rqt的安装及详细介绍
1. 安装
安装极其简单,不多介绍,直接上命令:
Melodic:
sudo apt-get install ros-melodic-rqt
sudo apt-get install ros-melodic-rqt-common-plugins
Noetic
sudo apt-get install ros-noetic-rqt
sudo apt-get install ros-noetic-rqt-common-plugins
2. 部分工具的功能介绍及使用方法
1)rqt_gui
ROS GUI开发工具(rqt)
rosrun rqt_plot rqt_plot //画出发布在topic上的数据变化图 rosrun rqt_graph rqt_graph //画出node关系图 rosrun rqt_console rqt_console //属于ROS日志框架(logging framework)的一部分,用来显示节点的输出信息 rosrun rqt_reconfigure rqt_reconfigure //参数动态配置工具 rosrun rqt_tf_tree rqt_tf_tree //tf树
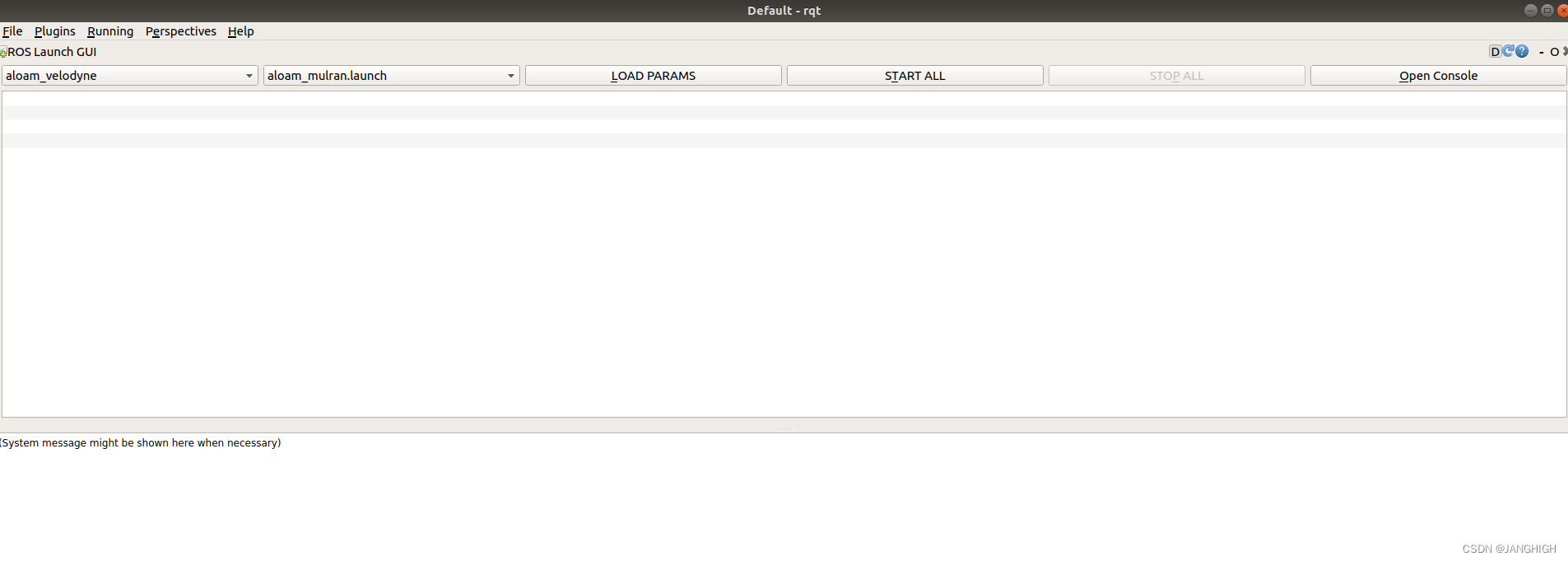
介绍:rqt_gui可以认为是rqt的所有功能的集合
使用:
rosrun rqt_gui rqt_gui
2)rqt_topic
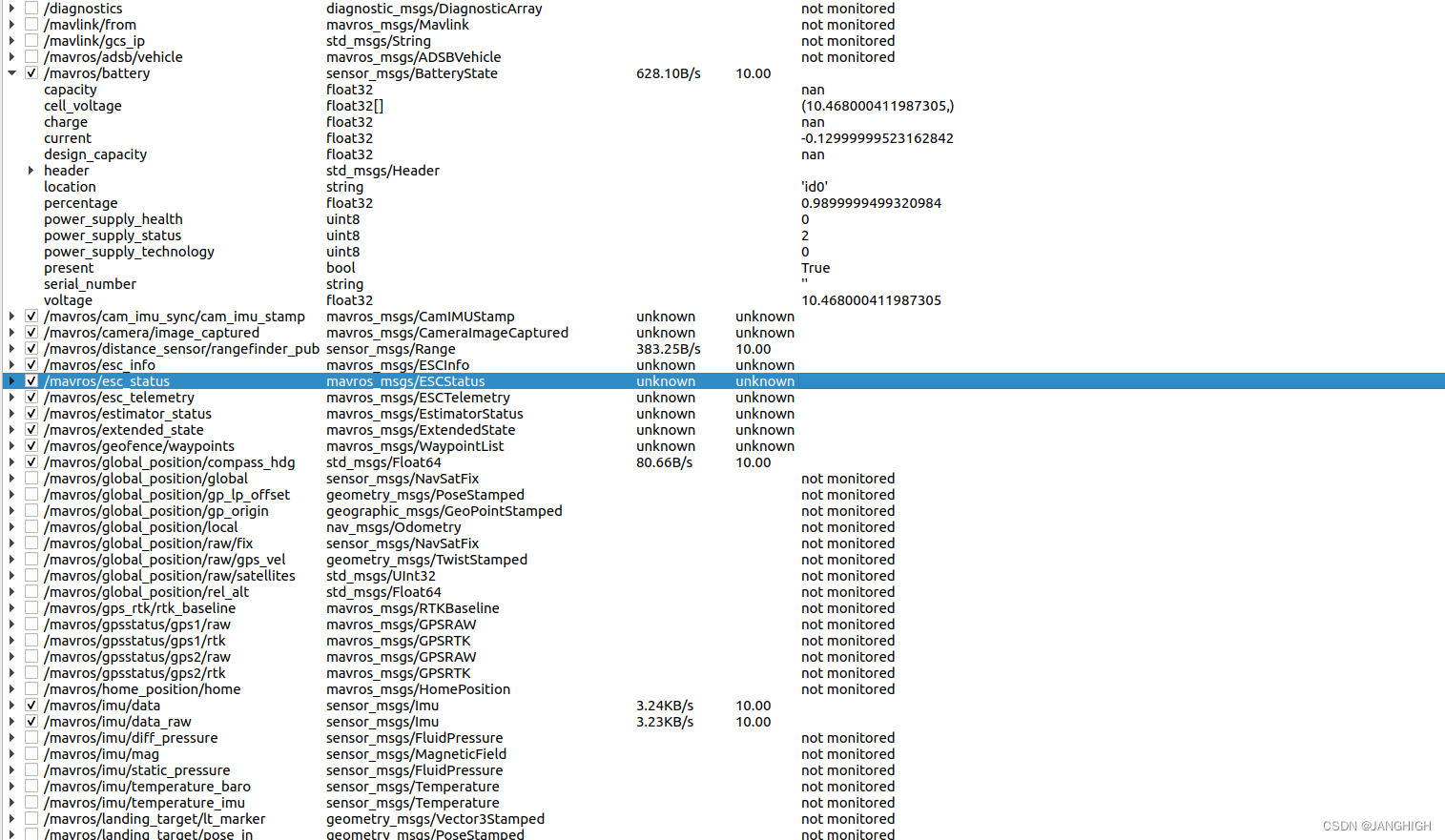
介绍:rqt_topic能够显示出Topic信息以及数值
使用:
rosrun rqt_topic rqt_topic
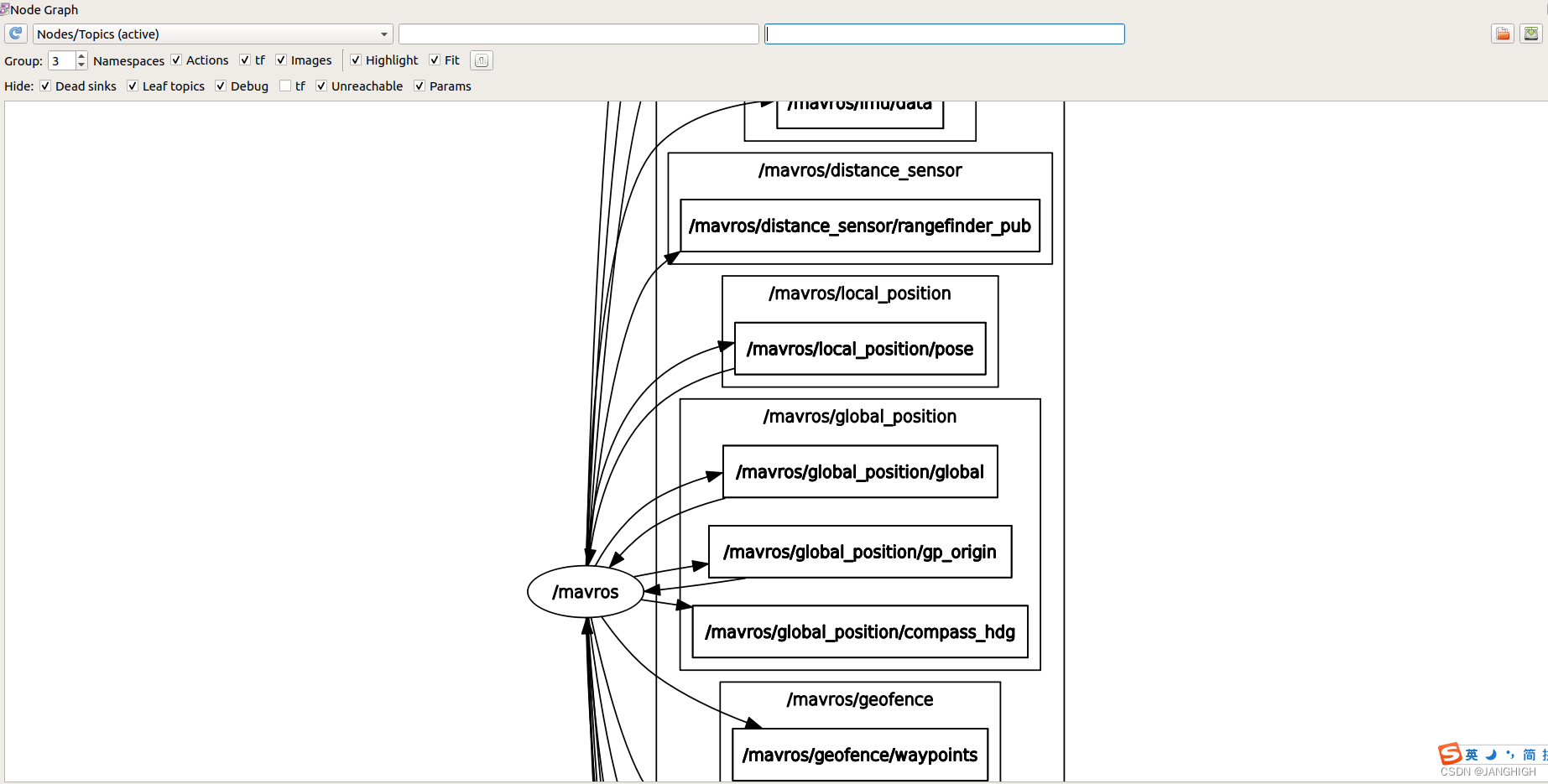
3)rqt_graph
介绍:rqt_graph能够创建一个显示当前系统ROS程序运行情况的动态图形,用图形表示当前活动中的节点与在ROS网络上传输的消息之间的相关性。
使用:
rosrun rqt_graph rqt_graph
4)rqt_plot
rqt_plot可以直接查看topic的数据曲线,非常方便。
介绍:rqt_plot是一个二维数据绘图工具,可以画出topic对应的msg即它将接收到ROS消息的数值绘制到坐标系中。例如,绘制飞控系统的电量等
使用:
rosrun rqt_plot rqt_plot
rqt_plot的启动方式:
roscore
rosrun rqt_plot rqt_plot
下面展示如何在rqt_plot实时显示imu数据。
首先播放录制好的rosbag包
rosbag play <包名>
查看主机接受到的toptic:
rostoptic list
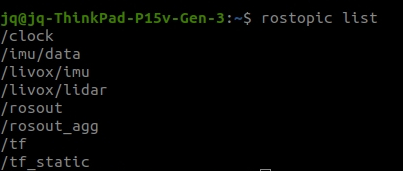
可以看到我们主机端口接受到的toptic话题有/imu/data,下面我们将此话题信息在rqt_plot中显示。打开rqt_plot后的界面如下,我们只需要在Toptic一栏输入我们想要监测的话题变量即可。
查看话题的消息类型和消息类型的信息。
查看话题的消息类型:
rostopic type /imu/data
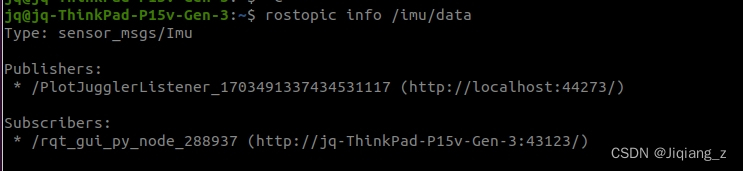
或者使用rostopic info指令查看:
rostopic info /imu/data
查看消息类型信息:
rosmsg info sensor_msgs/Imu
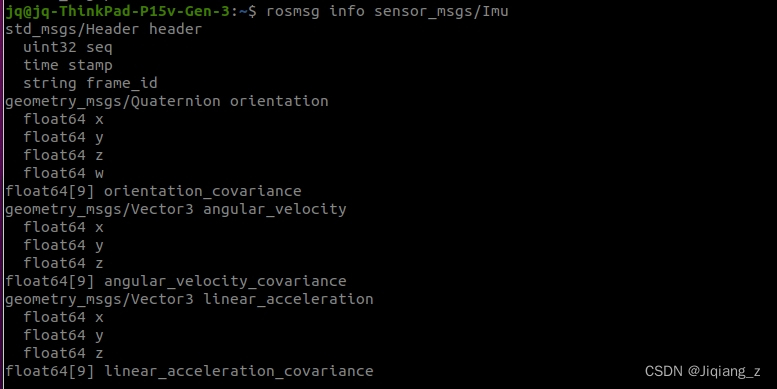
可以看到此IMU发布话题的消息内容有哪些,像是imu的角速度信息angular_velocity和imu的线加速度信息angular_velocity都可以看到。
下面展示在rqt_plot中显示angular_velocity信息和angular_velocity信息。
注意输入Topic时中间都用/符号隔开。输入/imu/data/linear_acceleration,就会自动把所以变量xyz自动加入:
/imu/data/linear_acceleration
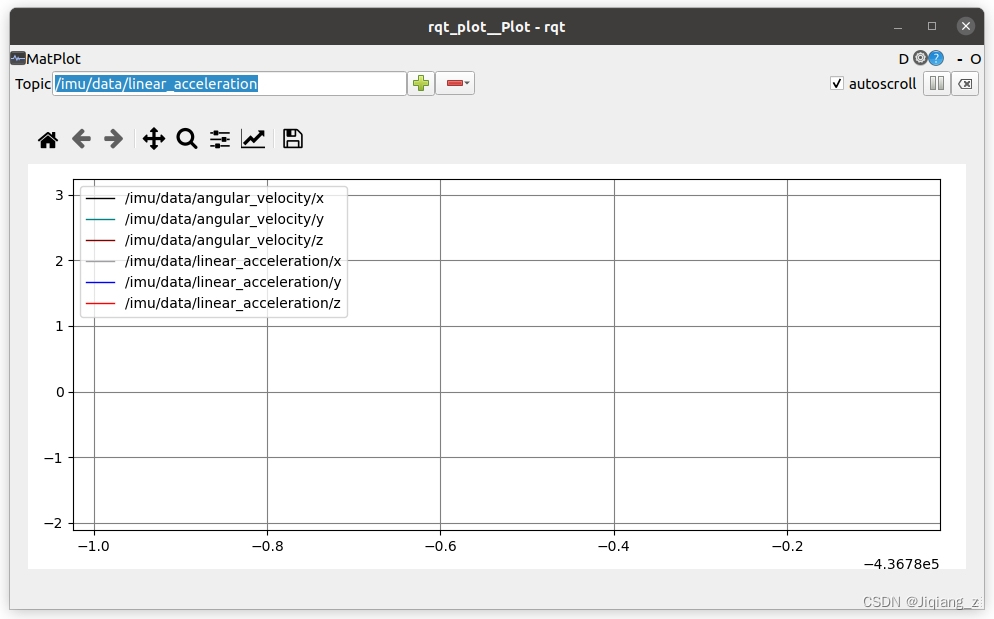
下面开始播放rosbag包后,rqt_plot中就可以正常显示了。
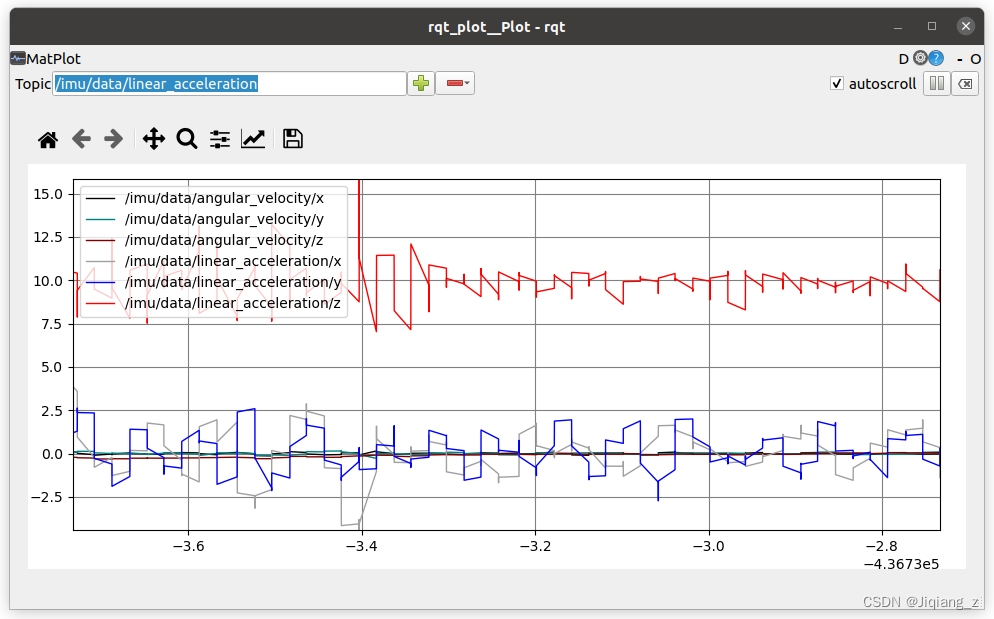
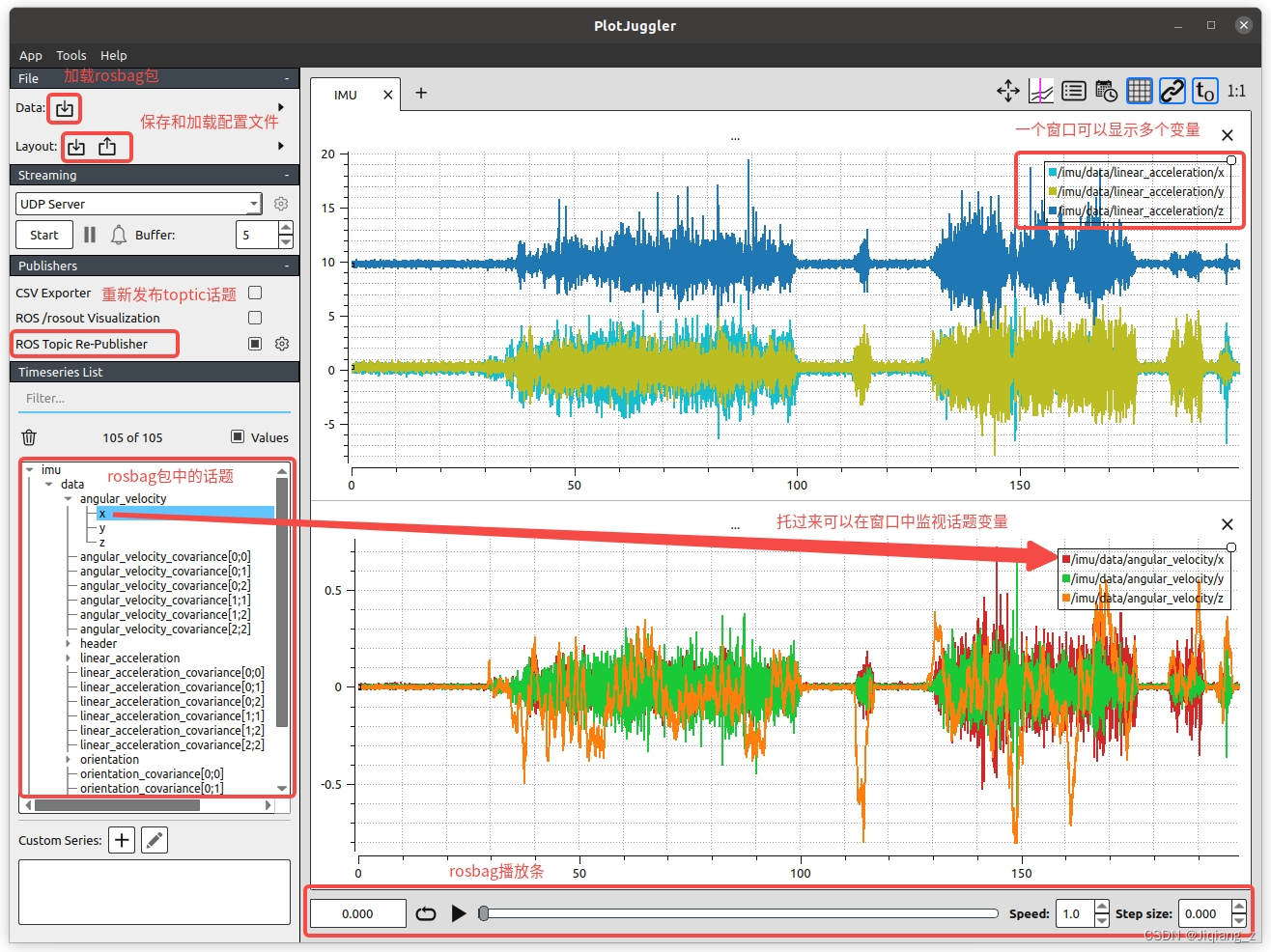
缺陷:不能保存配置文件,功能比较单一,使用体验不如PlotJuggler。
PlotJuggler
安装PlotJuggler:
sudo apt-get install ros-melodic-plotjuggler
安装ros插件(不安装的话应该打不开.bag文件)
sudo apt-get install ros-melodic-plotjuggler-msgs ros-melodic-plotjuggler-ros
启动plotjuggler:
rosrun plotjuggler plotjuggler
界面和功能如下:
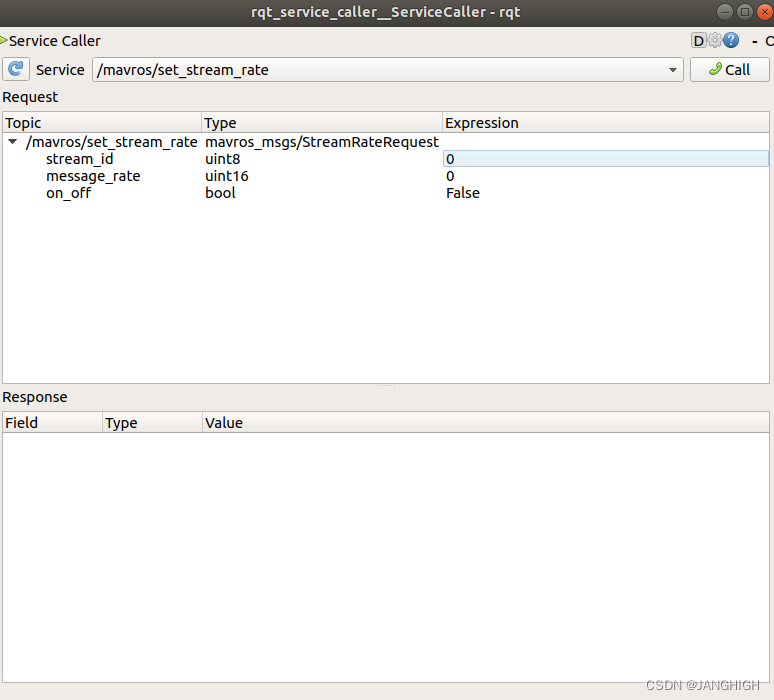
5)rqt_service_caller
介绍:rqt_service_caller服务请求可视化程序,方便服务的请求与接收
使用:
rosrun rqt_service_caller rqt_service_caller
6)rqt_bag
介绍:rqt_bag是一个可以将bag进行可视化的GUI工具,可以play bag包
使用:
rosrun rqt_bag rqt_bag
参考:【ROS学习】- PlotJuggler绘图工具的安装使用-CSDN博客
rosbag包绘图工具——rqt_plot和PlotJuggler_bag包查看曲线图-CSDN博客
rqt的安装及详细介绍的更多相关文章
- Linux下rpm、yum和源码三种安装方式详细介绍
第1章 源码安装 源码包安装会比RPM包安装慢,是因为RPM的软件包是根据特定系统和平台而指定的,经常一种 程序会提供很多RPM包的格式,用户根据系统情况选择适合的RPM包直接安装,而源码包相当于 通 ...
- Anaconda的安装和详细介绍(带图文)
Anacond的介绍 Anaconda指的是一个开源的Python发行版本,其包含了conda.Python等180多个科学包及其依赖项. 因为包含了大量的科学包,Anaconda 的下载文件比较大( ...
- Cloudera Manager (centos)安装详细介绍
文章全部来自:Cloudera Manager (centos)安装详细介绍http://www.aboutyun.com/thread-9190-1-1.html(出处: about云开发) 这里已 ...
- IDEA中的lombok插件安装以及各注解的详细介绍
IDEA中的lombok插件安装以及各注解的详细介绍 其实对于我们来说, 写好实体类后,直接用快捷方式生成get,set方法,还有 构造方法就行了,但是对于字段比较多的, 如果修改一个属性的话,就要再 ...
- [No0000A7]批处理经常用到的变量及批处理>NUL详细介绍
绝对路径是指调用绝对的程序位置的路径,例如: start C:\Windows\test.exe 相对路径是文件改变路径以后还会按照变量的路径所在位置去调用,例如: start %WINDIR%\te ...
- Linux截屏工具scrot用法详细介绍
Scrot是Linux命令行中使用的截图工具,能够进行全屏.选取等操作,下面小编将针对Scrot截图工具的用法给大家做个详细介绍,通过操作实例来学习Scrot的使用. 在Linux中安装Scrot ...
- rocksDB 安装问题简单介绍
前一段时间准备测试rocksdb,按照帖子和官网的例子,在安装过程中遇到一些问题.这里给出的是在Ubuntu下安装python使用的版本. 首先,要感谢这些帖子对我的帮助: 1:http://tech ...
- 【转载】硬盘MBR详细介绍
原文地址:http://blog.chinaunix.net/uid-15007890-id-106892.html 硬盘MBR详细介绍 硬盘是现在计算机上最常用的存储器之一.我们都知道,计 ...
- 详细介绍如何在win7下首次实现通过Git bash向Github提交项目
详细介绍如何在win7下首次实现通过Git bash向Github提交项目 引自:http://jingpin.jikexueyuan.com/article/35944.html 作者: wddoe ...
- 详细介绍windows下使用python pylot进行网站压力测试
windows下使用python进行网站压力测试,有两个必不可少的程序需要安装,一个是python,另一个是pylot.python是一个安装软件,用来运行python程序,而pylot则是pytho ...
随机推荐
- CH07_指针
CH07_指针 指针的基本概念 作用:可以通过指针间接访问内存 描述: 内存编号是从0开始记录的,一般用十六进制数字表示 可以利用指针变量保存地址 指针变量的定义和使用 语法: 数据类型 * 变量名; ...
- 2022年第一天,体验了一把wan(皖)式服务
在新的一年到来之际, 一口君首先祝各位粉丝朋友新年快乐! 心想事成! 事业顺利! 阖家欢乐! 财源广进! 2022年的第一天,一口君带着家人去了躺马鞍山,享受了一下马鞍山的洗浴. 马鞍山桑拿虽然比不上 ...
- 需要多久才能看完linux内核源码?
代码中自由颜如玉!代码中自有黄金屋! 一.内核行数 Linux内核分为CPU调度.内存管理.网络和存储四大子系统,针对硬件的驱动成百上千.代码的数量更是大的惊人. 先说说最早的内核linux 0.11 ...
- k8s新版本使用container而不是docker
使用 Harbor 仓库作为 Kubernetes 集群私有仓库 Harbor 仓库信息 内网地址:hub.rainsc.com IP 地址:192.168.66.100 问题背景 在许多版本的教程中 ...
- 记一次list集合优化
已知某个列表List1有2000条数据,但是因为这个列表的某个字段要从另一个表查询,所以根据一个关联的查询条件查出来的另一个List2有将近75000条数据,然后需要先循环第一个List1,然后循环里 ...
- 常见 URI 协议
mailto mailto 是一种 URI(统一资源标识符)协议,主要用于在 Web 页面中创建电子邮件链接.当用户点击使用 mailto 协议的链接时,系统会自动打开默认的电子邮件客户端,并在新邮件 ...
- [深度学习] 时间序列分析工具TSLiB库使用指北
TSLiB是一个为深度学习时间序列分析量身打造的开源仓库.它提供了多种深度时间序列模型的统一实现,方便研究人员评估现有模型或开发定制模型.TSLiB涵盖了长时预测(Long-term forecast ...
- BooleanBuilder 如何根据自定义列名 模糊查询 使用PathBuilder
// 动态传参 // 1. 声明 PathBuilder:MyTable 为类名称,"myTable" 为首字母小写后的类名 PathBuilder<MyTable> ...
- 阿里云 SLS 模糊查询日志
查询包含test前缀的词 1. 访问 https://sls.console.aliyun.com/lognext/profile 2. 在Project列表中找到对应的sls日志Project 3. ...
- Go runtime 调度器精讲(四):运行 main goroutine
原创文章,欢迎转载,转载请注明出处,谢谢. 0. 前言 皇天不负有心人,终于我们到了运行 main goroutine 环节了.让我们走起来,看看一个 goroutine 到底是怎么运行的. 1. 运 ...