C++11 线程同步接口std::condition_variable和std::future的简单使用
std::condition_variable
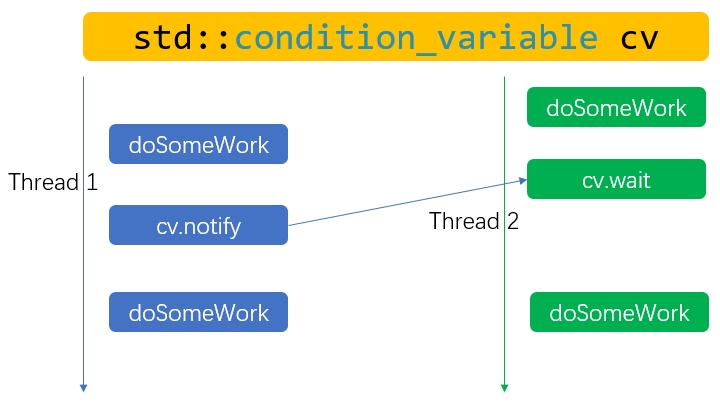
条件变量std::condition_variable有wait和notify接口用于线程间的同步。如下图所示,Thread 2阻塞在wait接口,Thread 1通过notify接口通知Thread 2继续执行。
具体参见示例代码:
#include<iostream>
#include<mutex>
#include<thread>
#include<queue>
std::mutex mt;
std::queue<int> data;
std::condition_variable cv;
auto start=std::chrono::high_resolution_clock::now();
void logCurrentTime()
{
auto end = std::chrono::high_resolution_clock::now();
auto elapsed = std::chrono::duration_cast<std::chrono::milliseconds>(end - start).count();
std::cout << elapsed << ":";
}
void prepare_data()
{
logCurrentTime();
std::cout << "this is " << __FUNCTION__ << " thread:" << std::this_thread::get_id() << std::endl;
for (int i = 0; i < 10; i++)
{
data.push(i);
logCurrentTime();
std::cout << "data OK:" << i << std::endl;
}
//start to notify consume_data thread data is OK!
cv.notify_one();
}
void consume_data()
{
logCurrentTime();
std::cout << "this is: " << __FUNCTION__ << " thread:" << std::this_thread::get_id() << std::endl;
std::unique_lock<std::mutex> lk(mt);
//wait first for notification
cv.wait(lk); //it must accept a unique_lock parameter to wait
while (!data.empty())
{
logCurrentTime();
std::cout << "data consumed: " << data.front() << std::endl;
data.pop();
}
}
int main()
{
std::thread t2(consume_data);
//wait for a while to wait first then prepare data,otherwise stuck on wait
std::this_thread::sleep_for(std::chrono::milliseconds(10));
std::thread t1(prepare_data);
t1.join();
t2.join();
return 0;
}
输出结果
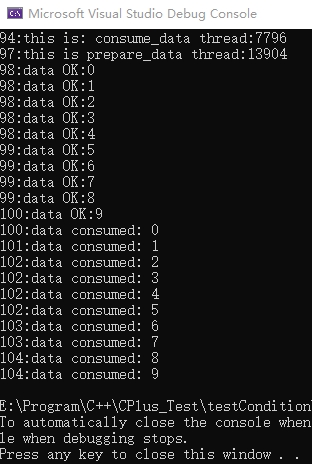
分析
主线程中另启两个线程,分别执行consume_data和prepare_data,其中consume_data要先执行,以保证先等待再通知,否则若先通知再等待就死锁了。首先consume_data线程在从wait 处阻塞等待。后prepare_data线程中依次向队列写入0-10,写完之后通过notify_one 通知consume_data线程解除阻塞,依次读取0-10。
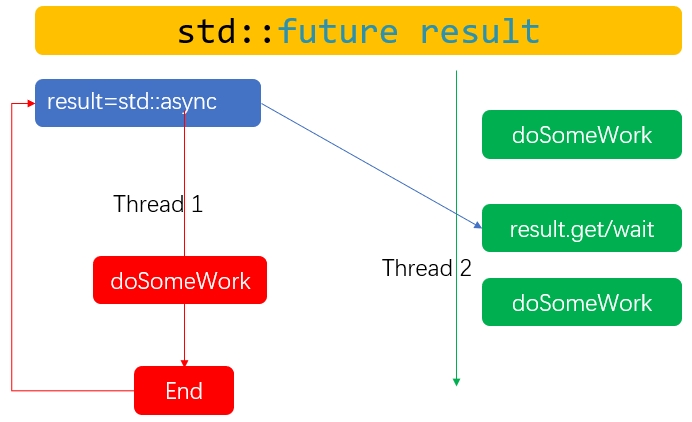
std::future
std::future与std::async配合异步执行代码,再通过wait或get接口阻塞当前线程等待结果。如下图所示,Thread 2中future接口的get或wait接口会阻塞当前线程,std::async异步开启的新线程Thread1执行结束后,将结果存于std::future后通知Thread 1获取结果后继续执行.
具体参见如下代码:
#include <iostream>
#include <future>
#include<thread>
int test()
{
std::cout << "this is " << __FUNCTION__ << " thread:" << std::this_thread::get_id() << std::endl;;
std::this_thread::sleep_for(std::chrono::microseconds(1000));
return 10;
}
int main()
{
std::cout << "this is " <<__FUNCTION__<<" thread:" << std::this_thread::get_id() << std::endl;;
//this will lanuch on another thread
std::future<int> result = std::async(test);
std::cout << "After lanuch a thread: "<< std::this_thread::get_id() << std::endl;
//block the thread and wait for the result
std::cout << "result is: " <<result.get()<< std::endl;
std::cout << "After get result "<< std::endl;
return 0;
}
输出结果
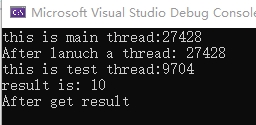
分析
主程序中调用std::async异步调用test函数,可以看到main函数的线程ID 27428与test函数执行的线程ID 9704并不一样,说明std::async另起了一个新的线程。在test线程中,先sleep 1000ms,所以可以看到"After lanuch a thread:"先输出,说明主线程异步执行,不受子线程影响。而"After get result "最后输出,说明get()方法会阻塞主线程,直到获取结果。
C++11 线程同步接口std::condition_variable和std::future的简单使用的更多相关文章
- 基于std::mutex std::lock_guard std::condition_variable 和std::async实现的简单同步队列
C++多线程编程中通常会对共享的数据进行写保护,以防止多线程在对共享数据成员进行读写时造成资源争抢导致程序出现未定义的行为.通常的做法是在修改共享数据成员的时候进行加锁--mutex.在使用锁的时候通 ...
- APUE学习笔记——11 线程同步、互斥锁、自旋锁、条件变量
线程同步 同属于一个进程的不同线程是共享内存的,因而在执行过程中需要考虑数据的一致性. 假设:进程有一变量i=0,线程A执行i++,线程B执行i++,那么最终i的取值是多少呢?似乎一定 ...
- 第30课 线程同步(std::condition_variable)
一. 条件变量 (一)条件变量概述 多线程访问一个共享资源(或称临界区),不仅需要用互斥锁实现独享访问避免并发错误,在获得互斥锁进入临界区后,还需检查特定条件是否成立.当某个线程修改测试条件后,将通知 ...
- C++11并发——多线程条件变量std::condition_variable(四)
https://www.jianshu.com/p/a31d4fb5594f https://blog.csdn.net/y396397735/article/details/81272752 htt ...
- C++11 并发指南五(std::condition_variable 详解)
前面三讲<C++11 并发指南二(std::thread 详解)>,<C++11 并发指南三(std::mutex 详解)>分别介绍了 std::thread,std::mut ...
- 转 C++11 并发指南std::condition_variable详解
之前看过,但是一直没有怎么用就忘了,转一篇别人的文字记录下来 本文将介绍 C++11 标准中 <condition_variable> 头文件里面的类和相关函数. <conditio ...
- C++11 并发指南五(std::condition_variable 详解)(转)
前面三讲<C++11 并发指南二(std::thread 详解)>,<C++11 并发指南三(std::mutex 详解)>分别介绍了 std::thread,std::mut ...
- 【转】C++11 并发指南五(std::condition_variable 详解)
http://www.cnblogs.com/haippy/p/3252041.html 前面三讲<C++11 并发指南二(std::thread 详解)>,<C++11 并发指南三 ...
- c++11 线程:让你的多线程任务更轻松
介绍 本文旨在帮助有经验的Win32程序员来了解c++ 11线程库及同步对象 和 Win32线程及同步对象之间的区别和相似之处. 在Win32中,所有的同步对象句柄(HANDLE)是全局句柄.它们 ...
- c++11 线程池学习笔记 (一) 任务队列
学习内容来自一下地址 http://www.cnblogs.com/qicosmos/p/4772486.html github https://github.com/qicosmos/cosmos ...
随机推荐
- [oeasy]python0004_游乐场_和python一起玩耍_python解释器_数学运算
和python玩耍 Python 回忆 上次 了解shell环境中的命令 命令 作用 whoami 显示当前用户名 pwd 显示当前文件夹 ls 列出当前文件夹下的内容 python3 仿佛进入大于号 ...
- [oeasy]python0125_汉字打印机_点阵式打字机_汉字字形码
汉字字形码 回忆上次内容 IBM 将 ASCII 扩展之后 规定了 一个字节的字符集 并制作了 相应的字形库 添加图片注释,不超过 140 字(可选) 这种显示模式和字符大小之下 中文 ...
- oeasy教您玩转linux 010211 牛说 cowsay
我们来回顾一下 上一部分我们都讲了什么? 软件包工具是 apt 软件包不但能下载,也能升级,还能删除 专门管理软件包的 aptitude 这次我们下载个牛说 cowsay: sudo apt inst ...
- iframe嵌入svg图片动态更改文本样式并进行缩放等功能实现拓扑图
好久没更了,近期开发遇到的需求,抽空梳理一下~ 需求:实现一个复杂的拓扑图,图中元素的个数,以及各个参数内容是动态展示的. 于是让ui提供了对应的svg图片. 解决思路:使用iframe嵌入svg图片 ...
- linux性能资源分析工具
linux性能资源分析工具 1,top 2,ps 3,uptime 4,mpstat 5,pidstat 6,vmstat 7,iostat 8,netstat 9,lsof 10,sar / nmo ...
- web3的的入口,钱包,为什么说加密钱包是Web 3活动入口
Web3.0让未来充满了想象力,或许超越当今人类所知的互联网.有可能彻底改变人类社交互动.商业往来和整个互联网经济.同时数字加密货币行业从业者对Web 3.0赋予了很高期待,希望通过结合后打破互联网巨 ...
- 【H5】01 入门 & 概述
前言 看了很多教程资料,很难受,东西讲不全,一些属性就是简单的解释就没了,不能追根问底的了解这个东西,所以在后面, 越是学习就越是费解,出现的问题也越来越多.什么快速学完都是不存在的,培训机构的东西也 ...
- 使用Aspire优雅的进行全栈开发——WinUI使用Semantic Kernel调用智普清言LLM总结Asp.Net Core通过Playwright解析的网页内容
前言 这算是一篇学习记录博客了,主要是学习语义内核(Semantic Kernel)的实践,以及Aspire进行全栈开发的上手体验,我是采用Aspire同时启动API服务,Blazor前端服务以及Wi ...
- 从.net开发做到云原生运维(一)——从.net framework过渡到.net core
1. 前言 序篇讲了自己的一些感悟和经历,从这章开始就开始讲一些.net技术栈的东西了. 2. .net framework和.net core对比 .NET Framework 概述 .NET Fr ...
- 学术写作: These authors contributed equally to this work. —— 共同一作
早些年很少看到论文里面有: These authors contributed equally to this work. 不过现在这种方法在论文中出现的还是比较多的,说白了,这种共同一作的声明其实是 ...