pointnet
无序性:虽然输入的点云是有顺序的,但是显然这个顺序不应当影响结果。
点之间的交互:每个点不是独立的,而是与其周围的一些点共同蕴含了一些信息,因而模型应当能够抓住局部的结构和局部之间的交互。
变换不变性:比如点云整体的旋转和平移不应该影响它的分类或者分割
作者:隅子酱
链接:https://zhuanlan.zhihu.com/p/75145963
来源:知乎
著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。
pointnet的更多相关文章
- 3D点云数据分析:pointNet++论文分析及阅读笔记
PointNet的缺点: PointNet不捕获由度量空间点引起的局部结构,限制了它识别细粒度图案和泛化到复杂场景的能力. 利用度量空间距离,我们的网络能够通过增加上下文尺度来学习局部特征. 点集通常 ...
- 3d图像识别基础论文:pointNet阅读笔记
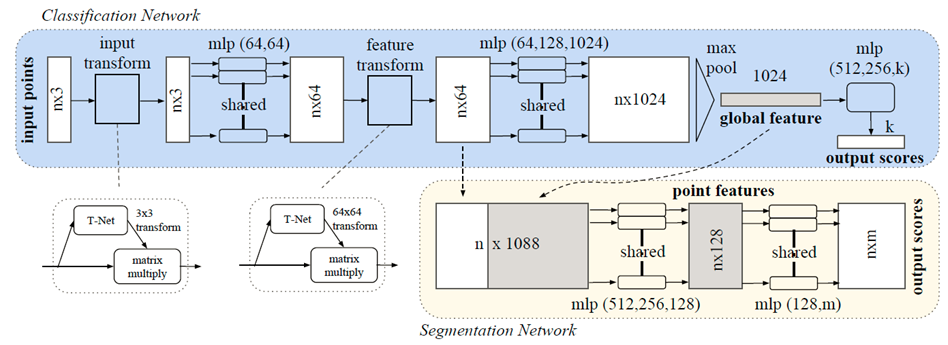
PointNet 论文阅读: 主要思路:输入独立的点云数据,进行变换不变性处理(T-net)后,通过pointNet网络训练后,最后通过最大池化和softMax分类器,输出评分结果. 摘要: 相较于之 ...
- 三维CNN:收集一些最近的3d卷积网络PointNet++
PointNet++是在PointNet上做出了改进,考虑了点云局部特征提取,从而更好地进行点云分类和分割. 先简要说一下PointNet: PointNet,其本质就是一种网络结构,按一定的规则输入 ...
- pointNet代码
介绍 组成 1.PointNet classification network分类网络 part segmentation network 数据集 1.point clouds sampled fro ...
- PointNet++作者的视频讲解文字版
转载请注明本文链接: https://www.cnblogs.com/Libo-Master/p/9759130.html PointNet: Deep Learning on Point Sets ...
- pointnet++之classification/train.py
1.数据集加载 if FLAGS.normal: assert(NUM_POINT<=10000) DATA_PATH = os.path.join(ROOT_DIR, 'data/modeln ...
- pointnet++的pytorch实现
代码参考:https://blog.csdn.net/weixin_39373480/article/details/88934146 def recognize_all_data(test_area ...
- pointnet++之scannet/train.py
1.作者可能把scannet数据集分成了训练集和测试集并处理成了.pickle文件. 2.在代码运行过程中,作者从.pickle文件中读出训练集1201个场景的x.y.z坐标和测试集312个场景的x. ...
- pointnet.pytorch代码解析
pointnet.pytorch代码解析 代码运行 Training cd utils python train_classification.py --dataset <dataset pat ...
- 论文笔记:(NIPS2017)PointNet++: Deep Hierarchical Feature Learning on Point Sets in a Metric Space
目录 一. 存在的问题 1.提取局部特征的能力 2.点云密度不均问题 二.解决方案 1.改进特征提取方法: (1)采样层(sampling) (2)分组层(grouping) (3)特征提取层(fea ...
随机推荐
- buildroot output子目录
build/ 包含所有的源文件,包括 Buildroot 所需主机工具和选择的包,这个目录包含所有 模块源码. host/ 主机端编译需要的工具包括交叉编译工具. images/ 包含压缩好的根文件系 ...
- NetCore 开发时中文编码转换出现异常
在C#编程的时候难免会遇到需要转换编码的场合. 在Framwork中可以用System.Text.Encoding解决,但是到了core会发现,虽然也有这个东西,但几个关键的中文编码(比如GB2312 ...
- 1 datax 安装和简单使用
DataX 是阿里巴巴集团内被广泛使用的离线数据同步工具/平台,实现包括 MySQL.Oracle.SqlServer.Postgre.HDFS.Hive.ADS.HBase.TableStore(O ...
- @JsonView的使用
1.使用场景 在某一些请求返回的JSON中,我们并不希望返回某些字段.而在另一些请求中需要返回某些字段. 例如: 在查询列表请求中,不返回password字段 在获取用户详情中,返回password字 ...
- Laravel源码解析之model(代码)
本篇文章给大家带来的内容是关于Laravel源码解析之model(代码),有一定的参考价值,有需要的朋友可以参考一下,希望对你有所帮助. 前言 提前预祝猿人们国庆快乐,吃好.喝好.玩好,我会在电视上看 ...
- springmvc全局异常处理ControllerAdvice区分返回响应类型是页面还是JSON
思路: 加一个拦截器,在preHandler中取得HandlerMethod,判断其方法的返回类型,以及方法的注解和类的注解. 如果返回是json,收到异常则返回默认的异常包装类型. 如果返回是页面, ...
- THUPC2019/CTS2019/APIO2019自闭记
自闭了,自闭选手不配拥有游记.
- XmlExtensions帮助类
public static class XmlExtensions { static Lazy<XmlWriterSettings> _settings = new Lazy<Xml ...
- 【USACO题库】1.3.4 Prime Cryptarithm牛式
好久没有发题解了,今天发一个很久很久之前写过得题吧 题目其实莫名的难 但是理解后,原来就是一只纸老虎 题目加工中~~~~(缩短题目) 加工完成:已知数字1-9组成集合的一个子集,求满足题意乘法步骤的情 ...
- DevExpress的下拉框控件LookUpEdit的使用、添加item选项值、修改默认显示值
场景 Winform控件-DevExpress18下载安装注册以及在VS中使用: https://blog.csdn.net/BADAO_LIUMANG_QIZHI/article/details/1 ...