HDU 4576 Robot (概率 & 期望)
Robot
Time Limit: 8000/4000 MS (Java/Others) Memory Limit: 102400/102400 K (Java/Others)
Total Submission(s): 779 Accepted Submission(s): 304
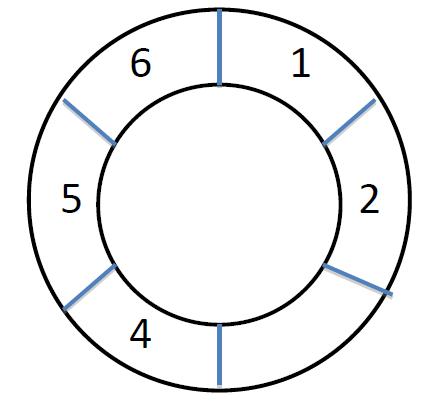
At first the robot is in cell 1. Then Michael uses a remote control to send m commands to the robot. A command will make the robot walk some distance. Unfortunately the direction part on the remote control is broken, so for every command the robot will chose a direction(clockwise or anticlockwise) randomly with equal possibility, and then walk w cells forward.
Michael wants to know the possibility of the robot stopping in the cell that cell number >= l and <= r after m commands.
Each test case contains several lines.
The first line contains four integers: above mentioned n(1≤n≤200) ,m(0≤m≤1,000,000),l,r(1≤l≤r≤n).
Then m lines follow, each representing a command. A command is a integer w(1≤w≤100) representing the cell length the robot will walk for this command.
The input end with n=0,m=0,l=0,r=0. You should not process this test case.
1
5 2 4 4
1
2
0 0 0 0
0.2500
题意:给你一个n,m,l,r。n个格子围成一个圈,一个机器人从第一个格子开始,经过m个步,每个步知道走几格,但是不知道方向,问你最后在l到r之间的概率。
#include<iostream>
#include<cstdio>
#include<cstring> using namespace std; const int N=; int n,m,l,r;
double dp[][N]; int main(){ //freopen("input.txt","r",stdin); while(~scanf("%d%d%d%d",&n,&m,&l,&r)){
if(n== && m== && l== && r==)
break;
for(int i=;i<=n;i++)
dp[][i]=;
dp[][]=;
int x,cur=;
while(m--){
scanf("%d",&x);
for(int i=;i<n;i++)
dp[cur^][i]=;
for(int i=;i<n;i++){
if(dp[cur][i]==)
continue;
dp[cur^][((i-x)%n+n)%n]+=0.5*dp[cur][i];
dp[cur^][(i+x)%n]+=0.5*dp[cur][i];
}
cur^=;
}
double ans=;
for(int i=l-;i<r;i++) //注意这里的范围
ans+=dp[cur][i];
printf("%.4lf\n",ans);
}
return ;
}
HDU 4576 Robot (概率 & 期望)的更多相关文章
- HDU 4576 Robot(概率dp)
题目 /*********************复制来的大致题意********************** 有N个数字,M个操作, 区间L, R. 然后问经过M个操作后落在[L, R]的概率. * ...
- HDU 4576 Robot (概率DP)
暴力DP求解太卡时间了...........写挫一点就跪了 //hdu robot #include <cstdio> #include <iostream> #include ...
- HDU 4576 Robot (很水的概率题)
Robot Time Limit: 8000/4000 MS (Java/Others) Memory Limit: 102400/102400 K (Java/Others)Total Sub ...
- HDU 4576 Robot(概率dp)
Robot Time Limit: 8000/4000 MS (Java/Others) Memory Limit: 102400/102400 K (Java/Others)Total Sub ...
- HDU - 4576 Robot(概率dp+滚动数组)
题意:所有的格子围成一个圈,标号为1~n,若从格子1出发,每次指令告知行走的步数,但可能逆时针也可能顺时针走,概率都是1/2,那么问走了m次指令后位于格子l~r(1≤l≤r≤n)的概率. 分析: 1. ...
- HDU 4576 简单概率 + 滚动数组DP(大坑)
题目链接:http://acm.hdu.edu.cn/showproblem.php?pid=4576 坑大发了,居然加 % 也会超时: #include <cstdio> #includ ...
- HDU 4576 Robot
思路 概率dp 既然是求概率,顺推 显然有转移\(dp[i][j]=dp[i-1][j-w]/2+dp[i-1][w]/2\) 然后是环,注意特判一下 环上不要用取模处理循环的情况,会被卡常 代码 # ...
- hdu 4576(简单概率dp | 矩阵优化)
艰难的一道题,体现出菜菜的我... 首先,先吐槽下. 这题到底出题人是怎么想的,用普通概率dp水过??? 那为什么我概率dp写的稍微烂点就一直tle? 感觉很不公平.大家算法都一致,因为我程序没有那 ...
- 【BZOJ-1419】Red is good 概率期望DP
1419: Red is good Time Limit: 10 Sec Memory Limit: 64 MBSubmit: 660 Solved: 257[Submit][Status][Di ...
随机推荐
- Ubuntu16.04中Docker的卸载
1:利用sudo apt-get remove docker 进行卸载提示如下,docker未按照所以不能卸载 2:再次查看docker版本,依然还在 3:原因是安装的时候安装的是docker-ce版 ...
- Direct2D教程V——位图(Bitmap)和位图笔刷(BitmapBrush)
目前博客园中成系列的Direct2D的教程有 1.万一的 Direct2D 系列,用的是Delphi 2009 2.zdd的 Direct2D 系列,用的是VS中的C++ 3.本文所在的 Direct ...
- maven中的snapshot来源与注意事项
maven中的snapshot来源与注意事项 (2012-04-23 15:37:48) 转载▼ 标签: 杂谈 分类: java maven的依赖管理是基于版本管理的,在maven2之后,把版本管理细 ...
- crm创建启用停用用户
public static readonly string entityName = "systemuser"; public Guid userId = Guid ...
- android中实现本地广播
上一篇文章实现了自定义广播: android中实现自定义广播 自定义广播允许被其他应用使用,有些情况下只允许广播在本应用范围内使用,可以用本地广播的方式实现 下面是实现的代码部分,MainActivi ...
- 【转】java并发编程系列之ReadWriteLock读写锁的使用
前面我们讲解了Lock的使用,下面我们来讲解一下ReadWriteLock锁的使用,顾明思义,读写锁在读的时候,上读锁,在写的时候,上写锁,这样就很巧妙的解决synchronized的一个性能问题:读 ...
- 自定义控件之万能Repeater源码
using System.ComponentModel; using System.Web.UI; [assembly: TagPrefix("Jinlong.Control", ...
- 微信小程序 - 分包加载(分包使用)
使用分包(建议主包添加跳转路径,分包放内容) 在app.json配置"subpackages" 在pages同级目录新建文件夹以及文件 打包原则 声明 subpackages 后, ...
- HDS Truecopy实现原理及项目的选择-诸多案例
copy from:http://www.eygle.com/archives/2009/05/hds_truecopy_dataguard.html 诸多案例:http://wenku.baidu. ...
- Python 字典(联合内存、联合数组)
字典 Python有一个内建数据类型是字典(Dictionaries).字典在某些语言中可能称为“联合内存”("associative memories'')或“联合数组”("as ...