如何利用小熊派获取MPU6050六轴原始数据
摘要:使用小熊派开发板,通过硬件IIC与MPU6050六轴传感器模块通信,完成相应寄存器配置,成功获取陀螺仪、加速度计数据。
本问主要讲述使用小熊派开发板+MPU6050六轴传感器,获取加速度计以及陀螺仪信息。
一、实验准备
1.实验环境
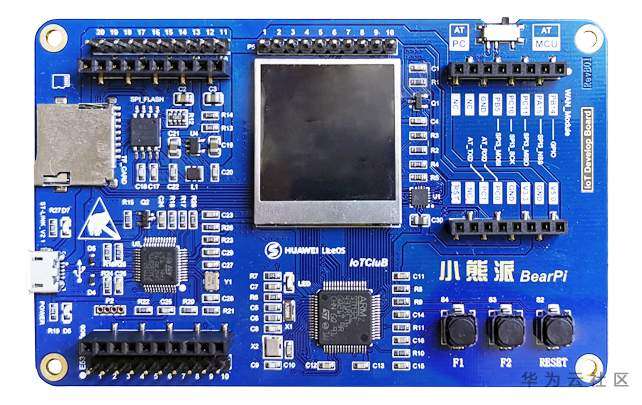
- 一块stm32开发板(推荐使用小熊派),以及数据线
- 已经安装STM32CubeMX
- 已经安装KeilMDK,并导入stm32开发板对应的芯片包(小熊派使用的是STM32L431RCT6)
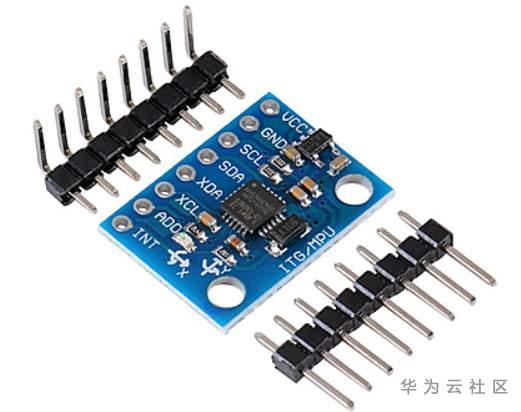
- 一个MPU6050模块(IIC接口)以及杜邦线
2.目标效果
- 通过CubeMX创建工程并配置参数
- IIC方式通信,配置MPU6050寄存器
- 小熊派通过IIC,获取陀螺仪、加速度计数据
- 串口1重定向输出编码器转动的角度、角速度
二、通过CubeMX生产MDK工程
A.芯片选择
- 打开CubeMX,进入芯片选择:
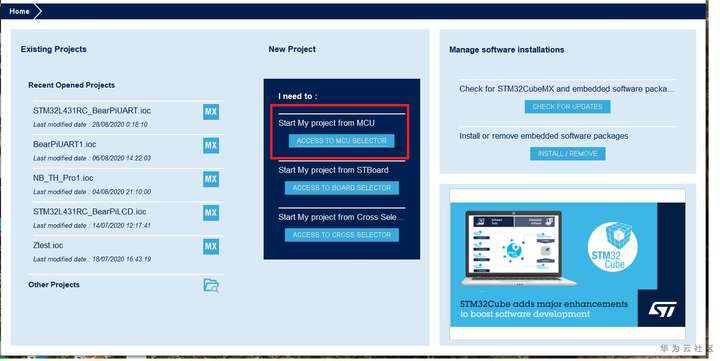
- 选择自己的stm32芯片(即STM32L431RCT6):

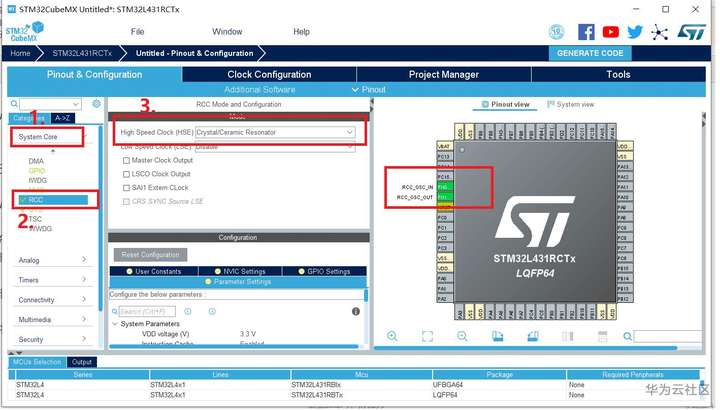
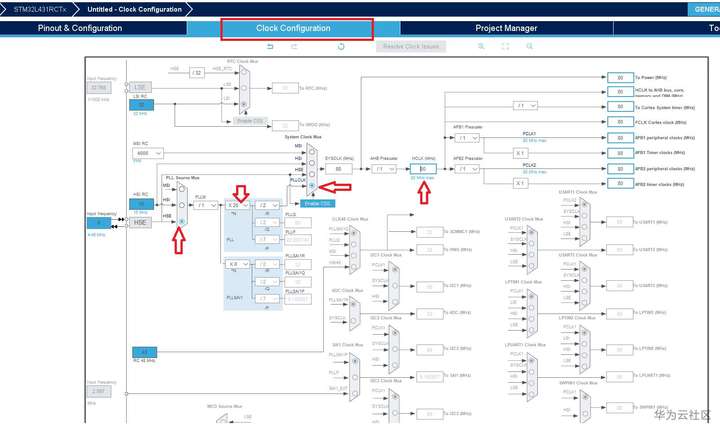
B.时钟源RCC设置
- 更改系统时钟源
系统时钟默认使用内部的高速时钟(HSI),选择使用HSE,时钟更精确
- 设置外部时钟对应的端口
- 配置时钟树
STM32L431RCT6系统时钟最大可以为80MHz,我们配置到最大即可
C.参数配置(对应端口设置)
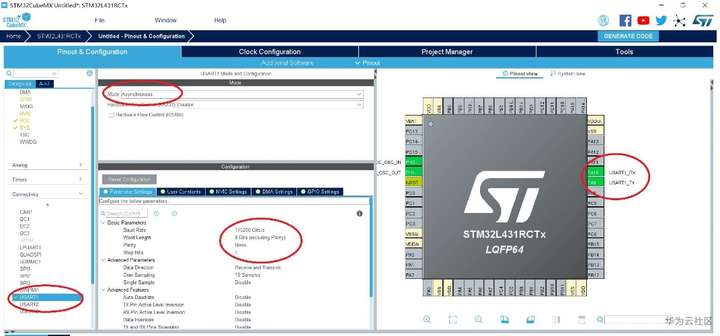
1)配置USART1
使用USART,模式为异步,波特率为115200,无硬件流控制
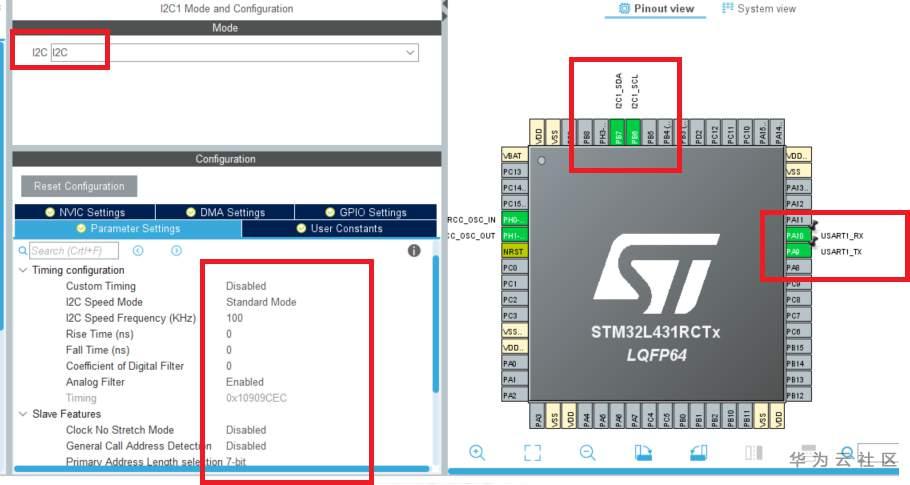
2)硬件IIC配置
IIC(Inter-Integrated Circuit)其实是IICBus简称,所以中文应该叫集成电路总线,它是一种串行通信总线,使用多主从架构
我们使用小熊派的I2C1,小熊派引出的引脚为PB7->I2C1_SDA,PB6->I2C1_SCL
其他选项我们保持默认即可
3)MPU6050模块
当然,我们还需要了解MPU6050模块的电路,更好的进行配置。当然我们也可以自主制作模块
如果AD0脚(9脚)接地,IIC地址为0X68(不包含最低位);如果AD0脚接V3.3,则IIC地址为0X69(不包含最低位).
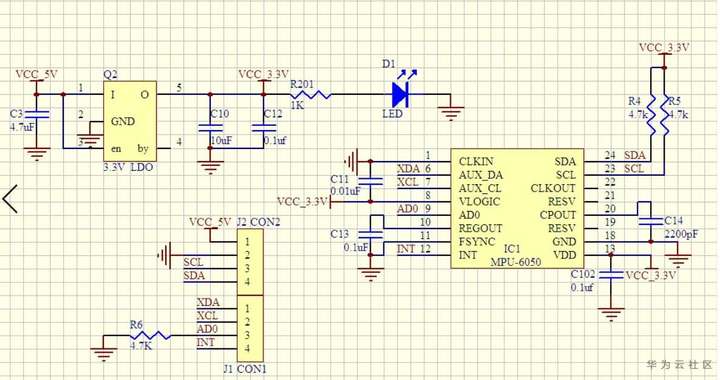
可以看到,AD0引脚已经被拉低,所有默认IIC地址为0x68.
最后,生成代码就OK了
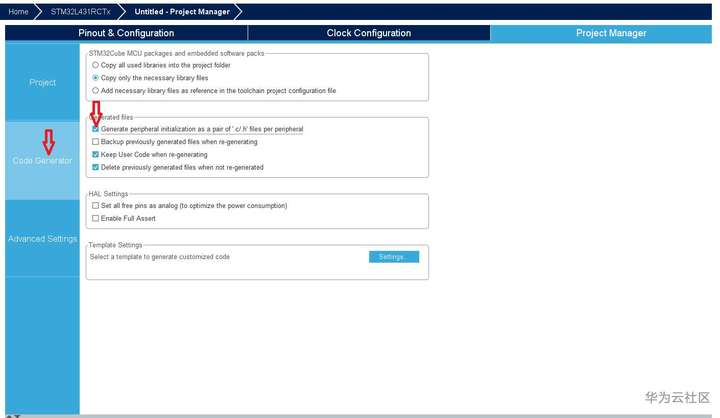
D.工程设置
一些基础的设置,包括工程名、存储位置、工程环境、工程中各个文件的组成

E.生成代码

三、编写相应代码
1. 串口1输出重定向
我们知道printf是打印函数,原理是根据传入的字符串参数格式化打印输出到stdout中。我们需要让printf打印到串口之中,只需要在usart.c文件中模仿printf写一个输出函数即可
- 在添加头文件
/* USER CODE BEGIN 0 */#include <stdarg.h>#include <string.h>#include <stdio.h>/* USER CODE END 0 */
- 写输出函数
/* USER CODE BEGIN 1 */void UsartPrintf(UART_HandleTypeDef *huart, char *fmt,...){
unsigned char UsartPrintfBuf[296];
va_list ap;
unsigned char *pStr = UsartPrintfBuf;
va_start(ap, fmt);
vsprintf((char *)UsartPrintfBuf, fmt, ap); //格式化
va_end(ap);
while(*pStr != 0)
{
USART1->TDR = *pStr++;
while((USART1->ISR & 0x40) == 0);
}}//注意:在usart.h中添加void UsartPrintf(UART_HandleTypeDef *huart, char *fmt,...);//使用方法:UsartPrintf(&huart1;,"hello world\r\n");/* USER CODE END 1 */
注意:自己添加的代码,需要在begin和end之间
2.写MPU6050驱动
我们创建两个文件,分别是mpu6050.h和mpu6050.c
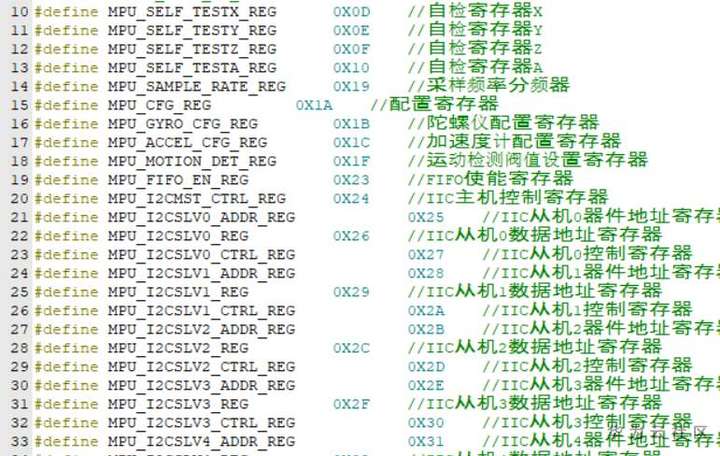
a).首先我们在mpu6050.h中宏定义相应的寄存器,方便后续使用。
在main函数中,我们首先设置计数器初值为10000,然后打开编码器,每1S获取一次计数器的更新值,判断编码器信息
因为寄存器实在太多,就没有一一列出,可以在附件中查看哦~
b).配置各个寄存器
主要的函数为:IIC读写、初始化MPU6050、设置陀螺仪和加速度计满量程、设置采样率、读取数据
代码附件中有,不一一讲解。
初始化函数
uint8_t MPUInit(void){
uint8_t res;
extern I2C_HandleTypeDef hi2c1;
HAL_I2C_Init(&hi2c1;); //初始化IIC
/*上电后最好有一定延时,保证数据准确*/
HAL_Delay(500);
MPU_Write_Byte(MPU_PWR_MGMT1_REG,0x80); //复位MPU6050,写入1000 0000
MPU_Write_Byte(MPU_PWR_MGMT1_REG,0x00);//sleep写入0,保持唤醒状态
MPU_Set_Gyro_Fsr(3); //陀螺仪满量程±2000
MPU_Set_Accel_Fsr(0); //加速度计满量程±2g
MPU_Set_Rate(50); //设置采样率=50Hz
MPU_Write_Byte(MPU_INT_EN_REG,0x00);//关闭所有中断
MPU_Write_Byte(MPU_USER_CTRL_REG,0x00); //关闭从iic
MPU_Write_Byte(MPU_FIFO_EN_REG,0x00); //关闭FIFO
MPU_Write_Byte(MPU_INTBP_CFG_REG,0x80); //INT引脚低电平有效
res = MPU_Read_Byte(MPU_DEVICE_ID_REG); //读取地址
UsartPrintf(&huart1;,"\r\nMPU6050:0x%2x\r\n",res);
UsartPrintf(&huart1;,"\r\nMPU6050:0x%2x\r\n",MPU_ADDR);
if(res == MPU_ADDR) //判断地址是否正确
{
MPU_Write_Byte(MPU_PWR_MGMT1_REG,0x01); //001,pll,x轴为参考系统时钟源
MPU_Write_Byte(MPU_PWR_MGMT2_REG,0x00); //都不使用待机模式
MPU_Set_Rate(50);
}else return 1;
return 0;}
需要注意到,mpu6050上电后需要有一定延时,保证数据的稳定。重启mpu6050会有睡眠模式,写入关闭睡眠。最后检测并判断IIC地址是否正确
3.main函数
/* USER CODE BEGIN PV */short x;short y;short z;/* USER CODE END PV */
/* USER CODE BEGIN 2 */
MPUInit();
/* USER CODE END 2 */ /* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
while(MPU_Get_Gyroscope(&x,&y,&z) !=0);
HAL_Delay(1000);
printf("\r\n陀螺仪:x=-,y=-,z=-\r\n",x,y,z);
while(MPU_Get_Accelerometer(&x,&y,&z) != 0);
HAL_Delay(1000);
printf("\r\n加速度计:x=-,y=-,z=-\r\n",x,y,z);
/* USER CODE BEGIN 3 */
}
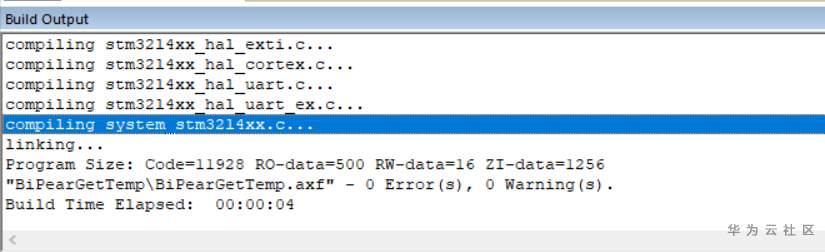
四、编译+下载
点击编译后,0 error,0 warning
小熊派连接在电脑上,代码下载到开发板

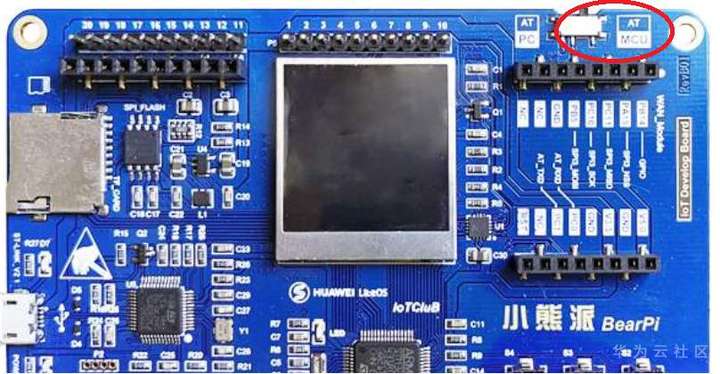
五、连接硬件
1.将小熊派串口1和电脑相连,即拨到 AT-MUC,按下复位键
2.连接MPU6050
我们只需要使用mpu6050的SDA\SCL\GND\VCC。
即:
- SDA-->PB7
- SCL-->PB6
- GND-->GND
- VCC-->5V
3.效果
打开串口调试助手,我们手动转动开发板(包括模块),看见陀螺仪和加速度数据不断变化,当静止时数据保持稳定 。
至此,我们已经可以通过小熊派以IIC获取六轴传感器原始数据信息
本文分享自华为云社区《小熊派实践——获取MPU6050六轴原始数据》,原文作者:ttking 。
如何利用小熊派获取MPU6050六轴原始数据的更多相关文章
- 实践案例丨利用小熊派开发板获取土壤湿度传感器的ADC值
摘要:一文带你用小熊派开发板动手做土壤湿度传感器. 一.实验准备 1.实验环境 一块stm32开发板(推荐使用小熊派),以及数据线 已经安装STM32CubeMX 已经安装KeilMDK,并导入stm ...
- Simulink S-Function的使用(以串口接收MPU6050六轴陀螺仪参数为实例)
S-Function 允许使用自定义C/C++函数作为传递函数,具有可移植性.也可以同样利用MATLAB函数进行相同的运算,看开发者熟悉程度而定. 项目流程 由系统串口接收数据包. 通过S-Funct ...
- STM32—驱动六轴MPU6050输出欧拉角
文章目录 一.MPU6050介绍 1.MPU6050与陀螺仪.加速度计的关系: 2.整体概括 3.引脚说明 4.基本配置及相关寄存器 电源管理寄存器1 陀螺仪配置寄存器 加速度计配置寄存器 FIFO使 ...
- 【.NET 与树莓派】六轴飞控传感器(MPU 6050)
所谓"飞控",其实是重力加速度计和陀螺仪的组合,因为多用于控制飞行器的平衡(无人机.遥控飞机).有同学会问,这货为什么会有六轴呢?咱们常见的不是X.Y.Z三轴吗?重力加速度有三轴, ...
- STC8H开发(七): I2C驱动MPU6050三轴加速度+三轴角速度检测模块
目录 STC8H开发(一): 在Keil5中配置和使用FwLib_STC8封装库(图文详解) STC8H开发(二): 在Linux VSCode中配置和使用FwLib_STC8封装库(图文详解) ST ...
- 手把手教你丨小熊派移植华为 LiteOS-M
摘要:本文详细讲解如何移植 LiteOS 到小熊派. 本文分享自华为云社区<小熊派移植华为 LiteOS-M(基于MDK)>,作者: JeckXu666. 前言 之前使用小熊派实现了鸿蒙动 ...
- 微信小程序把玩(六)模块化
原文:微信小程序把玩(六)模块化 模块化也就是将一些通用的东西抽出来放到一个文件中,通过module.exports去暴露接口.我们在最初新建项目时就有个util.js文件就是被模块化处理时间的 /* ...
- 支付宝小程序获取 user_id(openid) ThinkPHP版
支付宝小程序获取 user_id(openid) ThinkPHP版 近期支付宝小程序个人公测了,就想着玩一下,没想到就获取用户唯一标识都这么麻烦,微信的openid的话Get请求一下就完事了,支付宝 ...
- iOS之 利用通知(NSNotificationCenter)获取键盘的高度,以及显示和隐藏键盘时修改界面的注意事项
我们在开发中会遇到这样的情况:调用键盘时需要界面有一个调整,避免键盘遮掩输入框. 但实现时你会发现,在不同的手机上键盘的高度是不同的.这里列举一下: //获取键盘的高度 /* iphone 6: 中文 ...
随机推荐
- 【Kata Daily 190904】Calculating with Functions(函数计算)
原题: This time we want to write calculations using functions and get the results. Let's have a look a ...
- css 背景图片自适应分辨率大小 兼容
拉伸,all浏览器兼容.bg{ background:url(http://wyz.67ge.com/wp-content/uploads/qzlogo.jpg); filter:&q ...
- c#视频位置
static void Main(string[] args) { string scoure = @"C:\Documents and Settings\Administra ...
- markdown语法入门笔记
Markdown 是一种轻量级标记语言 1.标题 # ## ... ###### 分别为1到6级标题 (#后要加空格) 7个以上的#的没有效果 阿萨德阿萨德 阿萨德 2.字体 *斜体文本* _斜体文本 ...
- Netlink 内核实现分析 1
Netlink 是一种IPC(Inter Process Commumicate)机制,它是一种用于内核与用户空间通信的机制,在一般情况下,用户态和内核态通信会使用传统的Ioctl.sysfs属性文件 ...
- IIC、SPI、UART协议总结
IIC 特点 1.Inter-Integrated Circuit,内部集成总线,半双工 2.短距离传输,有应答,速度较慢 3.SDA双向数据线,SCL时钟线 4.可以挂载多个设备,IIC设备有固化地 ...
- rbd的image快照与Pool快照
前言 这个问题是不久前在ceph社区群里看到的,创建image的时候,当时的报错如下: 2016-12-13 23:13:10.266865 7efbfb7fe700 -1 librbd::image ...
- EDI在服装行业的应用
EDI发展迅速,从最初应用于汽车.物流.零售等行业开始,应用范围不断扩大.当下金融行业.服装行业也加入到使用EDI进行数据传输的队伍中.本文主要介绍服装行业通过EDI系统实现业务数据收发,本次EDI项 ...
- OMV openmediavault NAS系统命令显示颜色
闲鱼65f元买的我家云刷了OMV系统. 但ls命令查看文件不显示颜色. cd /etc/进入配置文件目录查看并没有bashrc文件,但有个bash.bashrc 在 bash.bashrc后面加入以下 ...
- 应届生应聘阿里,腾讯,美团90%会被问到的Netty面试题!史上最全系列!
1.BIO.NIO 和 AIO 的区别? BIO:一个连接一个线程,客户端有连接请求时服务器端就需要启动一个线程进行处理.线程开销大.伪异步 IO:将请求连接放入线程池,一对多,但线程还是很宝贵的资源 ...