rqt的安装及详细介绍
1. 安装
安装极其简单,不多介绍,直接上命令:
Melodic:
sudo apt-get install ros-melodic-rqt
sudo apt-get install ros-melodic-rqt-common-plugins
Noetic
sudo apt-get install ros-noetic-rqt
sudo apt-get install ros-noetic-rqt-common-plugins
2. 部分工具的功能介绍及使用方法
1)rqt_gui
ROS GUI开发工具(rqt)
rosrun rqt_plot rqt_plot //画出发布在topic上的数据变化图 rosrun rqt_graph rqt_graph //画出node关系图 rosrun rqt_console rqt_console //属于ROS日志框架(logging framework)的一部分,用来显示节点的输出信息 rosrun rqt_reconfigure rqt_reconfigure //参数动态配置工具 rosrun rqt_tf_tree rqt_tf_tree //tf树
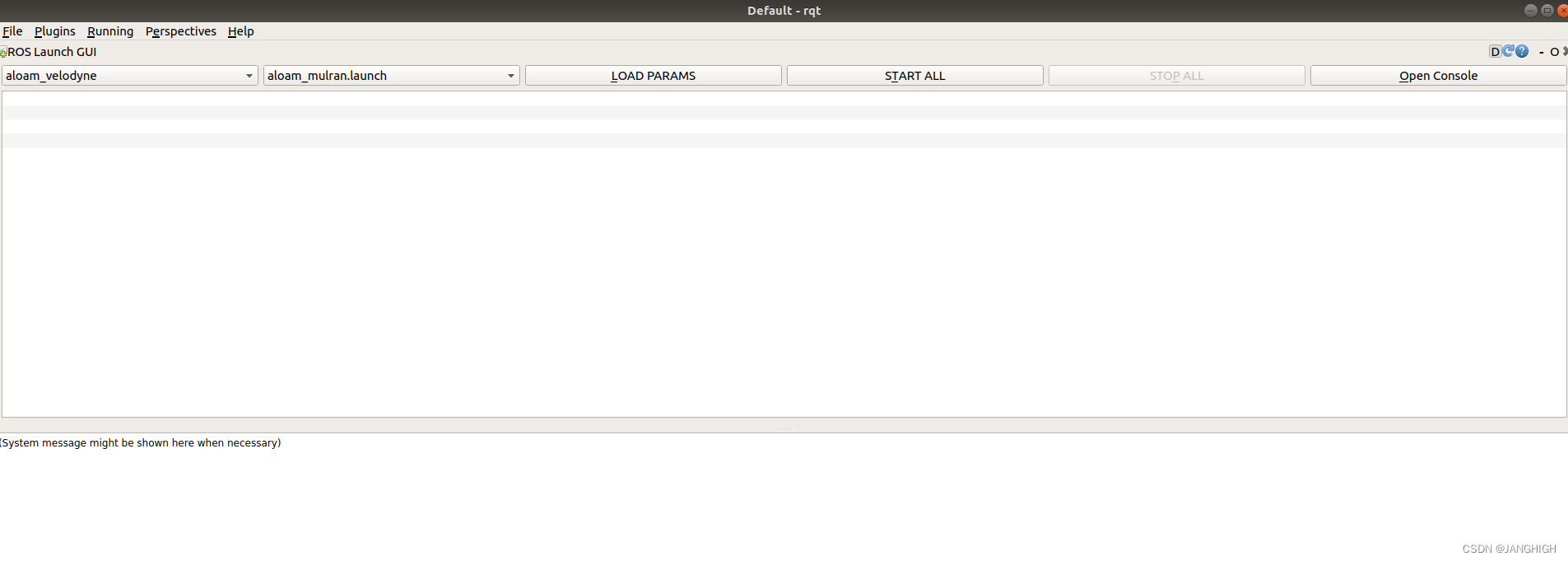
介绍:rqt_gui可以认为是rqt的所有功能的集合
使用:
rosrun rqt_gui rqt_gui
2)rqt_topic
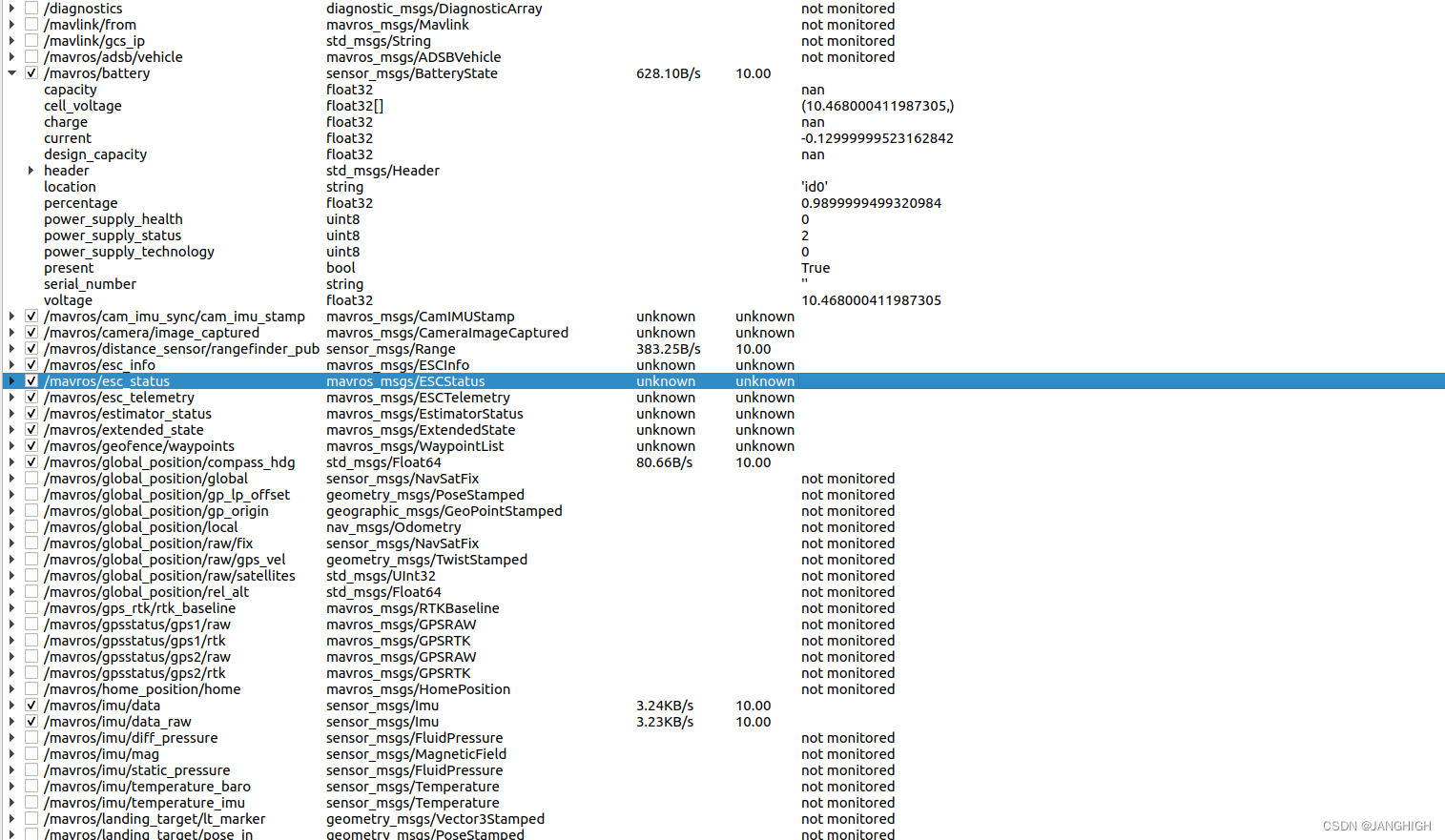
介绍:rqt_topic能够显示出Topic信息以及数值
使用:
rosrun rqt_topic rqt_topic
3)rqt_graph
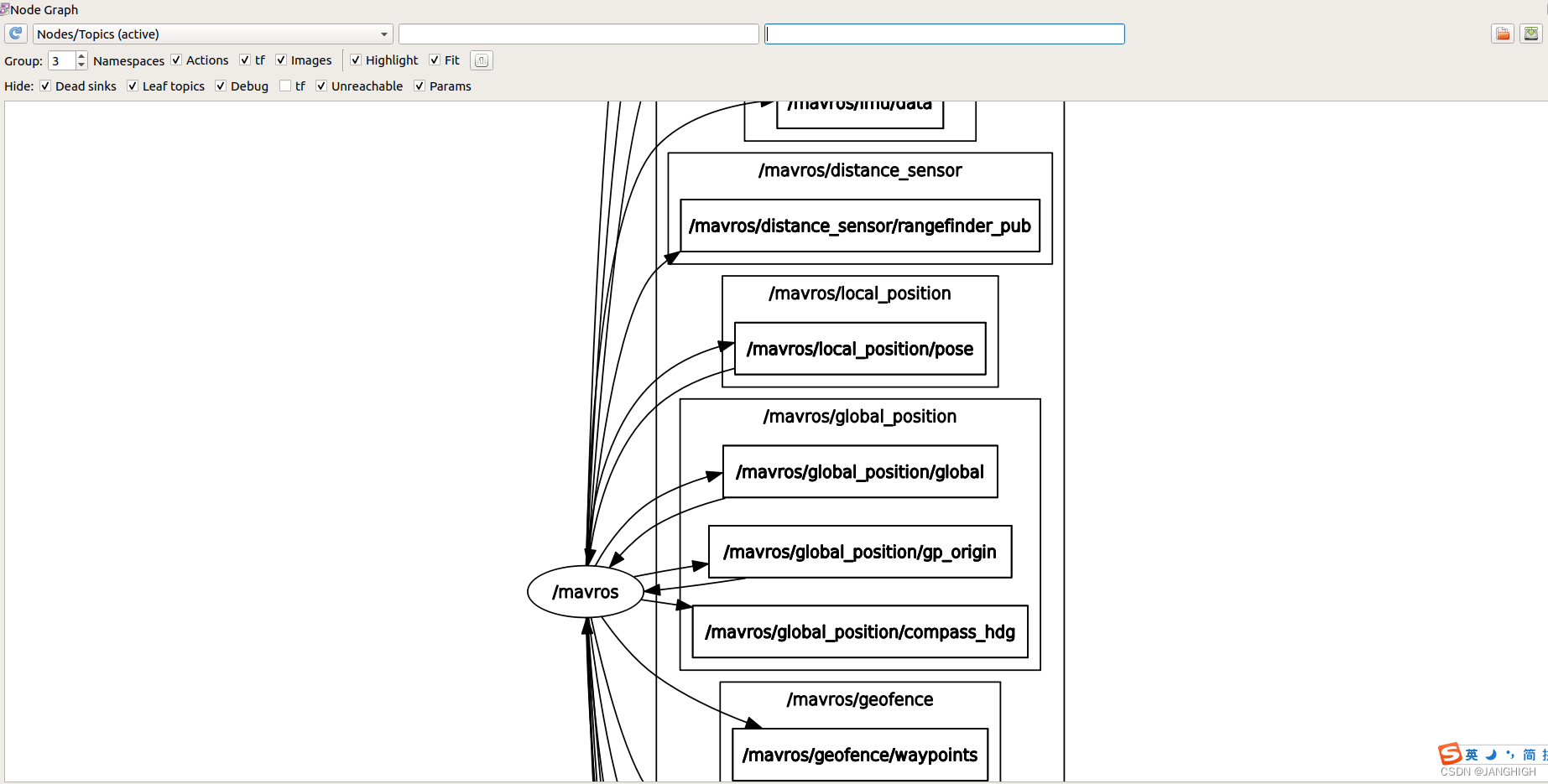
介绍:rqt_graph能够创建一个显示当前系统ROS程序运行情况的动态图形,用图形表示当前活动中的节点与在ROS网络上传输的消息之间的相关性。
使用:
rosrun rqt_graph rqt_graph
4)rqt_plot
rqt_plot可以直接查看topic的数据曲线,非常方便。
介绍:rqt_plot是一个二维数据绘图工具,可以画出topic对应的msg即它将接收到ROS消息的数值绘制到坐标系中。例如,绘制飞控系统的电量等
使用:
rosrun rqt_plot rqt_plot
rqt_plot的启动方式:
roscore
rosrun rqt_plot rqt_plot
下面展示如何在rqt_plot实时显示imu数据。
首先播放录制好的rosbag包
rosbag play <包名>
查看主机接受到的toptic:
rostoptic list
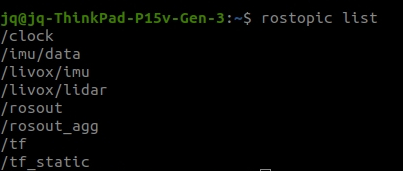
可以看到我们主机端口接受到的toptic话题有/imu/data,下面我们将此话题信息在rqt_plot中显示。打开rqt_plot后的界面如下,我们只需要在Toptic一栏输入我们想要监测的话题变量即可。
查看话题的消息类型和消息类型的信息。
查看话题的消息类型:
rostopic type /imu/data
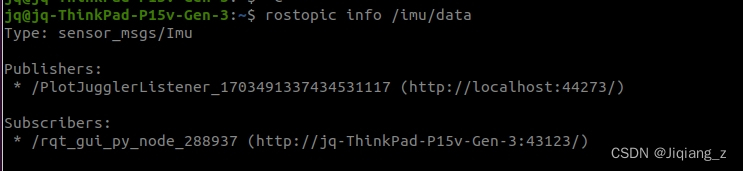
或者使用rostopic info指令查看:
rostopic info /imu/data
查看消息类型信息:
rosmsg info sensor_msgs/Imu
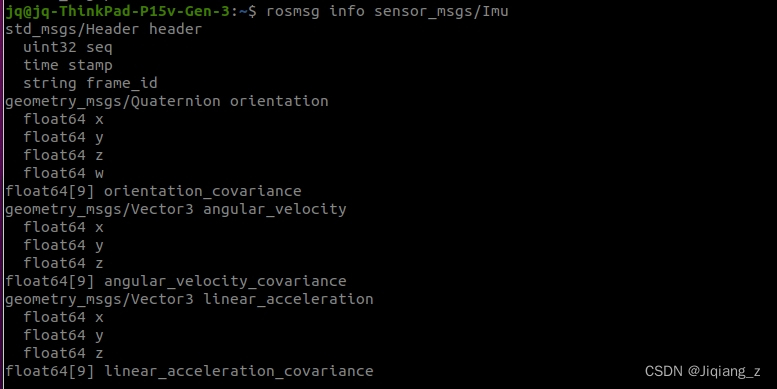
可以看到此IMU发布话题的消息内容有哪些,像是imu的角速度信息angular_velocity和imu的线加速度信息angular_velocity都可以看到。
下面展示在rqt_plot中显示angular_velocity信息和angular_velocity信息。
注意输入Topic时中间都用/符号隔开。输入/imu/data/linear_acceleration,就会自动把所以变量xyz自动加入:
/imu/data/linear_acceleration
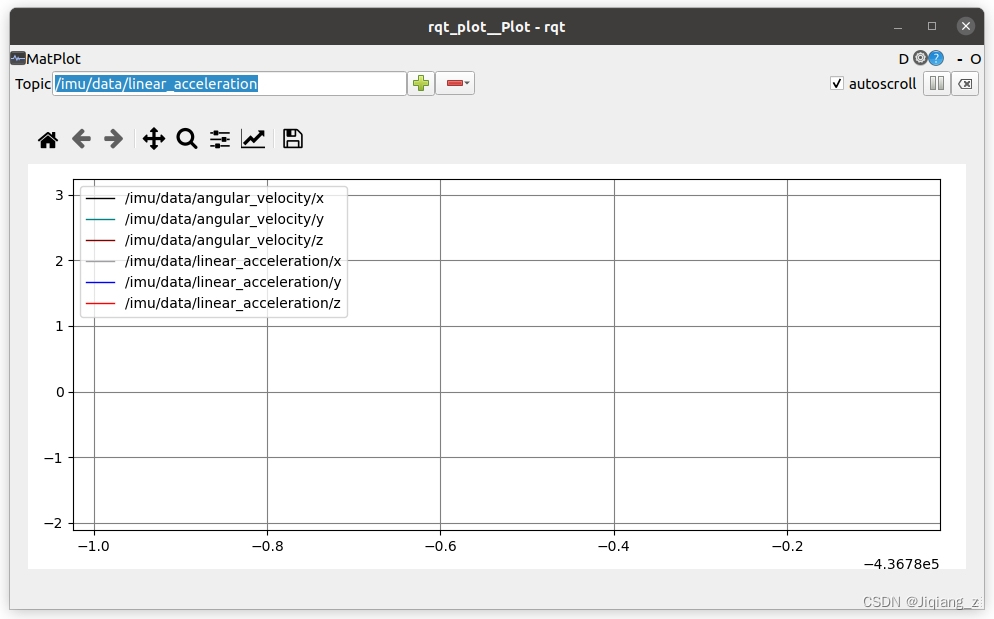
下面开始播放rosbag包后,rqt_plot中就可以正常显示了。
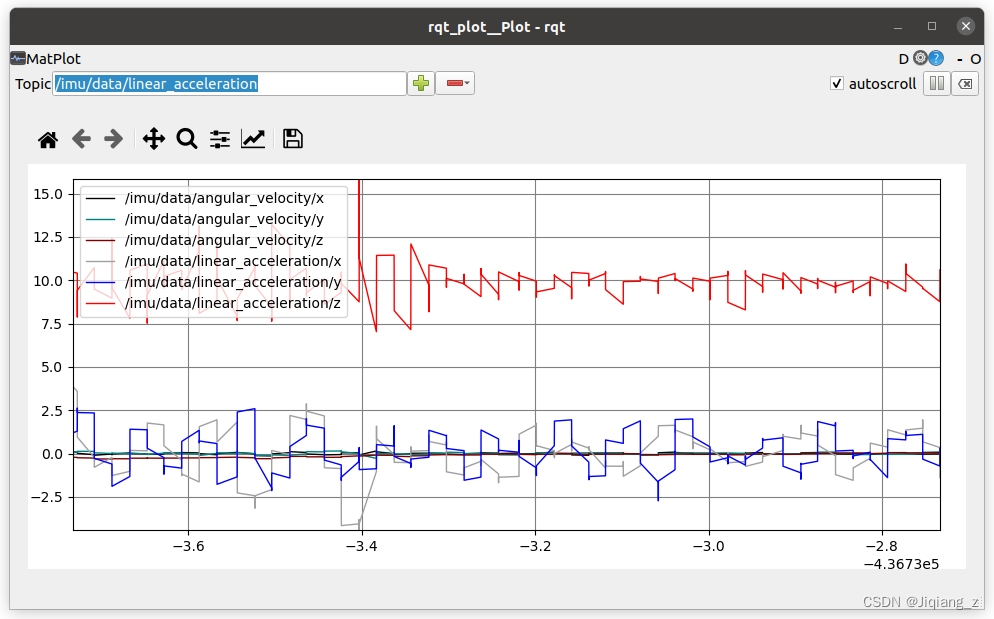
缺陷:不能保存配置文件,功能比较单一,使用体验不如PlotJuggler。
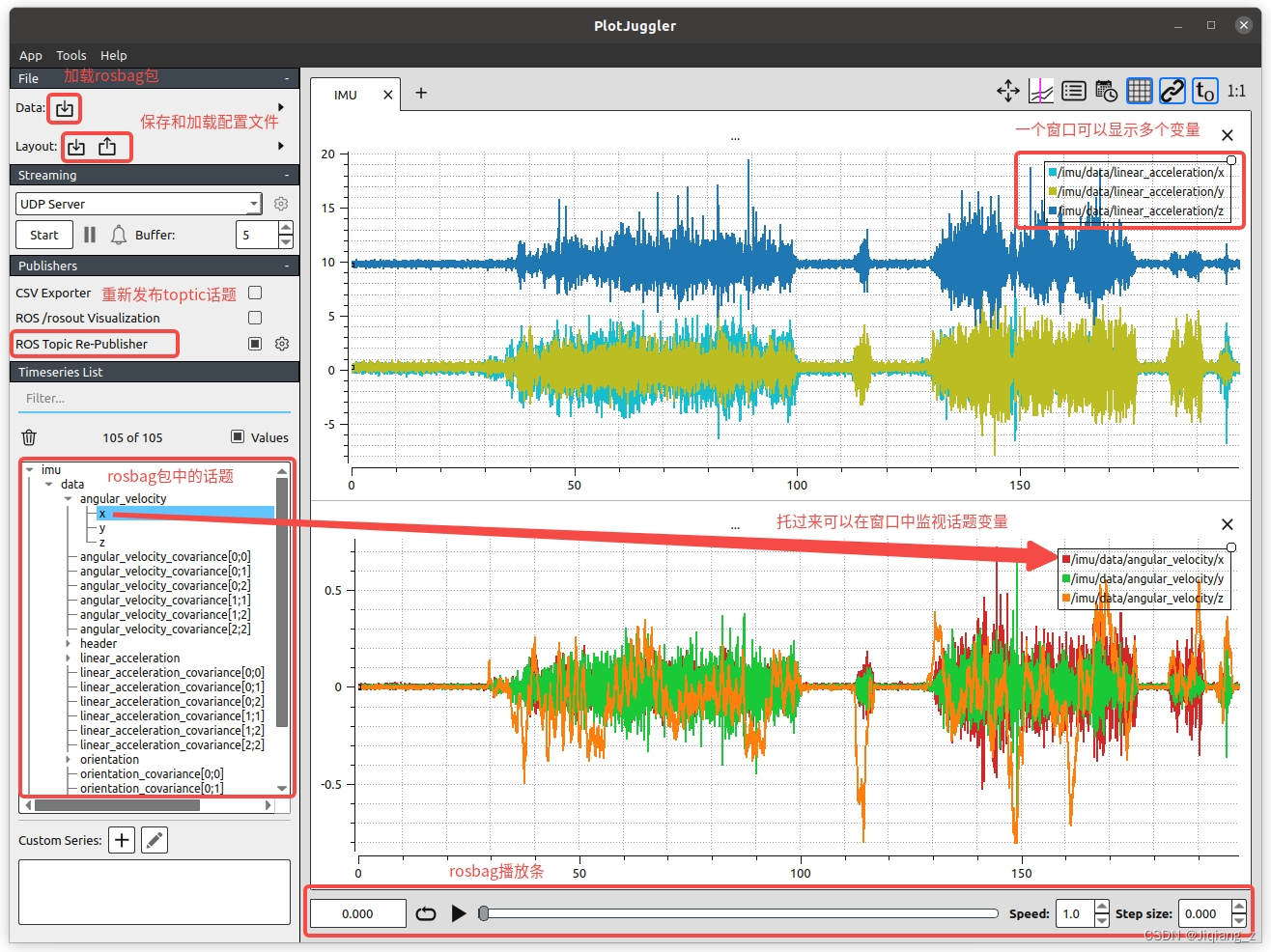
PlotJuggler
安装PlotJuggler:
sudo apt-get install ros-melodic-plotjuggler
安装ros插件(不安装的话应该打不开.bag文件)
sudo apt-get install ros-melodic-plotjuggler-msgs ros-melodic-plotjuggler-ros
启动plotjuggler:
rosrun plotjuggler plotjuggler
界面和功能如下:
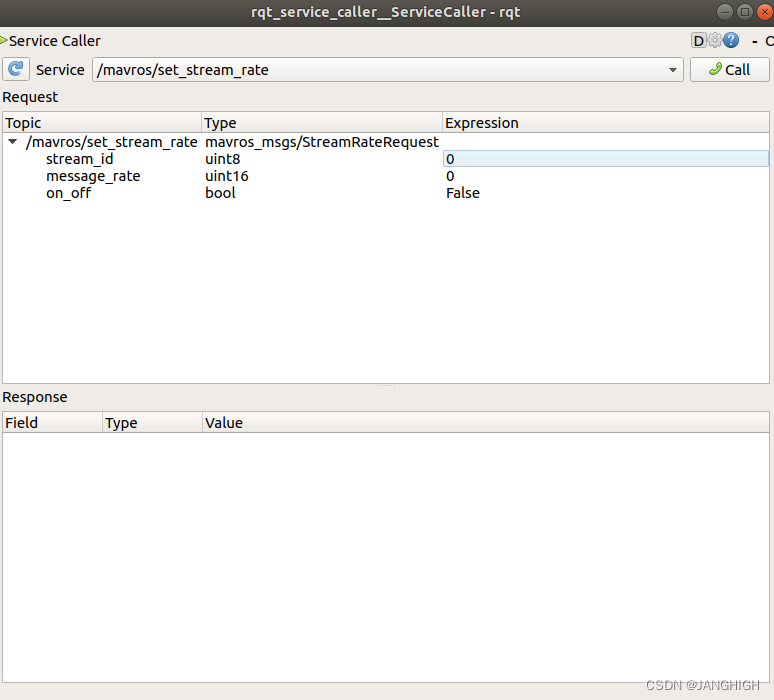
5)rqt_service_caller
介绍:rqt_service_caller服务请求可视化程序,方便服务的请求与接收
使用:
rosrun rqt_service_caller rqt_service_caller
6)rqt_bag
介绍:rqt_bag是一个可以将bag进行可视化的GUI工具,可以play bag包
使用:
rosrun rqt_bag rqt_bag
参考:【ROS学习】- PlotJuggler绘图工具的安装使用-CSDN博客
rosbag包绘图工具——rqt_plot和PlotJuggler_bag包查看曲线图-CSDN博客
rqt的安装及详细介绍的更多相关文章
- Linux下rpm、yum和源码三种安装方式详细介绍
第1章 源码安装 源码包安装会比RPM包安装慢,是因为RPM的软件包是根据特定系统和平台而指定的,经常一种 程序会提供很多RPM包的格式,用户根据系统情况选择适合的RPM包直接安装,而源码包相当于 通 ...
- Anaconda的安装和详细介绍(带图文)
Anacond的介绍 Anaconda指的是一个开源的Python发行版本,其包含了conda.Python等180多个科学包及其依赖项. 因为包含了大量的科学包,Anaconda 的下载文件比较大( ...
- Cloudera Manager (centos)安装详细介绍
文章全部来自:Cloudera Manager (centos)安装详细介绍http://www.aboutyun.com/thread-9190-1-1.html(出处: about云开发) 这里已 ...
- IDEA中的lombok插件安装以及各注解的详细介绍
IDEA中的lombok插件安装以及各注解的详细介绍 其实对于我们来说, 写好实体类后,直接用快捷方式生成get,set方法,还有 构造方法就行了,但是对于字段比较多的, 如果修改一个属性的话,就要再 ...
- [No0000A7]批处理经常用到的变量及批处理>NUL详细介绍
绝对路径是指调用绝对的程序位置的路径,例如: start C:\Windows\test.exe 相对路径是文件改变路径以后还会按照变量的路径所在位置去调用,例如: start %WINDIR%\te ...
- Linux截屏工具scrot用法详细介绍
Scrot是Linux命令行中使用的截图工具,能够进行全屏.选取等操作,下面小编将针对Scrot截图工具的用法给大家做个详细介绍,通过操作实例来学习Scrot的使用. 在Linux中安装Scrot ...
- rocksDB 安装问题简单介绍
前一段时间准备测试rocksdb,按照帖子和官网的例子,在安装过程中遇到一些问题.这里给出的是在Ubuntu下安装python使用的版本. 首先,要感谢这些帖子对我的帮助: 1:http://tech ...
- 【转载】硬盘MBR详细介绍
原文地址:http://blog.chinaunix.net/uid-15007890-id-106892.html 硬盘MBR详细介绍 硬盘是现在计算机上最常用的存储器之一.我们都知道,计 ...
- 详细介绍如何在win7下首次实现通过Git bash向Github提交项目
详细介绍如何在win7下首次实现通过Git bash向Github提交项目 引自:http://jingpin.jikexueyuan.com/article/35944.html 作者: wddoe ...
- 详细介绍windows下使用python pylot进行网站压力测试
windows下使用python进行网站压力测试,有两个必不可少的程序需要安装,一个是python,另一个是pylot.python是一个安装软件,用来运行python程序,而pylot则是pytho ...
随机推荐
- baselines算法库baselines/bench/monitor.py模块分析
baselines算法库baselines/bench/monitor.py模块代码: __all__ = ['Monitor', 'get_monitor_files', 'load_results ...
- Ubuntu Firefox浏览器播放视频报错,提示“需要安装所需的视频编码器”——解决方法:安装视频解码器
给电脑重新做了一个Ubuntu的系统,安装系统的时候没有选择安装第三方软件,结果开机进系统打开firefox浏览器看个电影报错,提示"需要安装所需的视频编码器",效果如下: 解决方 ...
- 面试官:说说MySQL调优?
MySQL 作为关系型数据库的典型代表,其流行程度超越于任何数据库,因此在 Java 面试中,MySQL 是一定会被问到的重要知识点.而在 MySQL 中有一道极其常见的面试题,我们这里系统的来看一下 ...
- 如何使用4G模块通过MQTT协议传输温湿度数据到onenet
本次实验是采用SIM7600CE 4G cat4 模块进行操作的,本模块支持GNSS定位功能.也可以采用别的4G模块,只要支持TCP传输就行.本模块支持的AT命令相当强大,拥有TCP&UDP命 ...
- canfestival源码下载教程
先进入官网的这个页面 https://canfestival.org/code.html.en 点击箭头所指的地方 选择日期最新的点击下载
- 【Mac】之安装VM虚拟机并安装centos7系统
参考文章:<Mac 安装VMware Fusion虚拟机> 一.安装VMware Fusion 首先下载Mac版VMware虚拟机: 链接:https://pan.baidu.com/s/ ...
- smiley-http-proxy-servlet 转发https至 http网页访问
转发 https -> http 网页访问 正常的smiley-http-proxy-servlet 写法, 可以转发https接口到http,http接口到http,http访问转发至http ...
- Angular Material 18+ 高级教程 – Custom Themes for Material Design 3 (自定义主题 Material 3)
v18 更新重要说明 从 Angular Material v18 开始,默认使用的是 Material 3 Design (简称 M3). 而且是正式版,不再是 experimental previ ...
- Python 潮流周刊#69:是时候停止使用 Python 3.8了(摘要)
本周刊由 Python猫 出品,精心筛选国内外的 250+ 信息源,为你挑选最值得分享的文章.教程.开源项目.软件工具.播客和视频.热门话题等内容.愿景:帮助所有读者精进 Python 技术,并增长职 ...
- MyBatis——案例——环境准备
配置文件完成增删改查 准备环境 数据库表 tb_brand -- 创建tb_brand表 create table tb_brand( id int primary k ...