logistic回归学习
logistic回归是一种分类方法,用于两分类的问题,其基本思想为:
- 寻找合适的假设函数,即分类函数,用来预测输入数据的结果;
- 构造损失函数,用来表示预测的输出结果与训练数据中实际类别之间的偏差;
- 最小化损失函数,从而获得最优的模型参数。
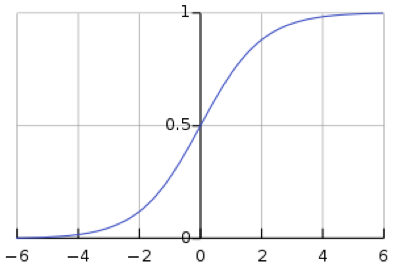
首先来看一下sigmoid函数:
\(g(x)=\frac{1}{1-e^{x}}\)
它的函数图像为:
logistic回归中的假设函数(分类函数):
\(h_{\theta }(x)=g(\theta ^{T}x)=\frac{1}{1+e^{-\theta ^{T}x}}\)
解释:
\(\theta \) —— 我们在后面要求取的参数;
\(T\) —— 向量的转置,默认的向量都是列向量;
\(\theta ^{T}x\) —— 列向量\(\theta\)先转置,然后与\(x\)进行点乘,比如:
\(\begin{bmatrix}1\\ -1\\ 3\end{bmatrix}^{T}\begin{bmatrix}1\\ 1\\ -1\end{bmatrix} = \begin{bmatrix}1 & -1 & 3\end{bmatrix}\begin{bmatrix}1\\ 1\\ -1\end{bmatrix}=1\times 1+(-1)\times1+3\times(-1) = -3\)
logistic分类有线性边界和非线性边界两种:
线性边界形式为:\(\theta_{0}+\theta_{1}x_{1}+\cdots+\theta_{n}x_{n}=\sum_{i=0}^{n}\theta_{i}x_{i}=\theta^{T}x\)
非线性边界的形式为:\(\theta_{0}+\theta_{1}x_{1}+\theta_{2}x_{2}+\theta_{3}x_{1}^{2}+\theta_{4}x_{2}^{2}\)
在概率上计算输入\(x\)结果为1或者0的概率分别为:
\(P(y=1|x;\theta)=h_{\theta}(x)\)
\(P(y=0|x;\theta)=1-h_{\theta}(x)\)
损失函数被定义为:\(J(\theta)=\frac{1}{m}\sum_{m}^{i=1}cost(h_{\theta}(x^{i}), y^{i})\)
其中:
这里\(m\)是所有训练样本的数目;
\(cost(h_{\theta}(x), y)=\left\{\begin{matrix}\ \ \ \ \ -log(h_{\theta}(x)) \ \ \ if\ y=1\\ -log(1-h_{\theta}(x)) \ \ \ if \ y=0\end{matrix}\right.\)
\(cost\)的另一种形式是:\(cost(h_{\theta}(x), y)=-y\times log(h_{\theta}(x))-(1-y)\times log(1-h_{\theta}(x))\)
将\(cost\)代入到\(J(\theta)\)中可以得到损失函数如下:
\(J(\theta)=-\frac{1}{m}[\sum_{m}^{i=1}y^{(i)}logh_{\theta}(x^{(i)})+(1-y^{(i)})log(1-h_{\theta}(x^{(i)}))]\)
梯度法求\(J(\theta)\)的最小值
\(\theta\)的更新过程如下:
\(\theta_{j}:=\theta_{j}-\alpha\frac{\partial }{\partial\theta_{j}}J(\theta),\ \ \ (j=0\cdots n)\)
其中:\(\alpha\)是学习步长。
\(\begin{align*} \frac{\partial }{\partial\theta_{j}}J(\theta) &= -\frac{1}{m}\sum_{m}^{i=1}\left ( y^{(i)}\frac{1}{h_{\theta}(x^{(i)})} \frac{\partial }{\partial\theta_{j}}h_{\theta}(x^{(i)})-(1-y^{(i)})\frac{1}{1-h_{\theta}(x^{(i)})}\frac{\partial }{\partial\theta_{j}}h_{\theta}(x^{(i)})\right ) \\ &=-\frac{1}{m}\sum_{m}^{i=1}\left ( y^{(i)}\frac{1}{g\left ( \theta^{T}x^{(i)} \right )}-\left ( 1-y^{(i)} \right )\frac{1}{1-g\left ( \theta^{T}x^{(i)} \right )} \right )\frac{\partial }{\partial\theta_{j}}g\left ( \theta^{T}x^{(i)} \right ) \\ &= -\frac{1}{m}\sum_{m}^{i=1}\left ( y^{(i)}\frac{1}{g\left ( \theta^{T}x^{(i)} \right )}-\left ( 1-y^{(i)} \right )\frac{1}{1-g\left ( \theta^{T}x^{(i)} \right )} \right ) g\left ( \theta^{T}x^{(i)} \right ) \left ( 1-g\left ( \theta^{T}x^{(i)} \right ) \right ) \frac{\partial }{\partial\theta_{j}}\theta^{T}x^{(i)} \end{align*}\)
\(\begin{align*} \frac{\partial }{\partial\theta_{j}}J(\theta) &= -\frac{1}{m}\sum_{m}^{i=1}\left ( y^{(i)}\left ( 1-g\left ( \theta^{T}x^{(i)} \right ) \right )-\left ( 1-y^{(i)} \right )g\left ( \theta^{T}x^{(i)}\right) \right )x_{j}^{\left (i \right )} \\ &= -\frac{1}{m}\sum_{m}^{i=1}\left ( y^{(i)} -g\left ( \theta^{T}x^{(i)}\right) \right )x_{j}^{\left (i \right )} \\ &=-\frac{1}{m}\sum_{m}^{i=1}\left ( y^{(i)} -h_{\theta}\left ( x^{(i)}\right) \right )x_{j}^{\left (i \right )} \\&=\frac{1}{m}\sum_{m}^{i=1}\left ( h_{\theta}\left ( x^{(i)}\right)-y^{(i)} \right )x_{j}^{\left (i \right )} \end{align*}\)
把偏导代入更新过程那么可以得到:
\(\theta_{j}:=\theta_{j}-\alpha\frac{1}{m}\sum_{m}^{i=1}\left ( h_{\theta}\left ( x^{(i)}\right)-y^{(i)} \right )x_{j}^{\left (i \right )}\)
学习步长\(\alpha\)通常是一个常量,然后省去\(\frac{1}{m}\),可以得到最终的更新过程:
\(\theta_{j}:=\theta_{j}-\alpha\sum_{m}^{i=1}\left ( h_{\theta}\left ( x^{(i)}\right)-y^{(i)} \right )x_{j}^{\left (i \right )}, \ \ \ \ \left ( j=0\cdots n \right )\)
向量化梯度
训练样本用矩阵来描述就是:
\(X= \begin{bmatrix} x^{(1)}\\ x^{(2)}\\ \cdots \\ x^{(m)}\end{bmatrix}=\begin{bmatrix} x_{0}^{(1)} & x_{1}^{(1)} & \cdots & x_{n}^{(1)}\\ x_{0}^{(2)} & x_{1}^{(2)} & \cdots & x_{n}^{(2)}\\ \cdots & \cdots & \cdots & \cdots \\ x_{0}^{(m)} & x_{1}^{(m)} & \cdots & x_{n}^{(m)} \end{bmatrix}, \ \ Y=\begin{bmatrix} y^{\left ( 1 \right )}\\ y^{\left ( 2 \right )}\\ \cdots \\ y^{\left ( m \right )}\end{bmatrix}\)
参数\(\theta\)的矩阵形式为:
\(\Theta=\begin{bmatrix} \theta^{\left ( 1 \right )}\\ \theta^{\left ( 2 \right )}\\ \cdots \\ \theta^{\left ( m \right )}\end{bmatrix}\)
先计算\(X\cdot \Theta\),并记结果为\(A\):
\(A=X\cdot\Theta\),其实就是矩阵的乘法
再来求取向量版的误差\(E\):
\(E=h_{\Theta}\left ( X \right )-Y=\begin{bmatrix} g\left ( A^{1} \right )-y^{\left (1 \right )}\\ g\left ( A^{1} \right )-y^{\left (1 \right )}\\ \cdots \\ g\left ( A^{1} \right )-y^{\left (1 \right )}\end{bmatrix} = \begin{bmatrix} e^{(1)}\\ e^{(2)}\\ \cdots \\ e^{(m)}\end{bmatrix}\)
当\(j=0\)时的更新过程为:
\(\begin{align*} \theta_{0}&=\theta_{0}-\alpha\sum_{m}^{i=1}\left ( h_{\theta}\left ( x^{(i)}\right)-y^{(i)} \right )x_{0}^{\left (i \right )}, \ \ \ \ \left ( j=0\cdots n \right ) \\ &= \theta_{0}-\alpha\sum_{m}^{i=1}e^{\left ( i \right )}x_{0}^{\left ( i \right )} \\ &= \theta_{0}-\alpha \begin{bmatrix} x_{0}^{\left ( 1 \right )} & x_{0}^{\left ( 2 \right )} & \cdots & x_{m}^{\left ( 0 \right )} \end{bmatrix} \cdot E \end{align*}\)
对于\(\theta_{j}\)同理可以得到:
\(\theta_{j} = \theta_{j}-\alpha \begin{bmatrix} x_{j}^{\left ( 1 \right )} & x_{j}^{\left ( 2 \right )} & \cdots & x_{j}^{\left ( m \right )} \end{bmatrix} \cdot E\)
用矩阵来表达就是:
\(\begin{align*}\begin{bmatrix} \theta_{0}\\ \theta_{1}\\ \cdots \\ \theta_{n}\end{bmatrix} &= \begin{bmatrix} \theta_{0}\\ \theta_{1}\\ \cdots \\ \theta_{n}\end{bmatrix} - \alpha \cdot \begin{bmatrix} x_{0}^{\left ( 1 \right )} & x_{0}^{\left ( 2 \right )} & \cdots & x_{0}^{\left (m \right )}\\ x_{1}^{\left ( 1 \right )} & x_{1}^{\left ( 2 \right )} & \cdots & x_{1}^{\left (m \right )}\\ \cdots & \cdots & \cdots & \cdots\\ x_{n}^{\left ( 1 \right )} & x_{n}^{\left ( 2 \right )} & \cdots & x_{n}^{\left (m \right )}\\ \end{bmatrix} \cdot E \\ &= \theta - \alpha \cdot x^{T} \cdot E \end{align*}\)
以上就三个步骤:
1. 求取模型的输出:\(A=X \cdot \Theta\)
2. sigmoid映射之后求误差:\(E=g\left ( A \right )-Y\)
3. 利用推导的公式更新\(\Theta\),\(\Theta:=\Theta-\alpha \cdot X^{T} \cdot E\),然后继续回到第一步继续。
logistic回归学习的更多相关文章
- 机器学习5—logistic回归学习笔记
机器学习实战之logistic回归 test5.py #-*- coding:utf-8 import sys sys.path.append("logRegres.py") fr ...
- 机器学习实战(Machine Learning in Action)学习笔记————05.Logistic回归
机器学习实战(Machine Learning in Action)学习笔记————05.Logistic回归 关键字:Logistic回归.python.源码解析.测试作者:米仓山下时间:2018- ...
- 《机器学习实战》学习笔记第五章 —— Logistic回归
一.有关笔记: 1..吴恩达机器学习笔记(二) —— Logistic回归 2.吴恩达机器学习笔记(十一) —— Large Scale Machine Learning 二.Python源码(不带正 ...
- 机器学习实战3:逻辑logistic回归+在线学习+病马实例
本文介绍logistic回归,和改进算法随机logistic回归,及一个病马是否可以治愈的案例.例子中涉及了数据清洗工作,缺失值的处理. 一 引言 1 sigmoid函数,这个非线性函数十分重要,f( ...
- SAS学习笔记29 logistic回归
变量筛选 当对多个自变量建立logistic回归模型时,并不是每一个自变量对模型都有贡献.通常我们希望所建立的模型将具有统计学意义的自变量都包含在内,而将没有统计学意义的自变量排除在外,即进行变量筛选 ...
- 吴恩达深度学习:2.12向量化logistic回归
1.不使用任何for循环用梯度下降实现整个训练集的一步迭代. (0)我们已经讨论过向量化如何显著加速代码,在这次视频中我们会设计向量化是如何实现logistic回归,这样酒桶同时处理m个训练集,来实现 ...
- 神经网络、logistic回归等分类算法简单实现
最近在github上看到一个很有趣的项目,通过文本训练可以让计算机写出特定风格的文章,有人就专门写了一个小项目生成汪峰风格的歌词.看完后有一些自己的小想法,也想做一个玩儿一玩儿.用到的原理是深度学习里 ...
- 如何在R语言中使用Logistic回归模型
在日常学习或工作中经常会使用线性回归模型对某一事物进行预测,例如预测房价.身高.GDP.学生成绩等,发现这些被预测的变量都属于连续型变量.然而有些情况下,被预测变量可能是二元变量,即成功或失败.流失或 ...
- Logistic回归分类算法原理分析与代码实现
前言 本文将介绍机器学习分类算法中的Logistic回归分类算法并给出伪代码,Python代码实现. (说明:从本文开始,将接触到最优化算法相关的学习.旨在将这些最优化的算法用于训练出一个非线性的函数 ...
随机推荐
- MYSQL-使用mysqldump创建数据库快照
对已经有数据的mysql库创建主从的时候,可以使用mysqldump创建数据库快照 #--master-data选项会自动加上开启复制需要的"change master to"语句 ...
- 第3章 Python基础-文件操作&函数 文件操作 练习题
一.利用b模式,编写一个cp工具,要求如下: 1. 既可以拷贝文本又可以拷贝视频,图片等文件 2. 用户一旦参数错误,打印命令的正确使用方法,如usage: cp source_file target ...
- Oracle 11g安装,新建表空间和用户
windows版: 官网下载,两个压缩包,总共2G,解压到同一个文件夹下,setup.exe双击执行,首次安装的话,一直下一步就可以了,最后一步可能时间比较长,等着就好了,一般性能的机器大概要半小时左 ...
- ARM:移动GPU往PC GPU效能迈进
行动装置的热潮持续不退,各大手机制造商除了想尽办法推出外型酷炫的行动装置设备来吸引消费者的目光之外,更在行动应用处理器玩起多核心的「核」战争,无非是希望能够带给消费者更优异的效能新体验.然而,随着消费 ...
- windows下php的各个版本下载地址
windows下php的各个版本 https://windows.php.net/downloads/releases/archives/
- php分享十八七:mysql基础
mysql操作数据库代码: $link = @mysql_connect('localhost:3306', 'root', 'root') or die(mysql_error()); mysql_ ...
- XMPP 安装ejabberd 搭建服务器环境
网上各种找..各种安装失败.. 终于.... ejabberd 下载列表.... http://www.process-one.net/en/ejabberd/archive/ 建议下载old 版本 ...
- Atitit 图像处理 halcon类库的使用 范例边缘检测 attilax总结
Atitit 图像处理 halcon类库的使用 范例边缘检测 attilax总结 1.1. 安装halcon11 ..体积大概1g压缩模式1 1.2. Halcon的科技树1 1.3. 启动 &qu ...
- vivado2015.4 simulator 存储所有信号到 .wdb 文件 并打开波形文件查看波形
OS WIN7vivado 2015.4vivado自带的仿真器 vivado project 包含一个block design, block design 中包含AXIPCIE, MIG, INTE ...
- android笔记---百度地图api应用 (一)
package com.example.bdtest; import com.baidu.mapapi.MKEvent; import com.baidu.mapapi.MKPlanNode; imp ...