Ubuntu16.04 安装ROS及其IDE
一. ROS的安装
1. 进入ROS官方网站 http://wiki.ros.org/
2. Install -> ROS Kinetic Kame -> Ubuntu
3. 详情可参考所打开的界面,具体命令行代码将在下面列出
4. 哦对了,首先应该配置一下软件的下载源。点击右上角的设置 -> 系统设置 -> 软件和更新 -> 下载自选择其他站点 -> 选择清华园的服务器
5. 安装ROS具体命令行如下:
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
sudo apt-get update
sudo apt-get install ros-kinetic-desktop-full
sudo rosdep init
rosdep update
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
sudo apt install python-rosinstall python-rosinstall-generator python-wstool build-essential
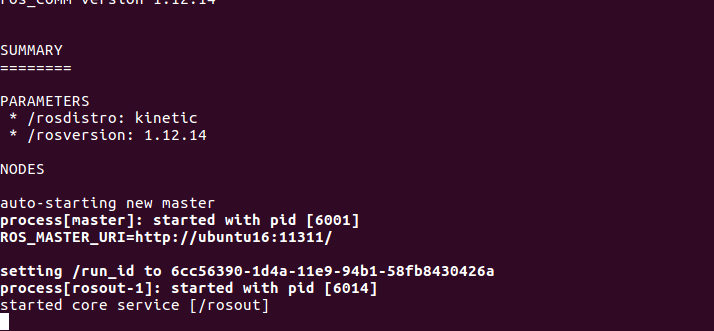
6. 重新打开一个命令行,输入 roscore,回车,出现如下界面表示安装成功
二. IDE:Roboware的安装
1. 推荐包安装方式,方便简单。打开官网 http://cn.roboware.me/#/Download
2. 选择Roboware Studio,下载Linux 64位版本
3. 双击下载包安装
4. 在命令行输入 roboware-studio,回车即可打开IDE
Ubuntu16.04 安装ROS及其IDE的更多相关文章
- ubuntu16.04安装Ros(kinetic版本)【亲测好用】
准备 1.ubuntu16.04 64位桌面版 ps:关于系统的下载和安装这里不做介绍,请自行百度,不是介绍重点 2.更改源 图上的几个勾默认是选上的,如果没有选上,选成上图这样(如果修改过勾,点击关 ...
- ROS_Kinetic_01 在ubuntu 16.04安装ROS Kinetic 2017.01更新
ROS_Kinetic系列学习(一),在ubuntu 16.04安装ROS Kinetic. Celebrating 9 Years of ROS! ubuntu16.04已经发布半年多了,ROS的K ...
- Ubuntu16.04安装Mono、MonoDevelop运行C#代码
Ubuntu16.04安装MonoDevelop运行C#代码 在Ubuntu上安装Mono 运行下面代码授权注册repo源并更新软件列表: Add the Mono repository to you ...
- ROS:使用ubuntuKylin17.04安装ROS赤xi龟
使用ubuntuKylin17.04安装 参考了此篇文章:SLAM: Ubuntu16.04安装ROS-kinetic 重复官方链接的步骤也没有成功. 此后发现4.10的内核,不能使用Kinetic. ...
- ubuntu16.04安装jdk,tomcat
ubuntu16.04安装jdk,tomcat 最近装了一下tomcat,网上的教程很多,我也试了很多次,但是有一些教程关于tomcat配置是错误的,让我走上了歧途.差点重装系统,还好王总及时出手帮助 ...
- Ubuntu16.04 安装openjdk-7-jdk
Ubuntu16.04 安装openjdk-7-jdk sudo apt-get install openjdk-7-jre 或者sudo apt-get install openjdk-7-jdk ...
- Ubuntu16.04安装GTK3主题:OSX-Arc
Ubuntu16.04安装GTK3主题:OSX-Arc GTK3主题:OSX-Arc描述: 前几个月,Gnome3.20升3.22的时候,出现了大量主题崩溃的现象,其中包括Arc.Flatabulou ...
- Ubuntu16.04安装opencv for python/c++
Ubuntu16.04安装opencv for python/c++ 网上关于opencv的安装已经有了不少资料,但是没有一篇资料能让我一次性安装成功,因此花费了大量时间去解决各种意外,希望这篇能给一 ...
- ubuntu16.04安装不上有道词典的解决办法
转自:http://www.linuxdiyf.com/linux/21143.html ubuntu16.04安装不上有道词典,提示: le@hu-pc:~/下载$ sudo dpkg -i you ...
随机推荐
- Spring Security中html页面设置hasRole无效的问题
Spring Security中html页面设置hasRole无效的问题 一.前言 学了几天的spring Security,偶然发现的hasRole和hasAnyAuthority的区别.当然,可能 ...
- VS启动Winform项目提示:不支持互操作调试
64 位平台不支持互操作调试(托管 + 非托管混合模式调试). 在VS中设置项目属性--->调试--->取消选中“启用本地代码调试”. 此问题在.NET FrameWork低版本框架会出现 ...
- 让MEF插上AOP的翅膀
什么是MEF Git:https://github.com/MicrosoftArchive/mef MEF也是一款ioc框架,貌似历史比较悠久了. 这里有一篇.net阵容里面主流ioc比较. htt ...
- 构建一个 预装 pm2 的 node 项目 docker 底包
Dockerfile: 创建 dockerfile 文件, 命名为 dockerfile-yourProject-node.8.12.0-pm2 # MAGE: yourGroup/yourProje ...
- 使用Kubeadm(1.13+)快速搭建Kubernetes集群
Kubeadm是管理集群生命周期的重要工具,从创建到配置再到升级,Kubeadm处理现有硬件上的生产集群的引导,并以最佳实践方式配置核心Kubernetes组件,以便为新节点提供安全而简单的连接流程并 ...
- 简单实用而不追求时髦的 Vim 配置
前言 由于 Vim 的广泛流行,在网络上关于 Vim 的自定义配置汗牛充栋.既有高手 Tim Pope 的极简配置 tpope/vim-sensible(这个配置一个插件都没有),也有 spf13/s ...
- docker 及 docker-compose 的快速安装和简单使用
本篇将使用 DaoCloud 源在 Ubuntu 上简单快速安装 docker 及 docker-compose 并添加了通过 Dockerfile 及 docker-compose.yml 使用 n ...
- Python公众号开发(二)—颜值检测
上篇文章,我们把自己的程序接入了微信公众号,并且能把用户发送的文本及图片文件原样返回.今天我们把用户的图片通过腾讯的AI平台分析后再返回给用户. 为了防止我的文章被到处转载,贴一下我的公众号[智能制造 ...
- linux入门--Linux的应用领域
Linux 似乎在我们平时的生活中很少看到,那么它应用在哪些领域呢?其实,在生活中随时随地都有 Linux 为我们服务着. 网站服务器 用事实说话!访问国际知名的 Netcraft 网站 http:/ ...
- SpringBoot + SpringCloud学习踩坑实记
踩的坑: 1).springcloud框架中,依赖一直报错,很可能是没有添加springcloud的依赖,或者是依赖的版本号过低.并且springboot也有一个父依赖. 2.springcloud ...