Linux内核驱动学习(七)应用层直接操作GPIO
简介
前面通过libgpio的方式介绍了内核空间对GPIO进行操作的接口,其做了较好的封装,同时Linux系统的sysfs机制已经在系统路径下/sys/class/gpio注册了相应的节点,通过读写该节点下的文件就能轻松的完成GPIO输入输出配置以及引脚状态的获取。
原理图
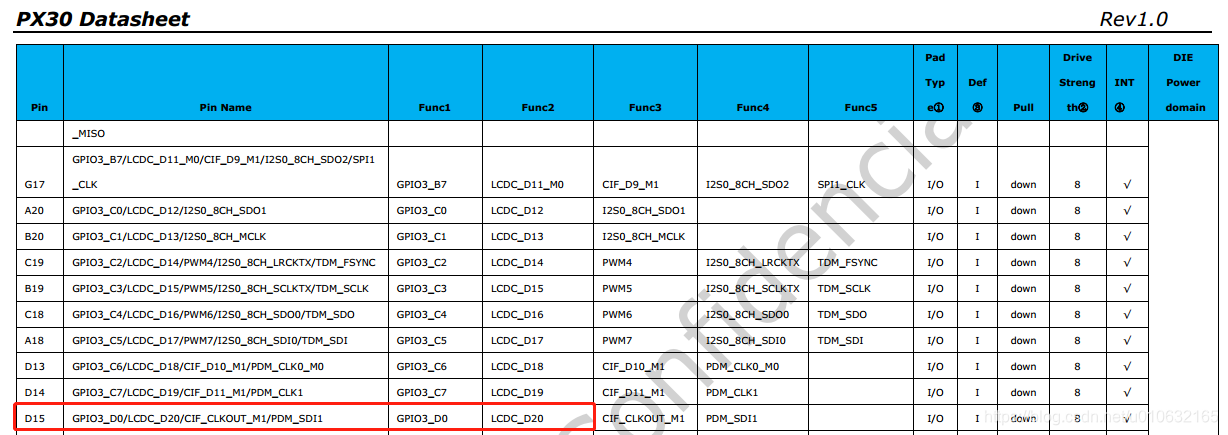
我使用的Rockchip的px30,引脚是GPIO3_D0,具体硬件肯定会不同,注意参考soc的datasheet和硬件原理图,先定位正确需要操作的GPIO,千里之行始于足下。
节点
在/sys/class/gpio路径下有export和unexport这两个文件;GPIO3_D0在这里是120,具体硬件和数字的对应关系后面会继续讲到;
echo 120 > /sys/class/gpio/export
执行以上这条指令后,会在/sys/class/gpio/下生成gpio120节点,简单看一下该路径下都有哪些文件;
$ /sys/class/gpio/gpio120
$ active_low device direction edge power subsystem uevent value
设置为输出
$ cd /sys/class/gpio/gpio120
$ echo 0 > active_low
$ echo out > direction
$ echo 1 > value #输出高
$ echo 0 > value #输出低
另一种情况,设置active_low为1,就会出现另一种情况;
$ cd /sys/class/gpio/gpio120
$ echo 1 > active_low
$ echo out > direction
$ echo 1 > value #输出低
$ echo 0 > value #输出高
由此看出,active_low的作用已经很明显了,后面没有特别指出的情况下,active_low的值默认为0;一表胜过千言万语,简单整理一个表格,如下所示;
| active_low | value | 实际GPIO输出 |
|---|---|---|
| 0 | 1 | high |
| 0 | 0 | low |
| 1 | 1 | low |
| 1 | 0 | high |
设置为输入
$ cd /sys/class/gpio/gpio120
$ echo int > direction
$ cat value #读取GPIO的电平状态
映射关系
Rockchip px30平台的GPIO总共分为GPIO0~GPIO3四组,每一组最多有32个GPIO,依次分为A,B,C,D四个小组,每组最多8个,对于硬件上实际没有达到8个的情况下,计算偏移的时候,也按照8来计算。RK平台可以参考dt-bindings/pinctrl/rockchip.h。其他平台的话,如果有源代码可以参考以下厂商给出的具体定义,并结合SOC的原理图和硬件原理图,来计算。
具体计算如下表所示;依次类推;
| 引脚 | 计算 |
|---|---|
| GPIO3_D0 | 3*32 + 3*8 + 0 = 120 |
| GPIO3_D1 | 3*32 + 3*8 + 1 = 121 |
| GPIO2_A1 | 2*32 + 0*8 + 1 = 65 |

debugfs
debugfs 是 Linux系统下为了方便驱动开发人员对驱动调试的文件系统。
$ cat /sys/kernel/debug/gpio
可以通过debugfs查看gpio-120硬件上的实际输出和软件上是否相符合;

pwm demo
强迫症的我简单写了一个模拟pwm的shell,虽然比较鸡肋,因为是占空比,频率都是不可调的,单纯是为了看一下控制的效果,前提是已经执行echo 120 > export这条指令并且成功生成相应的节点,代码简单如下;
#!/bin/bash
GPIO=120
i=0
value=0
while [ 1 -eq 1 ]
do
i=$(($i + 1))
if [ $(( $i % 2 )) -eq 0 ]
then
value=0
else
value=1
fi
echo "current i is $i"
echo "current value is $value"
echo $value > /sys/class/gpio/gpio$GPIO/value
usleep 1000
done
用示波器测量GPIO3_D0引脚的波形,和预期的一样;

Linux内核驱动学习(七)应用层直接操作GPIO的更多相关文章
- Linux内核驱动学习(八)GPIO驱动模拟输出PWM
文章目录 前言 原理图 IO模拟输出PWM 设备树 驱动端 调试信息 实验结果 附录 前言 上一篇的学习中介绍了如何在用户空间直接操作GPIO,并写了一个脚本可以产生PWM.本篇的学习会将写一个驱动操 ...
- Linux内核驱动学习(六)GPIO之概览
文章目录 前言 功能 如何使用 设备树 API 总结 前言 GPIO(General Purpose Input/Output)通用输入/输出接口,是十分灵活软件可编程的接口,功能强大,十分常用,SO ...
- linux内核驱动中对字符串的操作【转】
转自:http://www.360doc.com/content/12/1224/10/3478092_255969530.shtml Linux内核中关于字符串的相关操作,首先包含头文件: #inc ...
- linux内核驱动学习指南
1. 参考链接 小白的博客 ONE_Tech 你为什么看不懂Linux内核驱动源码? 求教怎么学习linux内核驱动
- Linux内核驱动学习(九)GPIO外部输入的处理
文章目录 前言 设备树 两个结构体 gpio_platform_data gpio_demo_device 两种方式 轮询 外部中断 总结 附录 前言 前面是如何操作GPIO进行输出,这里我重新实现了 ...
- Linux内核驱动学习(三)字符型设备驱动之初体验
Linux字符型设备驱动之初体验 文章目录 Linux字符型设备驱动之初体验 前言 框架 字符型设备 程序实现 cdev kobj owner file_operations dev_t 设备注册过程 ...
- Linux内核驱动学习(二)添加自定义菜单到内核源码menuconfig
文章目录 目标 drivers/Kconfig demo下的Kconfig 和 Makefile Kconfig Makefile demo_gpio.c 目标 Kernel:Linux 4.4 我编 ...
- Linux内核驱动学习(十)Input子系统详解
文章目录 前言 框架 如何实现`input device` 设备驱动? 头文件 注册input_dev设备 上报按键值 dev->open()和dev->close() 其他事件类型,处理 ...
- Linux内核驱动学习(一)编写最简单Linux内核模块HelloWorld
文章目录 准备工作 什么是内核模块 编写 hello.c 模块编译 相关指令 测试结果 模块加载 模块卸载 准备工作 在进行以下操作前,首先我准备了一台电脑,并且安装了虚拟机,系统是Ubuntu16. ...
随机推荐
- python在办公时能给我们带来什么?
前言 文的文字及图片来源于网络,仅供学习.交流使用,不具有任何商业用途,版权归原作者所有,如有问题请及时联系我们以作处理. 作者:谦睿科技教育 PS:如有需要Python学习资料的小伙伴可以加点击下方 ...
- B. 复读机的力量
我们规定一个人是复读机当且仅当他说的每一句话都是复读前一个人说的话. 我们规定一个人是复读机当且仅当他说的每一句话都是复读前一个人说的话. 我们规定一个人是复读机当且仅当他说的每一句话都是复读前一个人 ...
- 1196F - K-th Path
题目链接: http://codeforces.com/problemset/problem/1196/F 题目大意::无向图,求任意两点第k短的路径 思路:按照边的大小,只保留前K个边,如果不连同的 ...
- 用网线连接Windows和Linux台式机,并实现Linux共享Windows的WiFi网络
前言 由于工作需要,需要利用网线将自己的笔记本和Linux台式机进行连接,实现Windows可以远程登录Linux机器,并实现Linux共享Windows的WiFi网络. 网上的很多方法可以实现两台机 ...
- [转载]MySQL中int(11)最大长度是多少?
原文地址:https://blog.csdn.net/allenjay11/article/details/76549503 今天在添加数据的时候,发现当数据类型为 int(11) 时,我当时让用户添 ...
- 树莓派4b 上手三板斧
树莓派4b 上手三板斧 1.无屏幕和网线连接准备 windows / mac 电脑下载安装Notepad++ 新建文件并保存为ssh(该文件为空文件) 新建文件wpa_supplicant.conf ...
- 页面性能分析-Chrome Dev Tools
一.分析面板介绍 进行页面性能快速分析的主要是图中圈出来的几个模块功能: Network : 页面中各种资源请求的情况,这里能看到资源的名称.状态.使用的协议(http1/http2/quic...) ...
- TensorFlow keras 迁移学习
数据的读取 import tensorflow as tf from tensorflow.python import keras from tensorflow.python.keras.prepr ...
- 闲聊http1.1的6个方法
GET :获取资源GET 方法用来请求访问已被 URI 识别的资源.指定的资源经服务器端解析后返回响应内容. POST :传输实体主体POST 方法用来传输实体的主体.虽然用 GET 方法也可以传输实 ...
- Docker安装yapi
安装docker 1.安装依赖包: yum install -y yum-utils device-mapper-persistent-data lvm2 2.安装 Yum -y install do ...