【转】android camera(四):camera 驱动 GT2005
关键词:android camera CMM 模组 camera参数 GT2005 摄像头常见问题
平台信息:
内核:linux
系统:android
平台:S5PV310(samsung exynos 4210)
作者:xubin341719(欢迎转载,请注明作者)
android camera(一):camera模组CMM介绍
android camera(二):摄像头工作原理、s5PV310 摄像头接口(CAMIF)
android camera(三):camera V4L2 FIMC
android camera(四):camera 驱动 GT2005
摄像头主要参数:
1、MCLK 24MHz;
2、PCLK 48~52MHz~;
3、电压 1.8V(1.5V)、2.8V;
4、scl(IIC时钟)100KHz或者400KHz。
一、摄像头驱动
我们以GT2005为例,来讲述一个摄像头驱动的调试过程:
摄像头和主控的关系图,如下:
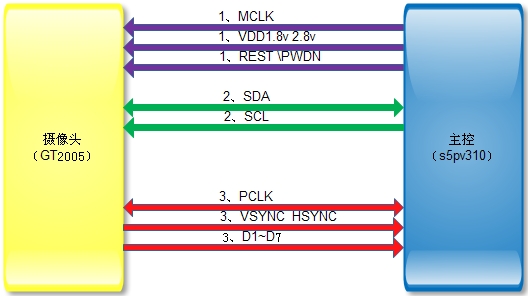
摄像头驱动比较简单,完成一面三大步就可以:
摄像头的上电、时钟这些基本条件;
IIC保证摄像头的初始化;
摄像头工作后传回数据到主控。
完成这三个步骤就完成了摄像头基本工作的调试。
1、 摄像头的上电、时钟这些基本条件的实现
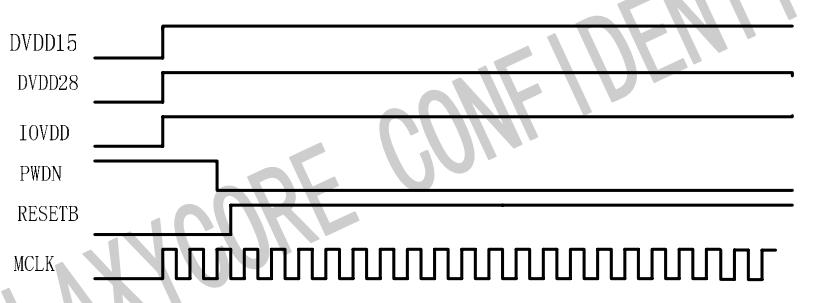
电源部分,上电时对应规格书,确认上电时序;MCLK摄像头的主时钟是否提供,看下面是和电和规格书中的
(1)、主意摄像头工作要两组电压:1.8V(1.5V)、2.8V还有MCLK
程序中对电源控制:我们在arch\arm\mach-smdkv310.c中,完成上面两个步骤的代码,(这一点不同平台也许有所不同,这里这是一个实例,这部分代码只是针对三星平台的)
#ifdef CONFIG_VIDEO_GT2005
static void set_cam2005_main_power(int onoff) { unsigned int gpio;
int err; if(onoff)
{
err = gpio_request(S5PV210_GPB(), "GPB");
if (err)
printk(KERN_ERR "#### failed to request GPB2 for CAM\n");
s3c_gpio_cfgpin(S5PV210_GPB(),S3C_GPIO_OUTPUT);
s3c_gpio_setpull(S5PV210_GPB(), S3C_GPIO_PULL_UP);
gpio_direction_output(S5PV210_GPB(), );
gpio_free(S5PV210_GPB()); //RESET
err = gpio_request(S5PV210_GPE1(), "GPE1");
if (err)
printk(KERN_ERR "#### failed to request GPE1_4 for CAM\n");
s3c_gpio_setpull(S5PV210_GPE1(), S3C_GPIO_PULL_NONE);
gpio_direction_output(S5PV210_GPE1(),);
mdelay();
gpio_direction_output(S5PV210_GPE1(), );
gpio_free(S5PV210_GPE1()); //PWDN CAM_back
err = gpio_request(S5PV210_GPB(), "GPB");
if (err)
printk(KERN_ERR "#### failed to request GPB4 for CAM\n");
s3c_gpio_cfgpin(S5PV210_GPB(),S3C_GPIO_OUTPUT);
s3c_gpio_setpull(S5PV210_GPB(), S3C_GPIO_PULL_UP);
gpio_direction_output(S5PV210_GPB(), );
mdelay();
gpio_direction_output(S5PV210_GPB(), );
gpio_free(S5PV210_GPB()); }
else
{
………………
}
return;
}
#endif
提供MCLK代码如下:
static int smdkv210_cam_clk_init(void)
{
unsigned int tempvalue=;
tempvalue = readl(S5P_CLK_DIV1);
tempvalue = (tempvalue &0xffff0fff);
writel(tempvalue,S5P_CLK_DIV1);
tempvalue = readl(S5P_CLK_SRC1);
tempvalue = (tempvalue &0xffff0fff)|0x00001000;
writel(tempvalue,S5P_CLK_SRC1); return ;
}
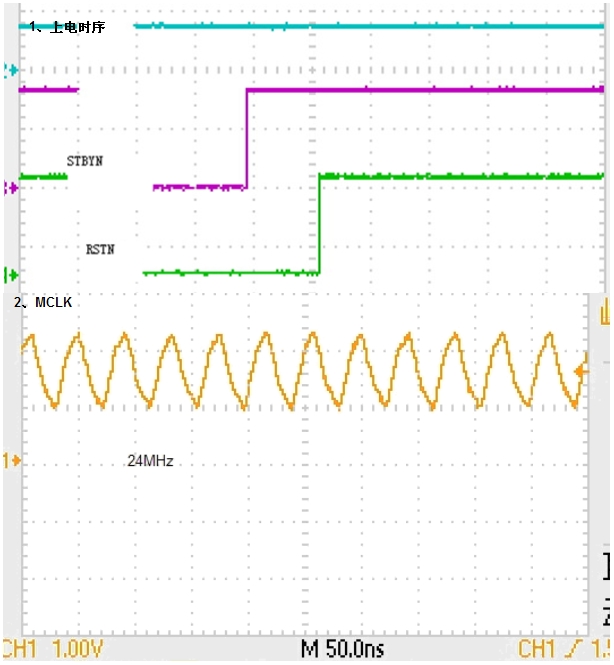
这时拿示波器抓到上电时的波形和MCLK24MHZ的时钟,信号就说明我们完成了这一步,其实在实际工作中,我们一般出问题的时候才会测这些数据,确认问题点。
上电时序:
(1)、上电时序;
(2)、MCLK如下所示。
2、 IIC和一些参数的配置
#ifdef CONFIG_VIDEO_GT2005
static struct GT2005_platform_data GT2005_plat = {
.default_width = ,
.default_height = ,
.pixelformat = V4L2_PIX_FMT_UYVY, // .freq = 24000000,
.is_mipi = ,
}; static struct i2c_board_info GT2005_i2c_info = {
I2C_BOARD_INFO("GT2005", 0x78 >> ), //1、IIC地址
.platform_data = >2005_plat,
}; static struct s3c_platform_camera GT2005 = {
#ifdef CAM_ITU_CH_A
.id = CAMERA_PAR_A,
#else
.id = CAMERA_PAR_B,
#endif
.type = CAM_TYPE_ITU, //2、数据接口选择(ITU\MIPI等)
.fmt = ITU_601_YCBCR422_8BIT,
.order422 = CAM_ORDER422_8BIT_CBYCRY, //3、图像数据格式 .i2c_busnum = ,
.info = >2005_i2c_info,
.pixelformat = V4L2_PIX_FMT_UYVY,
.srclk_name = "mout_mpll", //4、这部分关系到时钟
.clk_name = "sclk_cam1",
.clk_rate = , /* 24MHz */
.line_length = , /* 640*480 */
/* default resol for preview kind of thing */
.width = ,
.height = ,
.window = {
.left = ,
.top = ,
.width = ( - ),
.height = ,
}, /* Polarity */ //5、信号的极性, .inv_pclk = 0,
.inv_vsync = ,
.inv_href = ,
.inv_hsync = , .initialized = ,
.cam_power=set_cam2005_main_power
};
#endif
注意下面几个参数:
(1)、IIC地址
(2)、数据接口选择(ITU\MIPI等),这几个数据接口我们在前面提到过;
(3)、图像数据格式 ,这就是我们前面提到的YVU\UVY之类不同的数据顺序;
(4)、这部分关系到时钟;
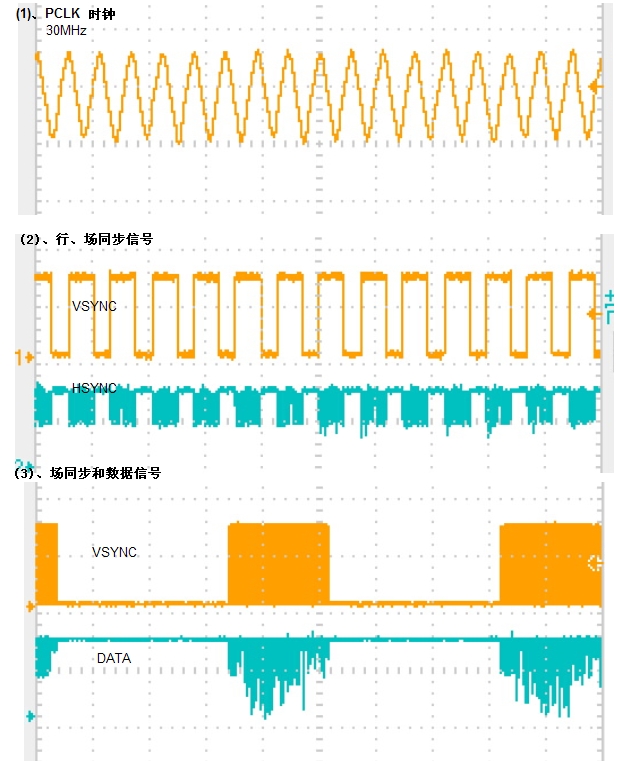
(5)、输出信号的极性,就是我们PCLK、VSYNC、HSVNC这些信号的极性,不正确时会没有图像之类现象,这个也要注意了。
完成这一步确认IIC通信是否正常,如下图所抓到波形:

3、 完成上面两步,摄像头基本配置完成,我们确认下输出端PCLK、VHSN、SVSN、D1-D7
二、摄像头调试过程中常遇到的问题
1、录相在预览时正常,播放录像时花屏(程序解释为三星s5pv210/s5pv310是的,其它的可以参考,找相应代码)

原因分析:
(1)录相用fimc2,
在android/device/samsung/proprietary/libcamera/SecCamera.cpp中
int SecCamera::startRecord(void)
m_cam_fd_rec = open(CAMERA_DEV_NAME2, O_RDWR); vendor\sec\sec_proprietary\smdkc110\libcamera\SecCamera.h
#define CAMERA_DEV_NAME2 "/dev/video2"
(2)所用的视频格式,在
android/device/samsung/proprietary/libcamera/SecCameraHWInterface.cpp中
void CameraHardwareSec::m_initDefaultParameters(int camera_id)
int default_preview_pixel_format = mSecCamera->getPreviewDefaultPixelFormat();
switch (default_preview_pixel_format) {
default:
case V4L2_PIX_FMT_NV21:
p.setPreviewFormat(CameraParameters::PIXEL_FORMAT_YUV420SP);
break;
case V4L2_PIX_FMT_NV12T:
p.setPreviewFormat("yuv420sp_tiled");
break;
} 其中mSecCamera->getPreviewDefaultPixelFormat()在
vendor\sec\sec_proprietary\smdkc110\libcamera\SecCamera.cpp中实现,
int SecCamera::getPreviewDefaultPixelFormat(void)
{
return DEFAULT_PREVIEW_PIXEL_FORMAT;
}
在android/device/samsung/proprietary/libcamera/SecCamera.h中设定初始值。我们这里设的是
#ifdef DUAL_PORT_RECORDING
#define DEFAULT_PREVIEW_PIXEL_FORMAT (V4L2_PIX_FMT_NV21)
#else
#define DEFAULT_PREVIEW_PIXEL_FORMAT (V4L2_PIX_FMT_NV12T)
#endif
以上得出视频格式为V4L2_PIX_FMT_NV21。
2、图像干扰问题,如下图所示

原因可能是:
(1)、摄像头模组有问题,换一个摄像头试一下;
(2)、数据线驱动能力不足,这个可以在摄像头寄存器里面改,问下摄像头模组FAE,看改那些地方;
(3)、两个摄像头共用数据线时,不工作的摄像头会把工作的数据信号减弱;
(4)、PCB 走线太长,也会有干扰,不过我觉得这个可能性小,调试好就一款这样的的,模组厂FAE说的,不过他们模组本身也有问题,两方面因素都有吧:PCB(线过长)、模组打样也有问题。
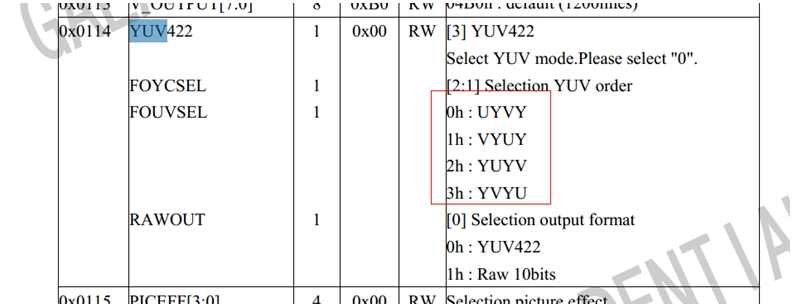
3、YUV顺序不对:
yuv顺序不对时,出现如下现象。

看下摄像头规格书,把相应寄存器的值改一下就可以了。如下以红框里是不同yuv顺序,找到改为相应的。
4、 预览方向不对(摄像头寄存器只能改以 180度为基数的,90度的就要在FIMC中改)
想知道和比较明确说明翻转角度,最常用的就是写一个“F”,然后看预览里的是怎么转的。
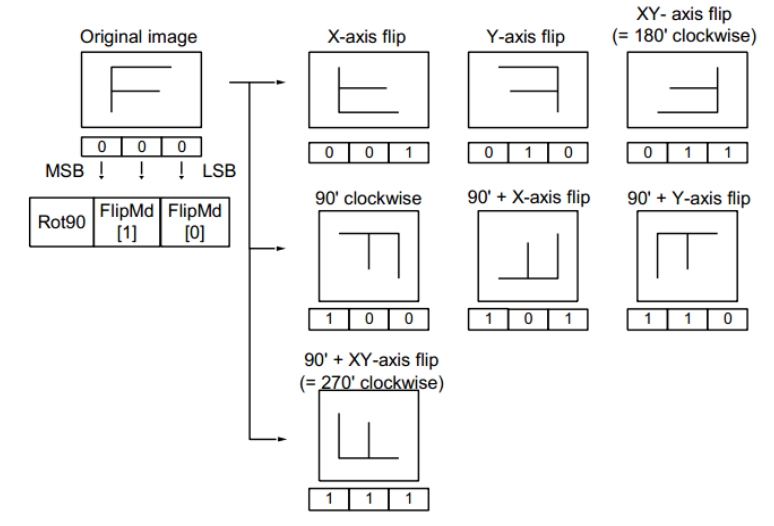
上面有90度的翻转,因为这是FIMC中的寄存器,一般不会改这一部分的值。要不就在模组寄存器中改,要不就在上层。上面只是说明如何去确认图像翻转。
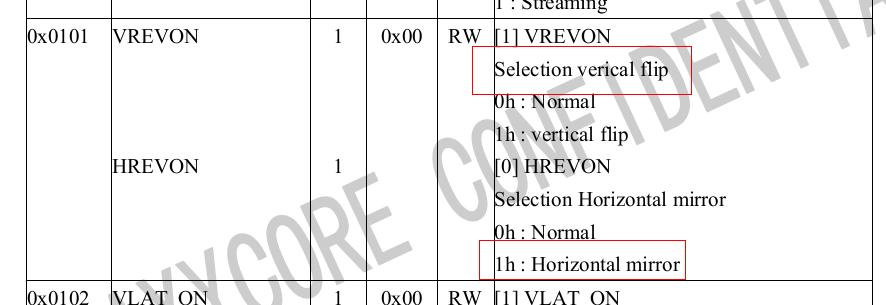
看下GT2005关于翻转的寄存器吧:
5、 杂光,鬼影:
其行业的专业术语统称为Flare,是指在拍摄光源或者强光物体时,边缘出现光影或出现一个完整物体的影子,而且这种现象只能减轻不能完全消失,原因是由于镜片的材质导致光线不但存在折射还存在反射,整机由于镜头面到保护镜片距离很大会更明显!

6、 常见问题相关
摄像头效果评测都有哪些?

以上以gt2005为例,说了一下摄像头驱动,和驱动中常见到的问题,如果上面的问题解决,摄像头点亮,说明在平台是运行是没问题的,小的问题和细节,要找模组厂的FAE过来协助解决,不过你想多研究一下的话,也可以,如果项目允许,就多看看,做到调试一个驱动,所有问题都了解,这样对工作经验、积累很重要的,希望对大家有用。
【转】android camera(四):camera 驱动 GT2005的更多相关文章
- android从应用到驱动之—camera(2)---cameraHAL的实现
本文是camera系列博客,上一篇是: android从应用到驱动之-camera(1)---程序调用流程 本来想用这一篇博客把cameraHAL的实现和流程都给写完的.搞了半天,东西实在是太多了.这 ...
- android从应用到驱动之—camera(1)---程序调用流程
一.开篇 写博客还得写开篇介绍,可惜,这个不是我所擅长的.就按我自己的想法写吧. 话说camera模块,从上层到底层一共包含着这么几个部分: 1.apk------java语言 2.camera的ja ...
- android从应用到驱动之—camera(1)---程序调用流程[转]
一.开篇 写博客还得写开篇介绍,可惜,这个不是我所擅长的.就按我自己的想法写吧. 话说camera模块,从上层到底层一共包含着这么几个部分: 1.apk------java语言 2.camera的ja ...
- (转)android从应用到驱动之—camera(1)---程序调用流程
一.开篇 写博客还得写开篇介绍,可惜,这个不是我所擅长的.就按我自己的想法写吧. 话说camera模块,从上层到底层一共包含着这么几个部分: 1.apk------java语言 2.camera的ja ...
- android从应用到驱动之—camera(2)---cameraHAL的实现
本来想用这一篇博客把cameraHAL的实现和流程都给写完的.搞了半天,东西实在是太多了.这篇先写cameraHAL的基本实现框架,下一篇在具体写camerahal的流程吧. cameraHAL的实现 ...
- sc7731 Android 5.1 Camera 学习之一Camera 两个对象
众所周知,在Android中Camera采用了C/S架构,其中Camera server 与 Camera client之间通过Android Binder IPC机制进行通信.在Camera实现的框 ...
- Android 5.1 Camera 架构学习之Camera初始化
Android Camera 采用C/S架构,client 与server两个独立的线程之间(CameraService)使用Binder通信. 一 CameraService的注册. 1.手机开机后 ...
- Android中利用Camera与Matrix实现3D效果详解
本文行文目录: 一.Camera与Matrix初步认识 二.Camera与Matrix旋转效果拆分介绍 三.Camera与Matrix实现立体3D切换效果 [csdn地址:http://blog.cs ...
- MTK Android Driver :Camera
MTK Android Driver :camera 1.相关代码位置:mediatek\config\XXXX(红色字为具体的项目名) 文件:ProjectConfig.mk CUSTOM_KERN ...
随机推荐
- 游标的使用实例(Sqlserver版本)
游标,如果是之前给我说这个概念,我的脑子有二个想法:1.你牛:2.我不会 不会不是理由,更不是借口,于是便要学习,本人属性喜欢看代码,不喜欢看书的人,所以嘛,文字对我没有吸引力:闲话少说啊,给大家提供 ...
- Unity 异步加载场景
效果图如下: 今天一直在纠结如何加载场景,中间有加载画面和加载完毕的效果动画! A 场景到 B , 看见网上的做法都是 A –> C –> B. C场景主要用于异步加载B 和 播放一些 ...
- Android控件TextView的实现原理分析
文章转载至CSDN社区罗升阳的安卓之旅,原文地址:http://blog.csdn.net/luoshengyang/article/details/8636153 在前面一个系列的文章中,我们以窗口 ...
- 89c52串口发送接收小示例
//串口发送 void sendChar(char *p)//调用前关中断,调用完成后关中断 { while(*p != '\0') { SBUF = *P while(!TI); TI = 0; p ...
- [HeadFirst-HTMLCSS学习笔记][第十四章交互活动]
表单 <form action="http://wickedlysmart.com/hfhtmlcss/contest.php" method="POST" ...
- 如何用浏览器调试js代码
按F12打开调试工具
- IOS 中关于自定义Cell 上的按钮 开关等点击事件的实现方法(代理)
1.在自定义的Cell .h文件中写出代理,写出代理方法. @protocol selectButtonDelegate <NSObject> -(void)selectModelID:( ...
- 浅析Struts1和Struts2的Action线程安全问题
tomcat容器对servlet的实现采用的是单例模式,对于一个servlet类,永远只有一个servlet对象存在. 下面我们来解释为什么Struts1是线程不安全的. 1.Struts1 Stru ...
- [poj2449]Remmarguts' Date(spfa+A*)
转载请注明出处: http://www.cnblogs.com/fraud/ ——by fraud Remmarguts' Date Time Limit: 4000MS Mem ...
- 典型的DIV CSS三行二列居中高度自适应布局
如何使整个页面内容居中,如何使高度适应内容自动伸缩.这是学习CSS布局最常见的问题.下面就给出一个实际的例子,并详细解释.(本文的经验和是蓝色理想论坛xpoint.guoshuang共同讨论得出的.) ...