SLAM+语音机器人DIY系列:(三)感知与大脑——6.做一个能走路和对话的机器人
摘要
在我的想象中机器人首先应该能自由的走来走去,然后应该能流利的与主人对话。朝着这个理想,我准备设计一个能自由行走,并且可以与人语音对话的机器人。实现的关键是让机器人能通过传感器感知周围环境,并通过机器人大脑处理并输出反馈和执行动作。本章节涉及到的传感器有激光雷达、IMU、轮式里程计、麦克风、音响、摄像头,和用于处理信息的嵌入式主板。关于传感器的ROS驱动程序开发和在机器人上的使用在后面的章节会展开,本章节重点对机器人传感器和嵌入式主板进行讲解,主要内容:
6.做一个能走路和对话的机器人
在我的想象中机器人首先应该能自由的走来走去,然后应该能流利的与主人对话。朝着这个理想,我准备设计一个能自由行走,并且可以与人语音对话的机器人。为了更形象的表达我的想法,我的小学五年级的绘画水平也是豁出去了,如果有大神路过,恳请多多包涵,画好后的样子大概就是这样啦,如图46。
(图46)想象中的机器人
有了想法,接下来就要开始亲自动手DIY了。体验动手乐趣的同时,以玩耍的形式融入当下前沿的SLAM、自动导航、图像识别、语音识别、自然语言处理等技术,提高自己的同时找到属于儿时的那一份快了。
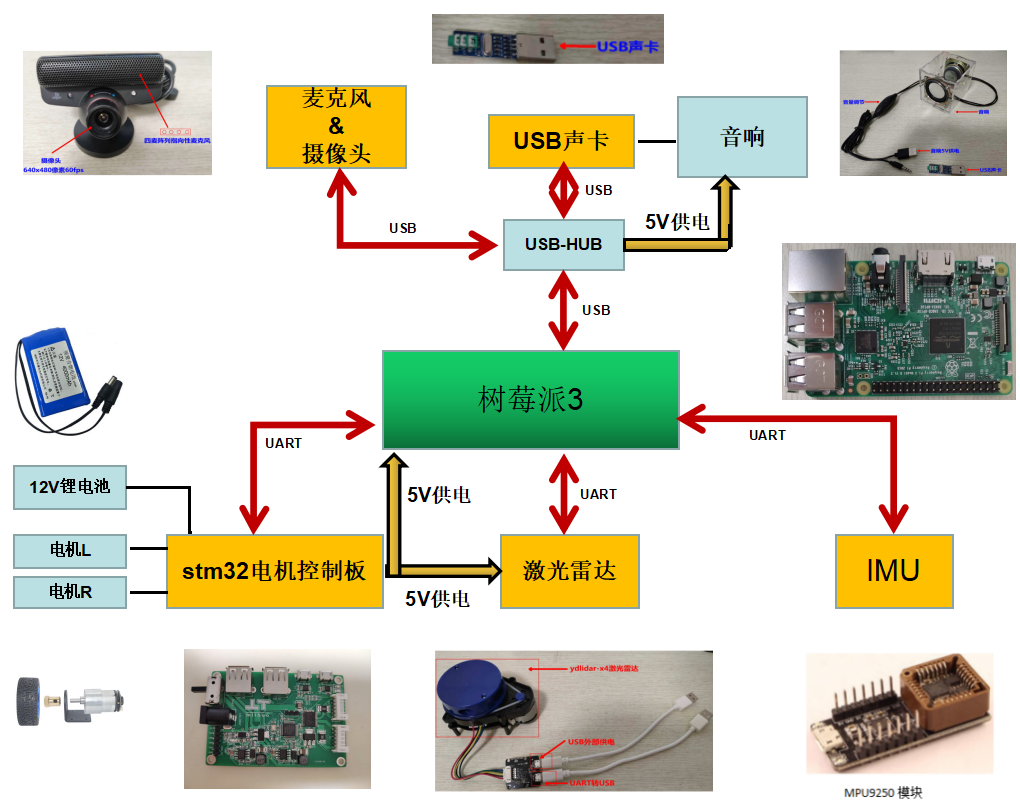
说干就干,首先需要准备好激光雷达、IMU、底盘、音响、麦克风、摄像头这些传感器,然后还要准备一块树莓派3开发板作为机器人的大脑。其实这些知识已经通过前面的文章打好了基础,所以就好办多了,准备好这些东西就好了,如图47。

(图47)DIY部件准备
准备好传感器和树莓派3后,就可以进行组装了。经过紧张有趣的组装后,一台有趣的机器人就被DIY出来了,这时候终于可以看到传说中的机器人的真容了,如图48,虽然机器人的真实样子没有想象中的那么有艺术感,但科技感十足有木有@^@

(图48)DIY出来的机器人真容
麻雀虽小五脏俱全,现在就来对这个会说话会走路的机器人做一做剖析吧。机器人的骨架是由亚克力板和铜柱组合而成;两个带编码器的减速电机和一个万向轮作为运动执行机构;可充电锂电池给整个机器人供电;stm32电机控制板用于控制电机运动并提供里程数据,是底盘的核心部件;激光雷达提供环境障碍信息,用于SLAM建图和避障导航;IMU用于在里程计数据融合、SLAM建图、导航中提供惯导数据;免驱USB声卡、音响、四麦阵列指向性麦克风作为语音交互过程中的输入输出部件;摄像头用于物体识别、物体跟踪、环境监控、视觉辅助定位;树莓派3是整个机器人的中央处理单元,各个传感器的ROS驱动、SLAM算法、导航算法、语音交互、自然语言处理算法、图像处理算法都将运行在上面。为了更好的理解机器人的工作原理,这里给出机器人的硬件框架,如图49。
(图49)机器人硬件框架
机器人的硬件搭建完毕后,就要赋予机器人灵魂了。这里说的灵魂就是我们的软件及算法,包括各个传感器的ROS驱动、轮式里程计与IMU融合、激光SLAM建图、自主导航避障、语音识别、语音合成、自然语言处理、物体识别、物体跟踪、远程视频监控、视觉辅助定位、机器人与工作PC、Android手机之间的通信等。为了更好的理解机器人的工作原理,这里给出机器人的软件框架,如图50。
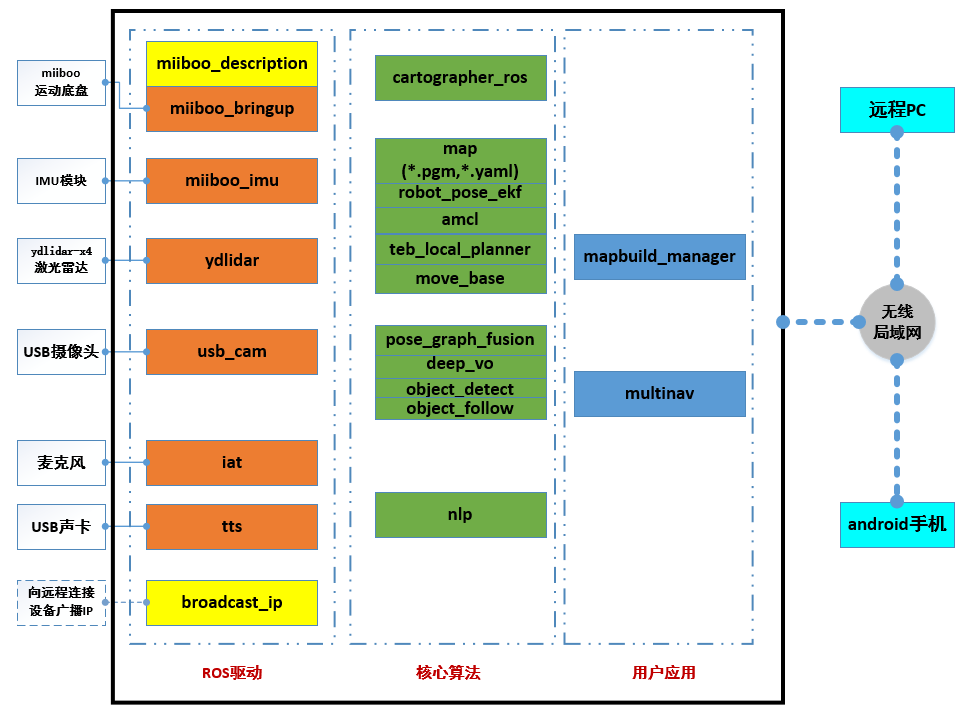
(图50)机器人软件框架
做了如此长的铺垫,大家肯定已经等不及要亲自动手去开发机器人上的软件代码了。别急,接下来的章节将跟你娓娓道来,让你体验动手写程序真正的快乐$^$
后记
------SLAM+语音机器人DIY系列【目录】快速导览------
第1章:Linux基础
第2章:ROS入门
第3章:感知与大脑
第4章:差分底盘设计
第5章:树莓派3开发环境搭建
第6章:SLAM建图与自主避障导航
2.google-cartographer机器人SLAM建图
第7章:语音交互与自然语言处理
第8章:高阶拓展
2.centos7下部署Django(nginx+uwsgi+django+python3)
----------------文章将持续更新,敬请关注-----------------
如果大家对博文的相关类容感兴趣,或有什么技术疑问,欢迎加入下面的《SLAM+语音机器人DIY》QQ技术交流群,一起讨论学习^_^

SLAM+语音机器人DIY系列:(三)感知与大脑——6.做一个能走路和对话的机器人的更多相关文章
- SLAM+语音机器人DIY系列:(三)感知与大脑——2.带自校准九轴数据融合IMU惯性传感器
摘要 在我的想象中机器人首先应该能自由的走来走去,然后应该能流利的与主人对话.朝着这个理想,我准备设计一个能自由行走,并且可以与人语音对话的机器人.实现的关键是让机器人能通过传感器感知周围环境,并通过 ...
- SLAM+语音机器人DIY系列:(三)感知与大脑——1.ydlidar-x4激光雷达
摘要 在我的想象中机器人首先应该能自由的走来走去,然后应该能流利的与主人对话.朝着这个理想,我准备设计一个能自由行走,并且可以与人语音对话的机器人.实现的关键是让机器人能通过传感器感知周围环境,并通过 ...
- SLAM+语音机器人DIY系列:(三)感知与大脑——3.轮式里程计与运动控制
摘要 在我的想象中机器人首先应该能自由的走来走去,然后应该能流利的与主人对话.朝着这个理想,我准备设计一个能自由行走,并且可以与人语音对话的机器人.实现的关键是让机器人能通过传感器感知周围环境,并通过 ...
- SLAM+语音机器人DIY系列:(三)感知与大脑——4.音响麦克风与摄像头
摘要 在我的想象中机器人首先应该能自由的走来走去,然后应该能流利的与主人对话.朝着这个理想,我准备设计一个能自由行走,并且可以与人语音对话的机器人.实现的关键是让机器人能通过传感器感知周围环境,并通过 ...
- SLAM+语音机器人DIY系列:(三)感知与大脑——5.机器人大脑嵌入式主板性能对比
摘要 在我的想象中机器人首先应该能自由的走来走去,然后应该能流利的与主人对话.朝着这个理想,我准备设计一个能自由行走,并且可以与人语音对话的机器人.实现的关键是让机器人能通过传感器感知周围环境,并通过 ...
- SLAM+语音机器人DIY系列:(六)SLAM建图与自主避障导航——2.google-cartographer机器人SLAM建图
摘要 通过前面的基础学习,本章进入最为激动的机器人自主导航的学习.在前面的学习铺垫后,终于迎来了最大乐趣的时刻,就是赋予我们的miiboo机器人能自由行走的生命.本章将围绕机器人SLAM建图.导航避障 ...
- SLAM+语音机器人DIY系列:(二)ROS入门——6.编写简单的service和client
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- SLAM+语音机器人DIY系列:(四)差分底盘设计——4.底盘ROS驱动开发
摘要 运动底盘是移动机器人的重要组成部分,不像激光雷达.IMU.麦克风.音响.摄像头这些通用部件可以直接买到,很难买到通用的底盘.一方面是因为底盘的尺寸结构和参数是要与具体机器人匹配的:另一方面是因为 ...
- SLAM+语音机器人DIY系列:(四)差分底盘设计——5.底盘PID控制参数整定
摘要 运动底盘是移动机器人的重要组成部分,不像激光雷达.IMU.麦克风.音响.摄像头这些通用部件可以直接买到,很难买到通用的底盘.一方面是因为底盘的尺寸结构和参数是要与具体机器人匹配的:另一方面是因为 ...
随机推荐
- bzoj 1426 收集邮票
f[i]:当前已拥有i种邮票,还需要买的邮票数的期望值. g[i]:当前已拥有i种邮票,还需要的钱的期望值. 每张邮票初始都是1元钱,每买一张邮票,还没购买的邮票每张都涨价1元. f[i]=1+(n ...
- BZOJ_2343_[Usaco2011 Open]修剪草坪 _单调队列_DP
BZOJ_2343_[Usaco2011 Open]修剪草坪 _单调队列_DP 题意: N头牛,每头牛有一个权值,选择一些牛,要求连续的不能超过k个,求选择牛的权值和最大值 分析: 先考虑暴力DP,f ...
- Javascript保证精度的小数乘法
众所周知,js的小数乘法很容易丢失精度,这是一件很恶心的事情.所以我写了这个方法,保证计算精度./** * js小数乘法 *@parameter arg1:被乘数(接受小数和整数) *@paramet ...
- 【.NET异步编程系列2】掌控SynchronizationContext避免deadlock
引言: 多线程编程/异步编程非常复杂,有很多概念和工具需要去学习,贴心的.NET提供Task线程包装类和await/async异步编程语法糖简化了异步编程方式. 相信很多开发者都看到如下异步编程实践原 ...
- 微服务架构 - CentOS7离线部署docker
1.环境准备 系统环境为: CentOS Linux release 7.5.1804 (Core) 安装docker版本为: 17.12.0-ce 2.准备部署文件 在http://mirrors. ...
- 『发呆』.Net 2.0 ~ .Net 4.0 所实现了那些底层
随着时间的推移,程序越写越大,代码越写越少. 今天突然发呆,就想比较全面的汇总一下 .Net 2.0 和 .Net 4.0 都实现的功能. .Net 2.0 的大部分常见程序集 (已经过滤掉了一部分和 ...
- 《k8s-1.13版本源码分析》-测试环境搭建(k8s-1.13版本单节点环境搭建)
本文原始地址(gitbook格式):https://farmer-hutao.github.io/k8s-source-code-analysis/prepare/debug-environment. ...
- 【4】Asp.Net Core2.2中间件多扩展对应应用
[前言] 上一篇完成了Asp.Net Core 2.2全新的管道处理模型解析,“俄罗斯套娃”式的委托嵌套和传递,组建了扩展性无与伦比的管道模型!与此同时,委托嵌套过于复杂,使用起来并不友好,然后多种扩 ...
- 细说并发编程-TPL
本节导航 基本概念 并发编程 TPL 线程基础 windows为什么要支持线程 线程开销 CPU的发展 使用线程的理由 如何写一个简单Parallel.For循环 数据并行 Parallel.For剖 ...
- DateTime Tips
DateTime Tips(System.Runtime Version=4.2.1.0) 抛砖引玉,如有错误或是更好的方式还望不吝赐教 1. 根据某个DateTime对象取其当天的起始时间例如:输入 ...