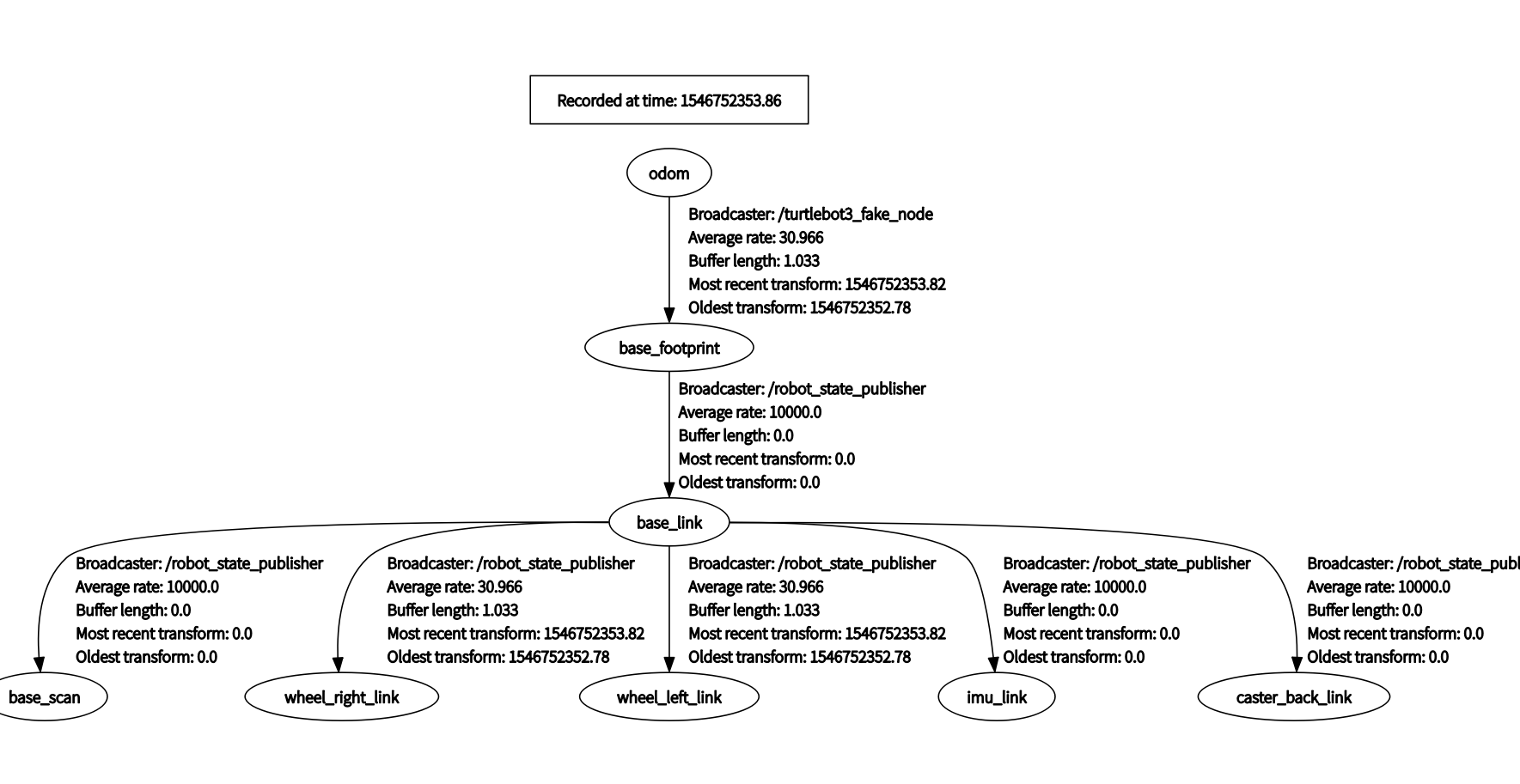
通过rqt_tf_tree查看tf话题
rosrun rqt_tf_tree rqt_tf_tree
-------------------------------------------
显示如下:
-END-
ROS-Rviz-turtlebot3仿真信息查看的更多相关文章
- Ubuntu 18.04 + ROS Melodic + TurtleBot3仿真
1. 下载安装包 官网地址: http://wiki.ros.org/action/show/Robots/TurtleBot?action=show&redirect=TurtleBot 所 ...
- ROS(indigo)_turtlebot仿真示例包括stage和gazebo
ROS(indigo)_turtlebot仿真示例包括stage和gazebo 现上参考网址: turtlebot:http://wiki.ros.org/Robots/TurtleBot stage ...
- 11g RAC集群启动关闭、各种资源检查、配置信息查看汇总。
简要:一:集群的启动与关闭 1. rac集群的手动启动[root@node1 bin]# ./crsctl start cluster -all2. 查看rac集群的状态[root@node1 bin ...
- node-webkit教程(13)gpu支持信息查看
node-webkit教程(13)gpu支持信息查看 文/玄魂 目录 node-webkit教程(13)gpu支持信息查看 前言 13.1操作步骤 (一)打开node-webkit,输入chrome: ...
- oracle10g 统计信息查看、收集
1. 统计信息查看 1.1 单个表的全局统计信息.统计效果查看 2. 统计信息分析(收集) 2.1 分析工具选择 2.2 分析前做index重建 2.3 分析某数据表,可以在PL/SQL的comm ...
- 【Python】 系统配置/进程等信息查看 psutil
psutil 原以为psutil只是跟进程有关的一个模块,没想到它其实提供了从CPU到内存各种各样的信息,十分IMBA.记录一下 我用了pip install psutil安装的这个模块,不过路中遇到 ...
- ROS(indigo)_pr2_simulator仿真(gazebo)示例
ROS(indigo)_pr2_simulator仿真(gazebo)示例 1 开启pr2仿真 ~$ roslaunch gazebo_ros empty_world.launch ~$ roslau ...
- linux基础之用户登录信息查看命令
用户登录信息查看命令 1.who命令 同一个账号通过不同终端登录也属于不同的登录信息,这里不同的终端包含虚拟终端和模拟终端,因为一个用户通过一个终端登录属于一个session 基本介绍 打印当前系统上 ...
- extract_by_one 根据二维数组中某字段来提取数组信息,查看有无重复信息
public function tt(){ $param = array( array ( 'hykno' => '2222222-CB', 'tcdk_fid' => '458B6D70 ...
随机推荐
- 常用图片、文字轮播插件SuperSlide
SuperSlide 是致力于实现网站统一特效调用的函数,能解决大部分标签切换.焦点图切换等效果,还能多个slide组合创造更多的效果.(兼容ie内核(包括无敌的ie6).webkit内核.ff.op ...
- 用LyX写中文幻灯片
虽然在虚拟机装了texlive以备使用,但是在不动CTeX的情况下,是否能使用LyX写中文幻灯片呢.网上只是寥寥几篇大神们在Linux用LyX的博文. 最近把论文交完写幻灯片,于是也把这个想法尝试了一 ...
- JavaScript实现鼠标效果
<html> <head> <meta charset="utf-8"> <title>无标题文档</title> &l ...
- Axis2 1.7.4构建项目
1.下载axis2项目文件 http://axis.apache.org/axis2/java/core/download.html 2.Maven文件的pom.xml文件 3.将下载的axis2-1 ...
- UML+模式设计概述
转自于:http://blog.csdn.net/rexuefengye/article/details/13020225 工程学:工程庞大到一定程度必须是用工程学方法,好比直接用水泥沙子建设实用的摩 ...
- 配置notepad++编程环境
1. 到 https://sourceforge.net/projects/mingw-w64/files/ 下载MinGW64,解压并移动到C盘根目录 2. 将 C:\MinGW64\bin 加入系 ...
- 查看tomcat的内存情况
查看现有tomcat的内存大小情况 1.启动tomcat 2.访问 http://localhost:8080/manager/status ,并输入您在安装tomcat时输入的用户与口令,如 adm ...
- Python操作Oracle
[root@oracle02 pythonsoftware]# rpm -ivh oracle-instantclient-basic-11.1.0.1-1.x86_64.rpm Preparing. ...
- a rel=noopener
看vue-element-admin的源码的时候,看到a 标签使用 rel=noopener: 然后就很奇怪这个是干什么用的:然后百度到一篇文章,涨知识了. 个人的理解是:不加 rel=noopen ...
- 一个单元格占两行三列的HTML代码为
主要是这两个属性: colspan 单元格占多少列 rowspan 单元格占多少行 <table width="200" border="1">&l ...