CH59X/CH58X/CH57X PWM使用
以CH582M为例:
CH582M有4+8组PWM这里的4路26位PWM(定时器提供),8路系统PWM(8位)


先看系统提供的PWM:
下列截图根据例程进行测试的
注:如需要使用PWM11则需要通过isp工具关闭外部引脚功能复位功能
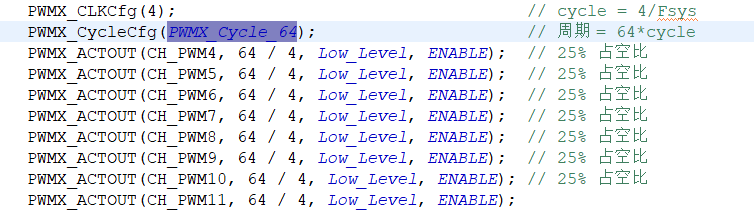
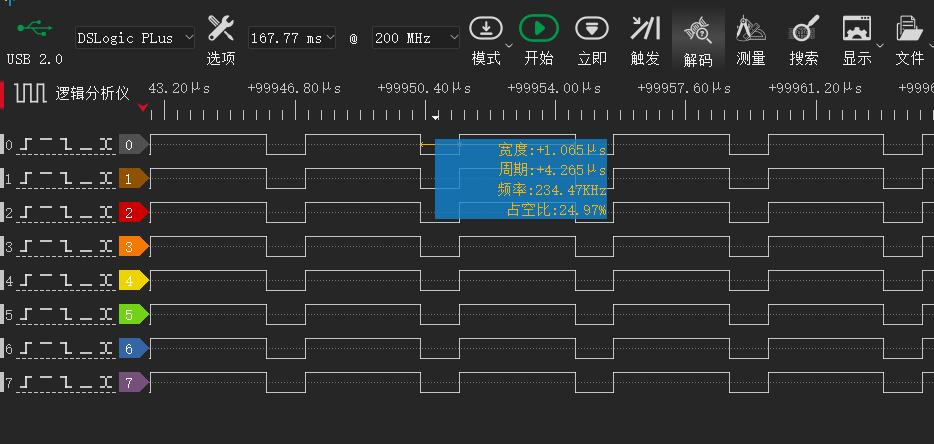
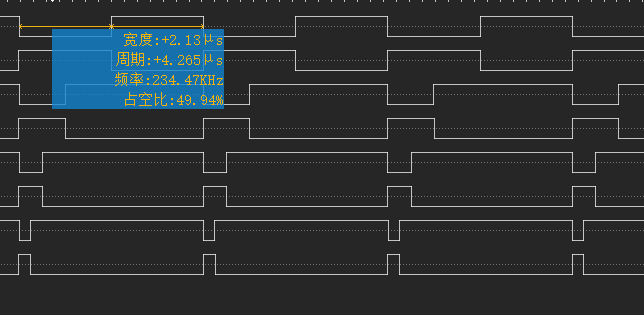
接下来修改不同占空比不同翻转极性:
占空比计算:64/x/64

接下来看定时器产生的PWM:
以通过DMA配置输出为例
例程上使用的循环模式先看循环模式
GPIOB_ModeCfg(GPIO_Pin_11, GPIO_ModeOut_PP_5mA);
GPIOPinRemap(ENABLE, RB_PIN_TMR2); PRINT("TMR2 DMA PWM\n");
TMR2_PWMCycleCfg(60 * 2000); // 周期 2000us 主频是60Mhz 每秒震荡60M次 震荡60次为1微秒
for(i=0; i<50; i++)
{
PwmBuf[i]=2400*i;
}
for(i=50; i<100; i++)
{
PwmBuf[i]=2400*(100-i);
} TMR2_PWMInit(Low_Level, PWM_Times_16);
TMR2_DMACfg(ENABLE, (uint16_t)(uint32_t)&PwmBuf[0], (uint16_t)(uint32_t)&PwmBuf[100], Mode_LOOP);
TMR2_PWMEnable();
TMR2_Enable();
/* 开启计数溢出中断,计满100个周期进入中断 */
TMR2_ClearITFlag(TMR1_2_IT_DMA_END);
TMR2_ITCfg(ENABLE, TMR1_2_IT_DMA_END);
PFIC_EnableIRQ(TMR2_IRQn); __INTERRUPT
__HIGH_CODE
void TMR2_IRQHandler(void)
{
if(TMR2_GetITFlag(TMR0_3_IT_CYC_END))
{
TMR2_ClearITFlag(TMR0_3_IT_CYC_END);
/* 计数器计满,硬件自动清零,重新开始计数 */
/* 用户可自行添加需要的处理 */
}
if(TMR2_GetITFlag(TMR1_2_IT_DMA_END))
{
TMR2_ClearITFlag(TMR1_2_IT_DMA_END);
PRINT("DMA end\n");
/* DMA 结束 */
/* 用户可自行添加需要的处理 */
}
}
接下看单次模式;单次模式除了需要将本处进行修改还需要对中断函数进行修改
TMR2_DMACfg(ENABLE, (uint16_t)(uint32_t)&PwmBuf[0], (uint16_t)(uint32_t)&PwmBuf[100], Mode_Single);
__INTERRUPT
__HIGH_CODE
void TMR2_IRQHandler(void)
{
if(TMR2_GetITFlag(TMR0_3_IT_CYC_END))
{
TMR2_ClearITFlag(TMR0_3_IT_CYC_END);
/* 计数器计满,硬件自动清零,重新开始计数 */
/* 用户可自行添加需要的处理 */
}
if(TMR2_GetITFlag(TMR1_2_IT_DMA_END))
{
TMR2_DMACfg(ENABLE, (uint16_t)(uint32_t)&TestBuf[0], (uint16_t)(uint32_t)&TestBuf[100], Mode_Single);
TMR2_ClearITFlag(TMR1_2_IT_DMA_END);
PRINT("DMA end\n");
PFIC_DisableIRQ(TMR2_IRQn);
TMR2_ITCfg(DISABLE,TMR1_2_IT_DMA_END);
/* DMA 结束 */
/* 用户可自行添加需要的处理 */
}
}
PWM如下:

个人学习分享;如有问题请指正
转载请保留出处;
CH59X/CH58X/CH57X PWM使用的更多相关文章
- CH58X/CH57X/V208 Observer(观察者)例程讨论讲解
使用的是沁恒的CH582M的Observer例程与官方的demo板. 本例程的功能是主机扫描到从机的MAC地址并打印出来. 先对宏定义进行理解讨论. 最大响应扫描数为8,在串口调试助手那里可以看到打印 ...
- CH58X/CH57X/V208的Broadcaster(广播者)例程讲解
在对ble进行应用的时候,每个用户的需求可能不尽相同.这里着重介绍从机Broadcaster例程,只广播不连接. 使用该例程时可以在手机使用APP上对Broadcaster进行调试. 安卓端在应用市场 ...
- BLE目录
CH58x/CH57x 蓝牙从机篇(Peripheral) CH573 CH582 CH579蓝牙从机(Peripheral)/主机(Central)例程讲解一(蓝牙主从机收发数据接口说明) CH57 ...
- STM32之PWM君
PWM..英语好的人估计又知道这三个大写字母代表哪三个英语单词了.小弟不才,就说中文意思好了:脉冲宽度调制,玩过飞思卡尔的人估计对PWM非常的不陌生吧.电机驱动需要PWM,控制舵机的转向需要PWM,总 ...
- [nRF51822] 12、基础实验代码解析大全 · 实验19 - PWM
一.PWM概述: PWM(Pulse Width Modulation):脉冲宽度调制技术,通过对一系列脉冲的宽度进行调制,来等效地获得所需要波形. PWM 的几个基本概念: 1) 占空比:占空比是指 ...
- Windows on Device 项目实践 1 - PWM调光灯制作
在前一篇文章<Wintel物联网平台-Windows IoT新手入门指南>中,我们讲解了Windows on Device硬件准备和软件开发环境的搭建,以及Hello Blinky项目的演 ...
- 用Arduino剖析PWM脉宽调制
PWM(Pulse Width Modulation)简介 PWM,也就是脉冲宽度调制,用于将一段信号编码为脉冲信号,也就是方波信号.多用于在数字电路中驱动负载随时间变化的电子元件,如LED,电机等. ...
- Arduino学习经验(一)之解决舵机库和pwm输出冲突
一.前言 最近在公司学习Arduino uno ,用它实现小车超声波避障功能.实现的功能很简单,就是在小车前方挂一个超声波模块,当碰到障碍物时,会通过舵机进行摆头,判断两边的距离,进行左右转弯.但是碰 ...
- stm8s103 PWM
stm8s103 PWM的设置不难,但是很多人不注意选项字节这个问题,PWM是IO口的第二功能,要用ST Visual Programmer 修改选项字节. 只需要修改AFR0的功能就可以了
- 驱动实现led,pwm和中断基础知识
2015.4.8星期三 晴天 今天老师讲的内容是内核编写led和pwm驱动,实现花样灯和放歌的功能.理解应用和驱动的对接,最后自己实现了在放歌的时候根据歌曲的节奏亮灭一个小灯,应为两个独立的驱动都已经 ...
随机推荐
- 「学习笔记」DP 学习笔记1
序列 DP 一般序列 DP 核心思想:将序列的前 \(i\) 个数的状态用一个更简单的形式表示出,并且体现出这些状态对后续的影响. 题目 ABC 267D 给定一个序列 \(a\),找到一个长度为 \ ...
- flutter系列之:做一个图像滤镜
目录 简介 我们的目标 带滤镜的图片 打造filter按钮 打造可滑动按钮 最后要解决的问题 简介 很多时候,我们需要一些特效功能,比如给图片做个滤镜什么的,如果是h5页面,那么我们可以很容易的通过c ...
- CF1770F Koxia and Sequence
一步都没想到,一定是状态不好吧,一定吧一定吧? 加训数数! 题意 给定 \(n, x, y\),定义好的序列 \(\{a_i\}_{i = 1}^n\) 满足 \(\sum\limits_{i = 1 ...
- XXE漏洞详解
XML外部实体注入--XXE漏洞详解 简单来说一下这个XXE漏洞,在这之前我也阅读了很多关于XXE漏洞的文章,发现有一小部分文章题目是 "XXE外部实体注入" 这样的字眼,我想这样 ...
- MRS-MRS相同功能代码管理应用笔记
MRS相同功能代码管理应用笔记 使用 MounRiver(以下简称 MRS )进行 RISC-V 单片机开发时,工程目录下往往存在多个文件夹与文件,我们只需要着重关注截图中红框所示的部分,它们自上而下 ...
- Java 网络编程 —— 安全网络通信
SSL 简介 SSL(Secure Socket Layer,安全套接字层)是一种保证网络上的两个节点进行安全通信的协议.IETF(Interet Engineering Task Force)国际组 ...
- 基于 NNCF 和 🤗 Optimum 面向 Intel CPU 对 Stable Diffusion 优化
基于隐空间的扩散模型 (Latent Diffusion Model),是解决文本到图片生成问题上的颠覆者.Stable Diffusion 是最著名的一例,广泛应用在商业和工业.Stable Dif ...
- 防缓存穿透利器-布隆滤器(BloomFilter)
布隆过滤器 1.布隆过滤器原理 1.1 什么是布隆过滤器 1.2 使用场景 1.3 原理 1.4 布隆过滤器的优缺点 2.实现方式 2.1 初始化skuId的布隆过滤器 2.1.1 RedisCons ...
- Linux 日志服务管理
日志管理 1 系统日志管理 1 rsyslog系统日志服务 日志记录的内容包括: 历史事件:时间,地点,人物,事件 Jul 18 14:30:53 # 时间 ubuntu2204 # 地点 (在哪个主 ...
- Spring的依赖注入方式(set及constructor)
Bean的依赖注入方式: set方法注入 P命名空间注入本质也是set方法注入,但比起上面的set方法进行注入更加方便,主要体现在配置文件中,如下: 首先,引入P命名空间: xmlns:p=" ...