PCL—点云分割(基于形态学) 低层次点云处理
博客转载自:http://www.cnblogs.com/ironstark/p/5017428.html
1.航空测量与点云的形态学
航空测量是对地形地貌进行测量的一种高效手段。生成地形三维形貌一直是地球学,测量学的研究重点。但对于城市,森林,等独特地形来说,航空测量会受到影响。因为土地表面的树,地面上的房子都认为的改变了地貌,可以认为是地貌上的噪声点。设计一种有效的手段去除地面噪声对地形测量的影响显得非常重要。这种工作可以认为是一种特殊的点云分割,一般情况下点云分割的目标是去除地面,而这种方法需要在不使用地面平整假设的前提下获得地面。
形态学是图像处理中非常重要的概念,对二值图像而言,可由简单的膨胀运算和腐蚀运算组成一个完整的图像处理族。但是想要将这个算法移植到三维点云上是比较难的,首先一般的点云没有明显的映射值,也没有清晰的定义域,很难设计形态学处理的基理。但是LIDAR点云例外。由于LIDAR点云由飞机获得,飞机距离地面相对较远,且测量方向和地面垂直。这就形成了比较完整的xy->z映射(z方向的范围远远小于xy方向),z方向代表地面物体的高度,x,y方向为平行与地面且相互垂直的两个轴。有了明确的定义域以及单值映射关系就有了设计形态学算法的基本要素。实际上除了形态学算法之外,许多图像处理算法都可以用来分割LIDAR点云了,本质上这就是一幅大图像。
2.三维形态学算子
对于图像而言,形态学运算一般是针对二值图像而言的。当然也有针对灰度的形态学运算,其原理应该和针对点云的形态学运算类似(我猜的)。形态学算子的设计实际上非常简单,只要能设计出基础的膨胀和腐蚀算子就可以组合得到一系列的处理。
其中,d表示膨胀算子,e表示腐蚀算子。算子的原理有些像中值滤波,通过选取一个窗w中最高点或最低点来完成图像的膨胀和腐蚀,其效果如下图所示:
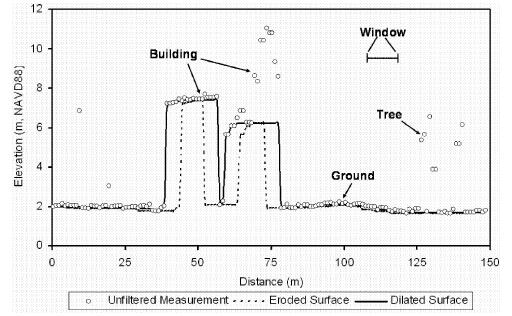
在航拍图的横截面上可以很清楚的看出膨胀与腐蚀的效果。对于房子和树可以用不同尺度窗(从小到大)先腐蚀至地面。但是这会导致一个巨大的问题。。。如果地面上有个土包(比如秦始皇陵),那么这个土包也会在一次次的腐蚀中被消耗。那岂不是秦始皇陵就发现不了?所以还有一个补偿算法用于解决这个问题,称为线性补偿算法。
建筑物和土包有一个巨大的区别,建筑物往往相对比较陡峭,而土包却是变化比较平缓的。这个可以作为一个判据,用于判断物体是否需要被腐蚀,也作为窗收敛的判据。
式中k称为斜率,代表下一个窗的大小是上一个窗的2^k倍
s是一个因子

dh是切深判据,每一次腐蚀大于切深判据才认为是有效的,小于切深判据则是土包。
上述公式是怎么发现的就需要问论文作者了,所有材料都被收录于文章:A Progressive Morphological Filter for Removing Nonground Measurements From Airborne LIDAR Data
3.PCL对本算法的实现
//生成形态滤波器 pcl::ProgressiveMorphologicalFilter<pcl::PointXYZ> pmf; pmf.setInputCloud (cloud); //设置窗的大小以及切深,斜率信息 pmf.setMaxWindowSize (); pmf.setSlope (1.0f); pmf.setInitialDistance (0.5f); pmf.setMaxDistance (3.0f); //提取地面 pmf.extract (ground->indices); // 从标号到点云 pcl::ExtractIndices<pcl::PointXYZ> extract; extract.setInputCloud (cloud); extract.setIndices (ground); extract.filter (*cloud_filtered);
算法效果如图:
PCL—点云分割(基于形态学) 低层次点云处理的更多相关文章
- PCL—关键点检测(rangeImage)低层次点云处理
博客转载自:http://www.cnblogs.com/ironstark/p/5046479.html 关键点又称为感兴趣的点,是低层次视觉通往高层次视觉的捷径,抑或是高层次感知对低层次处理手段的 ...
- PCL—关键点检测(Harris)低层次点云处理
博客转载自:http://www.cnblogs.com/ironstark/p/5064848.html 除去NARF这种和特征检测联系比较紧密的方法外,一般来说特征检测都会对曲率变化比较剧烈的点更 ...
- PCL—关键点检测(NARF)低层次点云处理
博客转载自:http://www.cnblogs.com/ironstark/p/5051533.html 关键点检测本质上来说,并不是一个独立的部分,它往往和特征描述联系在一起,再将特征描述和识别. ...
- PCL—点云分割(最小割算法) 低层次点云处理
1.点云分割的精度 在之前的两个章节里介绍了基于采样一致的点云分割和基于临近搜索的点云分割算法.基于采样一致的点云分割算法显然是意识流的,它只能割出大概的点云(可能是杯子的一部分,但杯把儿肯定没分割出 ...
- PCL—点云分割(基于凹凸性) 低层次点云处理
博客转载自:http://www.cnblogs.com/ironstark/p/5027269.html 1.图像分割的两条思路 场景分割时机器视觉中的重要任务,尤其对家庭机器人而言,优秀的场景分割 ...
- PCL—点云分割(邻近信息) 低层次点云处理
博客转载自:http://www.cnblogs.com/ironstark/p/5000147.html 分割给人最直观的影响大概就是邻居和我不一样.比如某条界线这边是中华文明,界线那边是西方文,最 ...
- PCL—点云分割(超体聚类) 低层次点云处理
博客转载自:http://www.cnblogs.com/ironstark/p/5013968.html 1.超体聚类——一种来自图像的分割方法 超体(supervoxel)是一种集合,集合的元素是 ...
- PCL—点云滤波(基于点云频率) 低层次点云处理
博客转载自:http://www.cnblogs.com/ironstark/p/5010771.html 1.点云的频率 今天在阅读分割有关的文献时,惊喜的发现,点云和图像一样,有可能也存在频率的概 ...
- PCL—点云分割(RanSaC)低层次点云处理
博客转载自:http://blog.csdn.net/app_12062011/article/details/78131318 点云分割 点云分割可谓点云处理的精髓,也是三维图像相对二维图像最大优势 ...
随机推荐
- //封装tabs函数
//封装tabs函数function tabs(tabTit,on,tabCon){ $(tabCon).each(function(){ $(this).children().eq(0).show( ...
- 单链表输出倒数第k个结点值(栈实现)
思路1:定义两个指针变量p和q,初始时均指向头节点的下一个节点(链表的第一个节点),p指针沿链表移动: 当p指针移动到第k个节点时,q指针开始与p指针同步移动, 当p指针移动到最后一个节点时,q指针所 ...
- BEC listen and translation exercise 12
More than 220 cities now have air quality monitoring systems and 42 others will have systems in plac ...
- python中join函数用法
str.join(list/tuple/dict/string) str = "-"; seq = ("a", "b", "c&q ...
- Windows之IOCP
IOCP全称I/O Completion Port,中文译为I/O完成端口.IOCP是一个异步I/O的Windows API,它可以高效地将I/O事件通知给应用程序,类似于Linux中的Epoll,关 ...
- Linux下anaconda的安装
http://peteryuan.net/use-anaconda/ http://www.jianshu.com/p/03d757283339
- laravel vendor目录的安装
- HDU4039(map应用)
The Social Network Time Limit: 3000/2000 MS (Java/Others) Memory Limit: 65768/65768 K (Java/Others)T ...
- bash的使用
转自:http://blog.csdn.net/y2888886/article/details/50535033 在上篇博文的基础上做如下修改 注意一些常见命令中间就要加 “ ” ,否则很多命令无法 ...
- webrtc doubango linphone
1.doubango官网:http://www.doubango.org/ 2.doubango是一个开源的VOIP基础平台, 并能用于嵌入式和桌面系统的开源框架,该框架使用ANSCI-C编写,具有很 ...