u-boot移植(一)---准备工作
一、工具链的制作
1.1 工具
软件工具:crosstool-ng
下载地址:git clone https://github.com/crosstool-ng/crosstool-ng
crosstool-ng的环境需要libncurse5-dev
sudo apt-get install libncurse5-dev
安装autoconf: sudo apt-get install autoconf
进入crosstool-ng目录,执行./bootstrap,生成 configure 执行文件
检查安装环境,报什么错,就安装什么软件:./configure --prefix=`pwd`/crosstool
需要的软件有:
sudo apt-get install gperf bison flex texinfo help2man gawk
执行命令 make执行命令:
make install
export PATH="${PATH}:`pwd`/crosstool/bin"
1.2 开始制作
1.2.1 建立目标文件夹
根目录下建立三个文件夹:
mkdir src x-tools crosstool

1.2.2 环境
进入crosstool目录:cd ~/.crosstool
执行:ct-ng list-samples
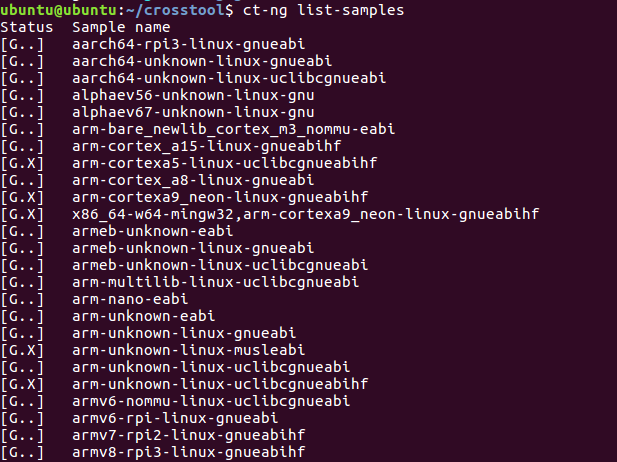
选择arm-unknown-linux-gnueabi 作为交差编译工具链的模版
执行命令:ct-ng show-arm-unknown-linux-gnueabi,查看编译交差编译工具链所需要的配置

下载gcc 6.3.0:wget http://ftp.gnu.org/gnu/gcc/gcc-6.3.0/gcc-6.3.0.tar.gz

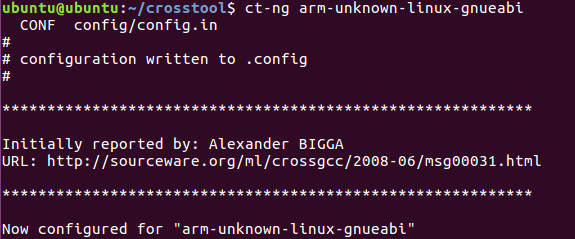
执行命令:ct-ng arm-unknown-linux-gnueabi
执行命令:ct-ng menuconfig

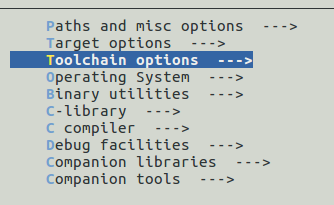
选择 Target options
*** Target optimisations ***
(armv4t) Architecture level :指令集架构,exynos4412为armv7-a架构,-march=name
(arm920t) Emit assembly for CPU :CPU核心类型, -mcpu=name
() Tune for CPU:对CPU的优化,具体可以查看芯片手册,-mtune=name

最新版本的crosstool-ng只需要选择第一二项目就好了。
选择 toolchain options:

u-boot 2016.01 不支持GCC6,因此 要把 GCC的版本改成GCC5.0版本--GCC6.0版本之间。
保存退出。
1.2.3 编译
执行命令:ct-ng build

编译成功:

建立环境变量:
vim .bashrc,加入下面一行
PATH=~/x-tools/arm-s3c2440a-linux-gnueabihf/bin:$PATH/
执行 source .bashrc
执行 arm-s3c2440a-linux-gnueabi-gcc -v

u-boot 2016.01 不支持GCC6,因此 要把 GCC的版本改成GCC5.0版本--GCC6.0版本之间。
二、u-boot 工作目录建立
下载u-boot_2016.01版本,解压u-boot。

2.1 board目录修改
2.1.1 创建jz2440板
查看 ../board/samsung/ 目录下的文件:

此版本中,2440已经被遗弃。所以选定smdk2410为模版创建2440的u-boot。

2.1.2 jz2440文件名修改
修改文件名:

2.1.3 Kconfig修改
修改Kconfig和Makefile文件,将里面的smdk2410修改为jz2440,如下:
Kconfig文件:
2.1.4 Makefile修改
2.2 修改头文件

头文件中增加内容:

添加对S3C2440的支持
找到包含smdk2410.h这个头文件的文件:

没有需要修改的地方
2.3 修改配置文件
当前新版的u-boot与linux源码一样,都执行make menuconfig 进行配置,所以在configs目录下要有jz2440的配置。
config目录下配置:


2.5 修改arch/arm下的配置文件
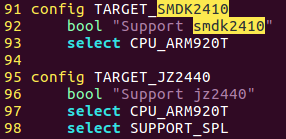
arch/arm/Kconfig,里面添加对jz2440的支持

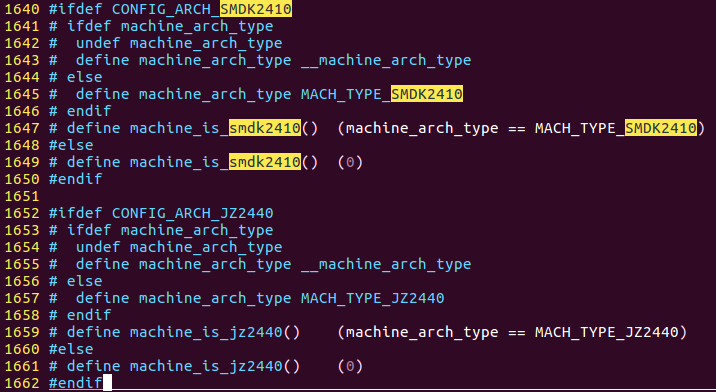
2.6 修改rch/arm/include/asm/mach-types.h

三、配置.config及编译u-boot
3.1 配置.config
执行命令:make jz2440_defconfig

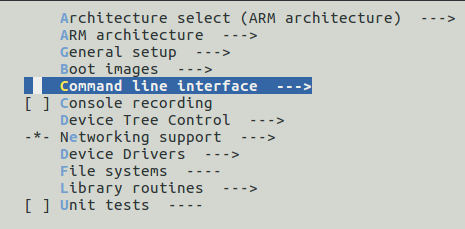
执行命令:make menuconfig
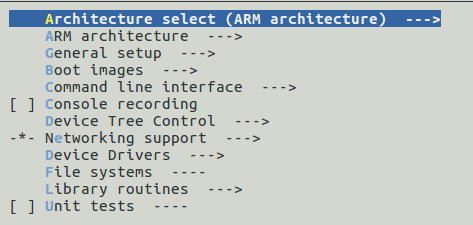
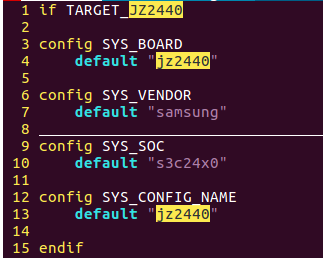
在ARM architecture中选择target_select项,然手选择jz2440:

配置 u-boot的命令行提示符:

保存退出配置。
3.2 编译

编译成功:
四、编译错误
4.1 Not enough room for program headers
arm-2440-linux-gnueabi-ld.bfd: u-boot: Not enough room for program headers, try linking with -N
arm-2440-linux-gnueabi-ld.bfd: final link failed: Bad value
make: *** [Makefile:1193: u-boot] Error 1
解决方法:https://www.mail-archive.com/u-boot@lists.denx.de/msg235861.html
在根目录的Makefile中加上如下几行:

u-boot移植(一)---准备工作的更多相关文章
- 标题:u-boot 移植步骤详解
1 U-Boot简介U-Boot,全称Universal Boot Loader,是遵循GPL条款的开放源码项目.从FADSROM.8xxROM.PPCBOOT逐步发展演化而来.其源码目录.编译形式与 ...
- -boot移植(十一)---代码修改---支持nandflash
一.移植前的修改 1.1 include/configs/jz2440修改 原来的定义: 可以看出,要先定义CONFIG_CMD_NAND才能使能NANDFlash. 这个在我们文件中的82行有定义, ...
- Android shell 下 busybox,clear,tcpdump、、众多命令的移植
http://my.oschina.net/mopidick/blog/167372 作为一名Android开发者,经常需要进入Android 的shell终端运行一些命令.但是我们发现Android ...
- 【安富莱】【RL-TCPnet网络教程】第10章 RL-TCPnet网络协议栈移植(FreeRTOS)
第10章 RL-TCPnet网络协议栈移植(FreeRTOS) 本章教程为大家讲解RL-TCPnet网络协议栈的FreeRTOS操作系统移植方式,学习了第6章讲解的底层驱动接口函数之后,移植就 ...
- 【RL-TCPnet网络教程】第9章 RL-TCPnet网络协议栈移植(uCOS-III)
第9章 RL-TCPnet网络协议栈移植(uCOS-III) 本章教程为大家讲解RL-TCPnet网络协议栈的uCOS-III操作系统移植方式,学习了第6章讲解的底层驱动接口函数之后,移 ...
- 【安富莱】【RL-TCPnet网络教程】第8章 RL-TCPnet网络协议栈移植(RTX)
第8章 RL-TCPnet网络协议栈移植(RTX) 本章教程为大家讲解RL-TCPnet网络协议栈的RTX操作系统移植方式,学习了第6章讲解的底层驱动接口函数之后,移植就比较容易了,主要 ...
- 【安富莱】【RL-TCPnet网络教程】第7章 RL-TCPnet网络协议栈移植(裸机)
第7章 RL-TCPnet网络协议栈移植(裸机) 本章教程为大家讲解RL-TCPnet网络协议栈的裸机移植方式,学习了上个章节讲解的底层驱动接口函数之后,移植就比较容易了,主要是添加库文 ...
- Spring Boot(1)——开发你的第一款Spring Boot应用(Edition1)
Spring Boot(1)——开发你的第一款Spring Boot应用(Edition1) 准备工作: java:java 8 或者 java 9: Spring框架:5.0.8.RELEASE或以 ...
- FreeRTOS——1
以下转载自安富莱电子: http://forum.armfly.com/forum.php FreeRTOS 的特点 FreeRTOS 的主要特点如下:1. 支持抢占式调度,合作式调度和时间片调度.2 ...
- Jlink下载u-boot
由于各种原因我的fl2440无启动代码,无任何程序,这时要通过jlink来烧录相关boot程序. 准备工作: 1.Jlink使用jlink commander工具 2.初始化sdram的程序boot. ...
随机推荐
- MES模块
基础数据管理:产品模型.工厂模型.工艺模型 仓储管理 成本管理 绩效管理 看板管理 日志管理 设备管理:工装管理.设计器具管理.设备保养管理.设备备件管理.设备采集管理.设备点检管理.设备故障管理.设 ...
- linux bin & sbin different
linux bin & sbin different flutter & $PATH http://blog.taylormcgann.com/2014/04/11/differenc ...
- Bash Game 巴什博弈
巴什博弈(Bash Game,同余理论):只有一堆n个物品,两个人轮流从这堆物品中取物,规定每次至少取一个,最多取m个.最后取光者得胜. 显然,如果n=m+1,那么由于一次最多只能取m个,所以,无论先 ...
- hdu 3727 Jewel (可持久化线段树+bit)
链接: http://acm.hdu.edu.cn/showproblem.php?pid=3727 题意: 对一段序列进行四种操作: Insert x :在序列尾部插入一个x: Query_1 s ...
- Fail2ban 配置
本例为wordpress管理员登陆限制安装rpm -Uvh http://download.fedoraproject.org/pub/epel/6/x86_64/epel-release-6-8.n ...
- Shell基础知识(三)
Shell中变量的作用域: 在当前Shell会话中使用,全局变量. 在函数内部使用,局部变量. 可以在其他Shell会话中使用,环境变量. 局部变量: 默认情况下函数内的变量也是全局变量 #!/bin ...
- CF1073E Segment Sum 解题报告
CF1073E Segment Sum 题意翻译 给定\(K,L,R\),求\(L~R\)之间最多不包含超过\(K\)个数码的数的和. \(K\le 10,L,R\le 10^{18}\) 数位dp ...
- 老铁,这年头得玩玩这个:Git基本操作【github】
GitHub创建项目 本地创建项目 1.初始化配置,设置仓库人员的用户名和邮箱地址,这一步必不可少 git config --global user.name "uncleyong" ...
- 总结那些有默认margin,padding值的html标签
一.h1~h6标签:有默认margin(top,bottom且相同)值,没有默认padding值. 在chrome中:16,15,14,16,17,19; 在firefox中:16,15,14,16, ...
- 火狐浏览器高度&制作简单万年历&弹出层
浏览器高度: FireFox中: document.body.clientWidth ==> BODY对象宽度 document.body.clientHeight ==> BODY对象高 ...