ROS2学习之旅(14)——编写简单的发布者和订阅者(C++)
节点是通过ROS Graph进行通信的可执行进程。在本文中,节点将通过话题以字符串消息的形式相互传递信息。这里使用的例子是一个简单的"talker"和“listener”系统,一个节点发布数据,另一个节点订阅话题,以便接收该数据。
这些示例中使用的代码可以在这里找到。
1.创建一个功能
在上一节的基础上,即拥有dev_ws功能包的前提下,执行以下命令:
cd dev_ws/src
ros2 pkg create --build-type ament_cmake cpp_pubsub
终端将返回一条消息,验证cpp_pubsub包及其所有必要的文件和文件夹的创建。
导航到dev_ws/src/cpp_pubsub/src中,这就是包含可执行文件的源文件所在的目录。
2.编写一个发布节点
首先,通过以下命令下载示例talker代码(在src目录下):
wget -O publisher_member_function.cpp https://raw.githubusercontent.com/ros2/examples/foxy/rclcpp/topics/minimal_publisher/member_function.cpp
打开刚刚下载的文件publisher_member_function.cpp:
#include <chrono>
#include <memory>
#include "rclcpp/rclcpp.hpp"
#include "std_msgs/msg/string.hpp"
using namespace std::chrono_literals;
/* This example creates a subclass of Node and uses std::bind() to register a
* member function as a callback from the timer. */
class MinimalPublisher : public rclcpp::Node
{
public:
MinimalPublisher()
: Node("minimal_publisher"), count_(0)
{
publisher_ = this->create_publisher<std_msgs::msg::String>("topic", 10);
timer_ = this->create_wall_timer(
500ms, std::bind(&MinimalPublisher::timer_callback, this));
}
private:
void timer_callback()
{
auto message = std_msgs::msg::String();
message.data = "Hello, world! " + std::to_string(count_++);
RCLCPP_INFO(this->get_logger(), "Publishing: '%s'", message.data.c_str());
publisher_->publish(message);
}
rclcpp::TimerBase::SharedPtr timer_;
rclcpp::Publisher<std_msgs::msg::String>::SharedPtr publisher_;
size_t count_;
};
int main(int argc, char * argv[])
{
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared<MinimalPublisher>());
rclcpp::shutdown();
return 0;
}
2.1审阅代码
代码的顶部为程序所需要的C++头文件,在头文件之后是rclcpp/rclcpp.hpp,它包含了ROS2系统中最常见的部分,最后一是std_msgs/msg/string.hpp,它包含了用于发布数据的内置消息类型。
这些代码行表示了节点的依赖关系:
#include <chrono>
#include <memory>
#include "rclcpp/rclcpp.hpp"
#include "std_msgs/msg/string.hpp"
using namespace std::chrono_literals;
下一行通过继承rclcpp:: node来创建节点类MinimalPublisher。代码中的每个this都指向该节点。
class MinimalPublisher : public rclcpp::Node
公共构造函数将节点命名为minimal_publisher,并将coun_初始化为0。在构造函数内部,使用String消息类型、话题名称topic,并且限制消息队列的大小来初始化发布者。接下来,初始化timer_,这将导致timer_callback函数每秒执行两次。
public:
MinimalPublisher()
: Node("minimal_publisher"), count_(0)
{
publisher_ = this->create_publisher<std_msgs::msg::String>("topic", 10);
timer_ = this->create_wall_timer(
500ms, std::bind(&MinimalPublisher::timer_callback, this));
}
timer_callback函数是设置消息数据和实际发布消息的地方。RCLCPP_INFO宏确保将每个发布的消息打印到控制台:
private:
void timer_callback()
{
auto message = std_msgs::msg::String();
message.data = "Hello, world! " + std::to_string(count_++);
RCLCPP_INFO(this->get_logger(), "Publishing: '%s'", message.data.c_str());
publisher_->publish(message);
}
最后是定时器(timer)、发布器(publisher)和计数器(counter)字段的声明:
rclcpp::TimerBase::SharedPtr timer_;
rclcpp::Publisher<std_msgs::msg::String>::SharedPtr publisher_;
size_t count_;
在MinimalPublisher类之后是main,其中节点实际执行的位置。rclcpp::init初始化ROS 2, rclcpp::spin开始处理节点的数据,包括定时器的回调。
int main(int argc, char * argv[])
{
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared<MinimalPublisher>());
rclcpp::shutdown();
return 0;
}
2.2添加依赖
返回到dev_ws/src/cpp_pubsub目录,其中已经包含CMakeLists.txt和package.xml文件。
打开package.xml文件,确保<description>, <maintainer> and <license> 这些标签填写完毕:
<description>Examples of minimal publisher/subscriber using rclcpp</description>
<maintainer email="you@email.com">Your Name</maintainer>
<license>Apache License 2.0</license>
在ament_cmake构建工具依赖项后添加一行,并粘贴以下依赖项对应于节点的include语句:
<depend>rclcpp</depend>
<depend>std_msgs</depend>
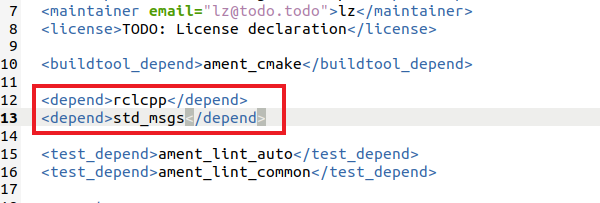
这表明了程序执行是需要依赖rclcpp和std_msgs。
不要忘记保存文件。
2.3CMakeLists.txt
打开CMakeLists.txt文件,在现有的依赖项find_package(ament_cmake REQUIRED)下面,添加以下行:
find_package(rclcpp REQUIRED)
find_package(std_msgs REQUIRED)
然后,添加可执行文件并将其命名为talker,这样就可以使用ros2 run节点了:
add_executable(talker src/publisher_member_function.cpp)
ament_target_dependencies(talker rclcpp std_msgs)
最后,添加install(TARGETS…)部分,让ros2 run可以找到可执行文件:
install(TARGETS
talker
DESTINATION lib/${PROJECT_NAME})
删除一些不必要的注释来清理CMakeLists.txt:
cmake_minimum_required(VERSION 3.5)
project(cpp_pubsub)
# Default to C++14
if(NOT CMAKE_CXX_STANDARD)
set(CMAKE_CXX_STANDARD 14)
endif()
if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")
add_compile_options(-Wall -Wextra -Wpedantic)
endif()
find_package(ament_cmake REQUIRED)
find_package(rclcpp REQUIRED)
find_package(std_msgs REQUIRED)
add_executable(talker src/publisher_member_function.cpp)
ament_target_dependencies(talker rclcpp std_msgs)
install(TARGETS
talker
DESTINATION lib/${PROJECT_NAME})
ament_package()
现在可以编译包,生成本地设置文件并运行它(不要忘记设置环境变量,否则提示包不存在):
ros2 run cpp_pubsub talker
3.编写订阅者节点
回到dev_ws/src/cpp_pubsub/src来创建订阅者节点,在终端输入:
wget -O subscriber_member_function.cpp https://raw.githubusercontent.com/ros2/examples/foxy/rclcpp/topics/minimal_subscriber/member_function.cpp
在终端输入ls,此时返回:
publisher_member_function.cpp subscriber_member_function.cpp
打开subscriber_member_function.cpp文件:
#include <memory>
#include "rclcpp/rclcpp.hpp"
#include "std_msgs/msg/string.hpp"
using std::placeholders::_1;
class MinimalSubscriber : public rclcpp::Node
{
public:
MinimalSubscriber()
: Node("minimal_subscriber")
{
subscription_ = this->create_subscription<std_msgs::msg::String>(
"topic", 10, std::bind(&MinimalSubscriber::topic_callback, this, _1));
}
private:
void topic_callback(const std_msgs::msg::String::SharedPtr msg) const
{
RCLCPP_INFO(this->get_logger(), "I heard: '%s'", msg->data.c_str());
}
rclcpp::Subscription<std_msgs::msg::String>::SharedPtr subscription_;
};
int main(int argc, char * argv[])
{
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared<MinimalSubscriber>());
rclcpp::shutdown();
return 0;
}
3.1审阅代码
订阅者节点的代码与发布者的代码几乎相同。现在该节点被命名为minimal_subscriber,构造函数使用该节点的create_subscription类来执行回调。
订阅者没有计时器,因为订阅者只是在数据被发布到topic时进行响应。
public:
MinimalSubscriber()
: Node("minimal_subscriber")
{
subscription_ = this->create_subscription<std_msgs::msg::String>(
"topic", 10, std::bind(&MinimalSubscriber::topic_callback, this, _1));
}
发布者和订阅者使用的话题名称和消息类型必须匹配,才能进行通信。
topic_callback函数接收通过话题发布的字符串消息数据,并使用RCLCPP_INFO宏将其写入控制台。
该类中唯一的字段声明是subscription_。
private:
void topic_callback(const std_msgs::msg::String::SharedPtr msg) const
{
RCLCPP_INFO(this->get_logger(), "I heard: '%s'", msg->data.c_str());
}
rclcpp::Subscription<std_msgs::msg::String>::SharedPtr subscription_;
main函数完全相同,只是现在它启动MinimalSubscriber节点。对于发布者节点,spin意味着启动计时器,但对于订阅者,它仅仅意味着准备在消息到来时接收它们。
由于此节点与发布者节点具有相同的依赖关系,因此无需向package.xml添加任何新内容。
3.2CMakeLists.txt
重新打开CMakeLists.txt,并在发布者条目下面添加订阅者节点的可执行文件:
add_executable(listener src/subscriber_member_function.cpp)
ament_target_dependencies(listener rclcpp std_msgs)
install(TARGETS
talker
listener
DESTINATION lib/${PROJECT_NAME})
保存文件。
4.编译和运行
可以使用如下命令解决依赖问题:
rosdep install -i --from-path src --rosdistro foxy -y
接下来在工作空间中编译新包:
colcon build --packages-select cpp_pubsub
打开一个新终端,source设置文件:
. install/setup.bash
现在运行tlaker节点:
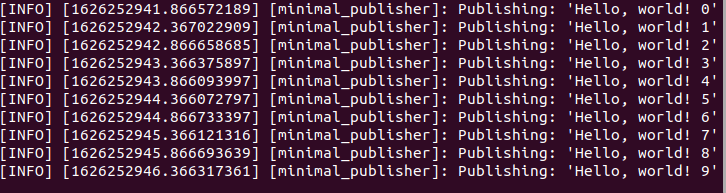
ros2 run cpp_pubsub talker
终端应该每0.5秒发布一次信息消息,像这样:
打开另一个终端,再次从dev_ws设置setup文件,然后启动listener节点:
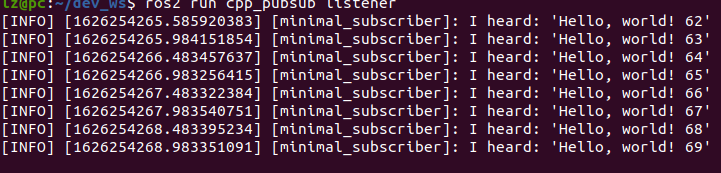
ros2 run cpp_pubsub listener
listener将开始向控制台打印消息,从当时打开的消息计数开始,如下所示:
在每个终端中输入Ctrl+C,停止节点运行。
5.总结
本文创建了两个节点来发布和订阅话题上的数据。在编译和运行它们之前,需要将它们的依赖项和可执行文件添加到包配置文件中。
如果给您带来帮助,希望能给点个关注,以后还会陆续更新有关机器人的内容,点个关注不迷路~欢迎大家一起交流学习。
都看到这了,点个推荐再走吧~
未经允许,禁止转载。
ROS2学习之旅(14)——编写简单的发布者和订阅者(C++)的更多相关文章
- ROS2学习之旅(4)——理解ROS2 Graph中的节点
ROS(2)图(ROS(2) graph)是一个同时处理数据的基于ROS2元素的网络,它包含了所有的可执行文件以及它们之间的连接.图中的基本元素包括:节点(nodes).话题(topics).服务(s ...
- ROS2学习之旅(21)——创建一个动作服务和客户节点(C++)
动作是ROS中的一种异步通信形式,动作客户端向动作服务器发送目标请求,目标服务器向操作客户端发送目标反馈和结果.本文基于前一篇自定义动作博文. 1.创建一个action_turtorials_cpp包 ...
- ROS2学习之旅(15)——编写简单的服务和客户节点(C++)
当节点使用服务进行通信时,发送数据请求的节点称为客户节点,响应请求的节点称为服务节点.请求和响应的结构由.srv文件决定. 本文的例子是一个简单的整数加法系统:一个节点请求两个整数的和,另一个节点响应 ...
- ROS2学习之旅(13)——创建ROS2 功能包
一个功能包可以被认为是ROS2代码的容器.如果希望能够管理代码或与他人共享代码,那么需要将其组织在一个包中.通过包,可以发布ROS2工作,并允许其他人轻松地构建和使用它. 在ROS2中,创建功能包使用 ...
- ROS2学习之旅(2)——配置ROS2环境
目录 1.source一下setup文件 2.自动source 3.自动进入工作区(不常用) 4.检查环境变量是否设置成功 5.总结 ROS2依赖于使用shell(终端)环境组合工作空间的概念.工作空 ...
- ROS2学习之旅(12)——创建工作空间
workspace(工作空间)是包含ROS2 packages(包)的文件夹.在使用ROS 2之前,有必要在终端中source一下ROS 2的安装工作区,这样就可以在该终端中使用ROS 2的软件包. ...
- ROS学习(十三)—— 编写简单的Service和Client (C++)
一.编写Service节点 1.节点功能: 我们将创建一个简单的service节点("add_two_ints_server"),该节点将接收到两个整形数字,并返回它们的和. 2. ...
- ROS2学习之旅(1)——初识ROS2
本系列用来记录ROS2的学习过程,有错误或者不合理的地方请大家指正.由于博主具有ROS1的学习经历,会添加一些与ROS1的一些对比,当然这对于ROS2本身的学习内容没有丝毫影响,欢迎大家积极与我在评论 ...
- ROS2学习之旅(20)——创建一个动作消息
本文用来自定义一个动作消息类型. 以下命令用来创建一个工作空间并建立一个功能包: mkdir -p action_ws/src cd action_ws/src ros2 pkg create act ...
随机推荐
- TcaplusDB君 · 行业新闻汇编(5月25日)
TcaplusDB君一直密切关注着游戏行业和数据库行业的动态.以下是TcaplusDB君收集的近期的游戏行业和数据库行业的新闻,汇编整理,献给大家观看. (本篇文章部分内容来自网络) 第十一届中国数据 ...
- 【Microstation】三维建模基础及软件入门到精通实验教程目录
@ 目录 1. 专栏简介 2. 专栏地址 3. 专栏目录 1. 专栏简介 MicroStation是一款非常不错的二维和三维设计软件,由奔特力(Bentley)工程软件系统有限公司开发的一款软件.在C ...
- Python小白的数学建模课-04.整数规划
整数规划与线性规划的差别只是变量的整数约束. 问题区别一点点,难度相差千万里. 选择简单通用的编程方案,让求解器去处理吧. 『Python小白的数学建模课 @ Youcans』带你从数模小白成为国赛达 ...
- TVM性能评估分析(四)
TVM性能评估分析(四) Figure 1. Efficient Privacy-Preserving ML Using TVM Figure 2. Motivation: Privacy-Pre ...
- 使用Relay部署编译ONNX模型
使用Relay部署编译ONNX模型 本文介绍如何使用Relay部署ONNX模型的入门. 首先,必须安装ONNX软件包. 一个快速的解决方案是安装protobuf编译器,然后 pip install o ...
- 定位服务API案例
定位服务API案例 要使用定位服务API,需要确保设备已经下载并安装了HMS Core服务组件,并将Location Kit的SDK集成到项目中. 指定应用权限 Android提供了两种位置权限: A ...
- Caffe框架GPU与MLU计算结果不一致请问如何调试?
Caffe框架GPU与MLU计算结果不一致请问如何调试? 某一检测模型移植到Cambricon Caffe上时,发现无法检测出结果,于是将GPU和MLU的运行结果输出并保存后进行对比,发现二者计算结果 ...
- <题解>幻想乡战略游戏
洛谷题目 看到题面,很容易就想到,这是要你找树上的重心,只不过这个重心是在带边权的树上 所以对于这个我们在树上找这个重心 一开始我想的是,我要更新权值,然后把每个点的答案更新一下 就取最大值,这好像是 ...
- 性能工具之stress工具使用教程(带源码说明)
stress是一个在linux下的压力测试小工具. 我看到有些人用这个工具来描述一些资源耗尽的场景,也有人用它来做混沌测试中.请使用者要注意,这个工具并不是模拟业务问题的,是模拟系统级问题的.所以 ...
- Nebula 基于 ElasticSearch 的全文搜索引擎的文本搜索
本文首发于 Nebula Graph 公众号 NebulaGraphCommunity,Follow 看大厂图数据库技术实践. 1 背景 Nebula 2.0 中已经支持了基于外部全文搜索引擎的文本查 ...