QEMU + Vscode + Arm Arch's Linux调试小记
QEMU + Vscode + Arm Arch's Linux调试小记
前几天看到了一篇讲授如何调试ARM Linux内核的文章,这里现在记录一下调试ARM Linux内核的办法
下载QEMU
对于Arch Linux用户而言,没有必要自己编译,直接上AUR源下载就行。我自己有打算研究和调试多个架构,所以我自己下载了:
yay -S qemu-full
关于什么是QEMU:https://wiki.archlinux.org/title/QEMU
AUR源:https://archlinux.org/packages/extra/x86_64/qemu-full/
如果只是想要调试ARM64位linux,需要下载的是aarch版本的。
下载完成之后,可以看看自己是否可以正常启动:
qemu-system-aarch64 --version
QEMU emulator version 9.0.1
Copyright (c) 2003-2024 Fabrice Bellard and the QEMU Project developers
下载aarch64-gcc
yay -S aarch64-linux-gnu-gcc
aarch64-linux-gnu-gcc -v
Using built-in specs.
COLLECT_GCC=aarch64-linux-gnu-gcc
COLLECT_LTO_WRAPPER=/usr/lib/gcc/aarch64-linux-gnu/14.1.0/lto-wrapper
Target: aarch64-linux-gnu
Configured with: /build/aarch64-linux-gnu-gcc/src/gcc-14.1.0/configure --prefix=/usr --program-prefix=aarch64-linux-gnu- --with-local-prefix=/usr/aarch64-linux-gnu --with-sysroot=/usr/aarch64-linux-gnu --with-build-sysroot=/usr/aarch64-linux-gnu --with-native-system-header-dir=/include --libdir=/usr/lib --libexecdir=/usr/lib --target=aarch64-linux-gnu --host=x86_64-pc-linux-gnu --build=x86_64-pc-linux-gnu --disable-nls --enable-default-pie --enable-languages=c,c++,fortran --enable-shared --enable-threads=posix --with-system-zlib --with-isl --enable-__cxa_atexit --disable-libunwind-exceptions --enable-clocale=gnu --disable-libstdcxx-pch --disable-libssp --enable-gnu-unique-object --enable-linker-build-id --enable-lto --enable-plugin --enable-install-libiberty --with-linker-hash-style=gnu --enable-gnu-indirect-function --disable-multilib --disable-werror --enable-checking=release
Thread model: posix
Supported LTO compression algorithms: zlib zstd
gcc version 14.1.0 (GCC)
下载BusyBox
这个比较遗憾,因为我们是调试ARM架构的,所以文件系统的架构基础必须是ARM,否则文件系统无法识别,为此我们不得不干脏活:手动编译ARM版本的BusyBox
Downloads: https://www.busybox.net/downloads/
busybox-1.36.1.tar.bz2: https://www.busybox.net/downloads/busybox-1.36.1.tar.bz2
下一步就是配置,好玩的是:我们需要更改一下menuconfig的文件:
你可以先尝试make menuconfig,不过马上就会给你抛错:说找不到libncurse5,其实不然,改一下shell脚本就行:
也就是把main改成int main就好
下一步就是:
make menuconfig
Settings --->
[*] Build static binary (no shared libs)
指定编译架构和参数
export ARCH=arm64
export CROSS_COMPILE=aarch64-linux-gnu-
make && make install
我们所有的文件就会出现在源代码根目录下的_install里,下面比较麻烦——为了制作操作系统的可用文件系统,必须多加点
cd _install
mkdir etc dev lib
➜ ls
bin/ dev/ etc/ lib/ linuxrc@ sbin/ usr/
下面依次创建文件:
在etc目录下:
profile
#!/bin/sh
export HOSTNAME=Charliechen
export USER=root
export HOME=/home
export PS1="[$USER@$HOSTNAME \W]\# "
PATH=/bin:/sbin:/usr/bin:/usr/sbin
LD_LIBRARY_PATH=/lib:/usr/lib:$LD_LIBRARY_PATH
export PATH LD_LIBRARY_PATH
inittab
::sysinit:/etc/init.d/rcS
::respawn:-/bin/sh
::askfirst:-/bin/sh
::ctrlaltdel:/bin/umount -a -r
fstab
#device mount-point type options dump fsck order
proc /proc proc defaults 0 0
tmpfs /tmp tmpfs defaults 0 0
sysfs /sys sysfs defaults 0 0
tmpfs /dev tmpfs defaults 0 0
debugfs /sys/kernel/debug debugfs defaults 0 0
kmod_mount /mnt 9p trans=virtio 0 0
新建一个init.d文件夹:
里面放入文件
rcS
mkdir -p /sys
mkdir -p /tmp
mkdir -p /proc
mkdir -p /mnt
/bin/mount -a
mkdir -p /dev/pts
mount -t devpts devpts /dev/pts
echo /sbin/mdev > /proc/sys/kernel/hotplug
mdev -s
改一下权限:
chmod 777 rcS
- busybox 作为linuxrc启动后, 会读取/etc/profile, 这里面设置了一些环境变量和shell的属性
- 根据/etc/fstab提供的挂载信息, 进行文件系统的挂载
- busybox 会从 /etc/inittab中读取sysinit并执行, 这里sysinit指向了/etc/init.d/rcS
- /etc/init.d/rcS 中 ,mdev -s 这条命令很重要, 它会扫描/sys目录,查找字符设备和块设备,并在/dev下mknod
我们继续:在dev目录下创建console文件
cd _install/dev
sudo mknod console c 5 1
拷贝aarch目录下的lib动态文件到lib目录,让动态运行文件可以执行:
cd _install/lib
cp /usr/aarch64-linux-gnu/lib/*.so* -a .
编译linux 6.9.5的内核
make defconfig ARCH=arm64
修改.config的这些配置:
CONFIG_DEBUG_INFO=y # 更多的调试信息
CONFIG_INITRAMFS_SOURCE="./root" # 文件系统在哪?
CONFIG_INITRAMFS_ROOT_UID=0
CONFIG_INITRAMFS_ROOT_GID=0
注意,上面的信息务必是:存在则修改,不存在添加!
在Linux源码目录下添加一个root文件夹,其实这对应的是CONFIG_INITRAMFS_SOURCE的位置:
mkdir root
sudo cp -r path/to/your/busybox_source_code/_install ./root
make ARCH=arm64 Image -j8 CROSS_COMPILE=aarch64-linux-gnu-
泡杯茶老铁!
启动!
/usr/local/bin/qemu-system-aarch64
-m 512M # 内存为512M
-smp 4 # 4核
-cpu cortex-a57 # cpu 为cortex-a57
-machine virt
-kernel arch/arm64/boot/Image # kernel镜像文件
-append "rdinit=/linuxrc nokaslr console=ttyAMA0 loglevel=8"
# 传给kernel 的cmdline参数。其中rdinit指定了init进程;nokaslr 禁止内核起始地址随机化,这个很重要, 否则GDB调试可能有问题;console=ttyAMA0指定了串口,没有这一步就看不到linux的输出
-nographic # 禁止图形输出
-s # 监听gdb端口, gdb程序可以通过1234这个端口连上来。
qemu-system-aarch64 -m 512M -smp 4 -cpu cortex-a57 -machine virt -kernel arch/arm64/boot/Image -append "rdinit=/linuxrc nokaslr console=ttyAMA0 loglevel=8" -nographic -s
启动起来!
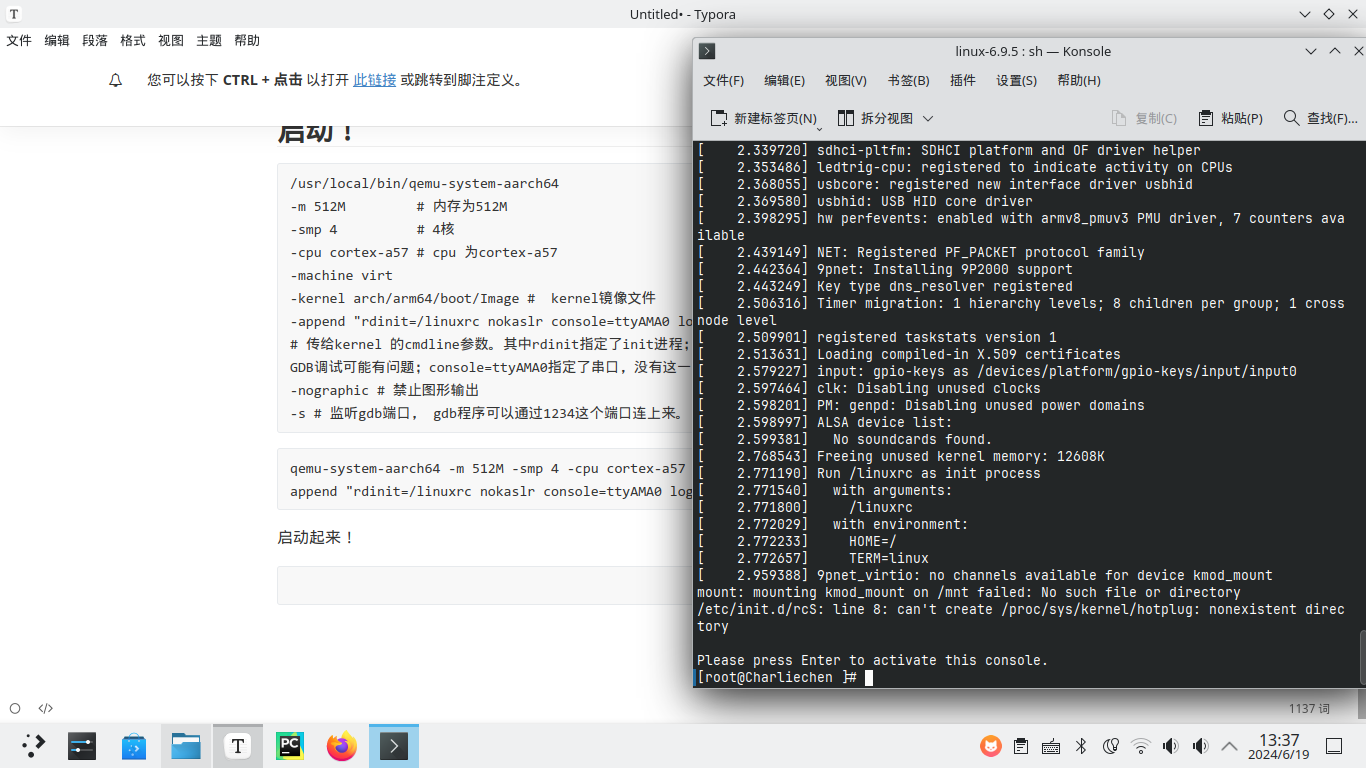
成功运行!
链接到vscode进行远程调试
我们在Linux源代码根目录下code .
非上位机架构需要使用gdb-multiarch来调试!
yay -S gdb-multiarch
在.vscode文件处添加launch.json文件:
➜ cat .vscode/launch.json
{
// 使用 IntelliSense 了解相关属性。
// 悬停以查看现有属性的描述。
// 欲了解更多信息,请访问: https://go.microsoft.com/fwlink/?linkid=830387
"version": "0.2.0",
"configurations": [
{
"name": "kernel debug",
"type": "cppdbg",
"request": "launch",
"program": "${workspaceFolder}/vmlinux",
"cwd": "${workspaceFolder}",
"MIMode": "gdb",
"miDebuggerPath":"/usr/bin/gdb-multiarch",
"miDebuggerServerAddress": "localhost:1234"
}
]
}⏎
下一步可能出错的是——没有对应版本的py,这个自信寻找aur源,我当时缺少的是python311,所以在aur源搜索python+版本号就可以出来,举个例子少python3,7搜python37就OK!
之后我们就可以顺利的启动起来了:
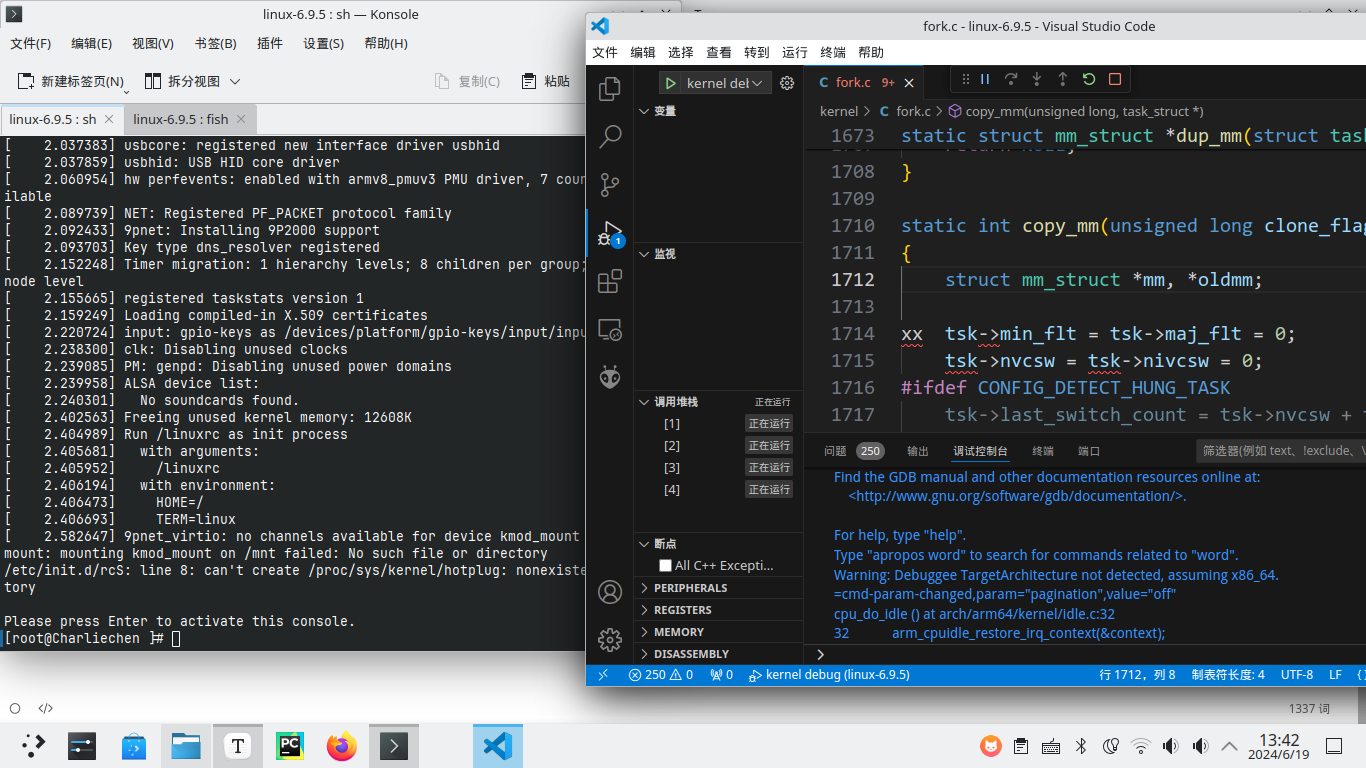
下一步就是——打个断点试试看:我打在了kernel/fork.c的copy_mm函数!相信大家熟悉linux内核开发的都知道这个是什么(喜)
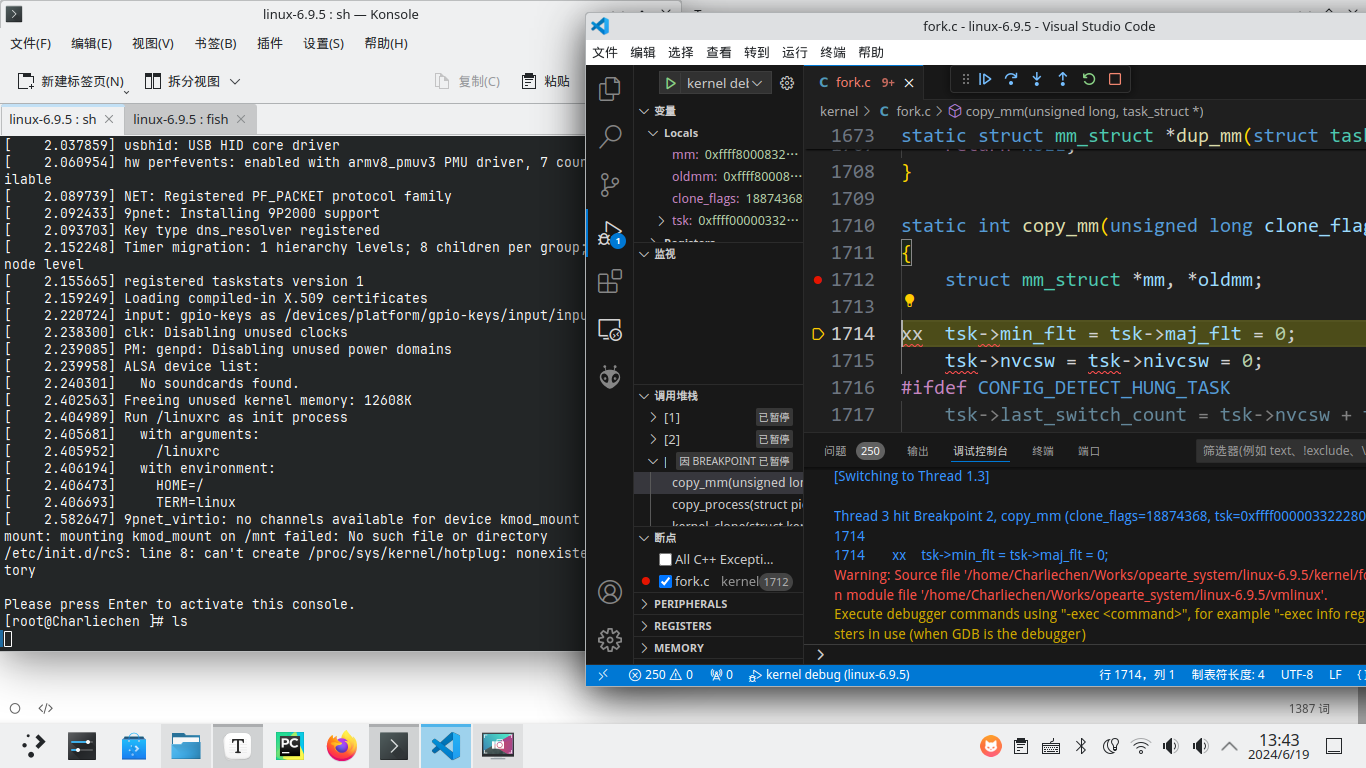
打好断点,输入ls并且回车,就可以看到断点生效!
Reference
https://zhuanlan.zhihu.com/p/510289859
QEMU + Vscode + Arm Arch's Linux调试小记的更多相关文章
- Qemu搭建ARM vexpress开发环境(二)----通过u-boot启动Linux内核
Qemu搭建ARM vexpress开发环境(二)----通过u-boot启动Linux内核 标签(空格分隔): Qemu ARM Linux 在上文<Qemu搭建ARM vexpress开发环 ...
- 基于QEMU的ARM Cortex-A9开发板Vexpress-ca9的Linux内核的编译和运行
宿主机:Ubuntu16.04 x64(Linux内核4.4.0) 交叉编译工具链:gcc-arm-linux-gnueabiarm-linux-gcc:4.4.3QEMU:2.5.0Linux ke ...
- 【转帖】Linux系统上面qemu 模拟arm
零基础在Linux系统搭建Qemu模拟arm https://blog.csdn.net/weixin_42489042/article/details/81145038 自己没搞定 改天再试试 感谢 ...
- 初学银河麒麟linux笔记 第九章 QEMU安装arm虚拟机
arm虚拟机无法用vm进行安装,因此需要安装QEMU虚拟机 参考: WIndows下使用Qemu安装Arm版Kylin系统_h1007886499的博客-CSDN博客_windows qemu arm ...
- Qemu搭建ARM vexpress开发环境(一)
Qemu搭建ARM vexpress开发环境(一) 标签(空格分隔): Qemu ARM Linux 嵌入式开发离不开硬件设备比如:开发板.外设等,但是如果只是想学习研究Linux内核,想学习Linu ...
- Qemu搭建ARM vexpress开发环境(三)----NFS网络根文件系统
Qemu搭建ARM vexpress开发环境(三)----NFS网络根文件系统 标签(空格分隔): Qemu ARM Linux 经过上一篇<Qemu搭建ARM vexpress开发环境(二)- ...
- 基于 QEMU进行 arm 仿真开发 (以 vexpress-a9 为例)
背景 基于 QEMU 的仿真可以节省 硬件成本. 参考:<qemu-system-arm仿真vexpress-a9踩坑记>.<在Ubuntu下使用QEMU搭建arm开发环境(一)搭建 ...
- 掌握 Linux 调试技术
掌握 Linux 调试技术 在 Linux 上找出并解决程序错误的主要方法 Steve Best (sbest@us.ibm.com)JFS 核心小组成员,IBM 简介: 您可以用各种方法来监控运行着 ...
- 【记录】尝试用QEMU模拟ARM开发板去加载并运行Uboot,kernel,rootfs【转】
转自:https://www.crifan.com/try_use_qemu_emulate_arm_board_to_load_and_run_uboot_kernel_rootfs/ [背景] 手 ...
- VS2017 远程调试小记
VS2017 远程调试小记 支持windows\linux\macos, 直接连接项目点的上线版本代码进行调试.保证bug在同个环境下实时追踪. 注意点 双方的 msvsmon.exe版本需一致,最好 ...
随机推荐
- ansible系列(21)--ansible的变量注册Register
1. 变量注册Register register 关键字可以将某个 task 任务结果存储至变量中,最后使用 debug模块 输出变量内容,可以用于后续排障: 示例一:register的基本使用: # ...
- CompletableFuture学习总结
CompletableFuture 简介 在Java8中,CompletableFuture提供了非常强大的Future的扩展功能,可以帮助我们简化异步编程的复杂性,并且提供了函数式编程的能力,可以通 ...
- 对于Docker和Podman的一点使用经验
前言:本文会以多个实际的线上例子,分享自己对于Docker和Podman的一点使用经验及踩过的坑,希望对读者有一点帮助. 本文bash脚本初步加工后可直接使用(兼容mac和linux系统),对于关键点 ...
- csapp-datalab(菜鸟小白版)
第1题: /* * bitXor - x^y using only ~ and & * Example: bitXor(4, 5) = 1 * Legal ops: ~ & * Max ...
- leaflet 使用turfjs实现前端自定义插值
Turf.js官网地址:http://turfjs.org/ Turf.js中的几何数据组织规范以WKT格式为标准.其官网中包含了详细的接口介绍和样例讲解.这里我给出我们需要用的接口: 参考地址: h ...
- 高性能远程控制软件,完美替代Anydesk
Anydesk是一款来自德国的远程软件,据悉是Teamviewer团队成员出来独立门户做的.Anydesk给人一种小而美的感觉,软件体积小,性能高,被视为Teamviewer的替代产品.现在,AnyD ...
- JDK源码阅读-------自学笔记(十一)(java.lang.String包装类)
核心要点 String 类对象代表不可变的Unicode字符序列,因此我们可以将String对象称为"不可变对象" String的核心就是char[]字符串,外部写的string对 ...
- Axure和墨刀——两款原型设计工具介绍
Axure与墨刀是两款在原型设计领域广受欢迎的工具,各具特点和优势: Axure: Axure RP是一款功能强大的原型设计工具,广泛应用于交互设计和用户体验设计领域.它提供了丰富的交互元素库.高保真 ...
- .net C# System.Text.Json 如何将 string类型的“true”转换为布尔值 解决方案
直接上解决方法的代码 先定义一个转换顺,代码如下: public sealed class AnhBoolConverter : JsonConverter<bool?> { public ...
- windows下载安装ipopt求解器 可用于pyomo调用
方案一:采用官方编译的应用程序 官方对windows下有已经编译好的应用程序,只需要下载下来,并将ipopt的应用程序所在文件夹路径添加到系统全局环境变量就可以了.这样在利用pyomo或者其他建模工具 ...