OpenCV---轮廓发现
推文:OpenCV-Python教程(11、轮廓检测)
轮廓发现
是基于图像边缘提取的基础,寻找对象轮廓的方法,所以边缘提取的阈值选定会影响最终轮廓的发现
相关API
findContours 发现轮廓 drawContours绘制轮廓
操作步骤
.转换图像为二值化图像:threshold方法或者canny边缘提取获取的都是二值化图像
.通过二值化图像寻找轮廓:findContours
.描绘轮廓:drawContours
一:使用直接使用阈值方法threshold方法获取二值化图像来选择轮廓
def contours_demo(image):
dst = cv.GaussianBlur(image,(,),) #高斯模糊,消除噪声
gray = cv.cvtColor(dst,cv.COLOR_BGR2GRAY) #先变灰度图像
ret, binary = cv.threshold(gray,,,cv.THRESH_BINARY|cv.THRESH_OTSU) #获取二值图像
cv.imshow("binary image",binary) # cloneImage,contours,heriachy = cv.findContours(binary,cv.RETR_TREE,cv.CHAIN_APPROX_SIMPLE) #RETR_TREE包含检测内部
cloneImage,contours,heriachy = cv.findContours(binary,cv.RETR_EXTERNAL,cv.CHAIN_APPROX_SIMPLE) #RETR_EXTERNAL检测外部轮廓
for i, contour in enumerate(contours):
# cv.drawContours(image,contours,i,(,,),) #绘制轮廓
cv.drawContours(image,contours,i,(,,),-) #填充轮廓
print(i)
cv.imshow("detect contours",image) src = cv.imread("./lk.png") #读取图片
cv.namedWindow("input image",cv.WINDOW_AUTOSIZE) #创建GUI窗口,形式为自适应
cv.imshow("input image",src) #通过名字将图像和窗口联系 contours_demo(src) cv.waitKey() #等待用户操作,里面等待参数是毫秒,我们填写0,代表是永远,等待用户操作
cv.destroyAllWindows() #销毁所有窗口


二:使用canny边缘检测获取二值化图像
def contours_demo(image):
binary = edge_demo(image) cloneImage,contours,heriachy = cv.findContours(binary,cv.RETR_TREE,cv.CHAIN_APPROX_SIMPLE) #RETR_TREE包含检测内部
for i, contour in enumerate(contours):
# cv.drawContours(image,contours,i,(,,),)
cv.drawContours(image,contours,i,(,,),-)
print(i)
cv.imshow("detect contours",image) def edge_demo(image):
dst = cv.GaussianBlur(image,(,),)
gray = cv.cvtColor(dst,cv.COLOR_BGR2GRAY) #先变灰度图像 edge_output = cv.Canny(gray,,) cv.imshow("detect contours",edge_output)
return edge_output src = cv.imread("./lk.png") #读取图片
cv.namedWindow("input image",cv.WINDOW_AUTOSIZE) #创建GUI窗口,形式为自适应
cv.imshow("input image",src) #通过名字将图像和窗口联系 contours_demo(src) cv.waitKey() #等待用户操作,里面等待参数是毫秒,我们填写0,代表是永远,等待用户操作
cv.destroyAllWindows() #销毁所有窗口

相关知识补充
(一)findContours寻找轮廓
cv.findContours(binary,cv.RETR_TREE,cv.CHAIN_APPROX_SIMPLE)
def findContours(image, mode, method, contours=None, hierarchy=None, offset=None): # real signature unknown; restored from __doc__
1.image:输入图像,图像必须为8-bit单通道图像,图像中的非零像素将被视为1,0像素保留其像素值,故加载图像后会自动转换为二值图像。可以通过threshold和canny获取
2.mode:轮廓检索模式
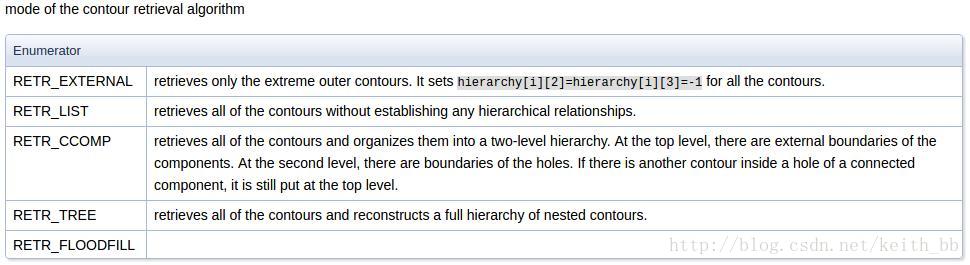
RETR_EXTERNAL:表示只检测最外层轮廓,对所有轮廓设置hierarchy[i][]=hierarchy[i][]=-
RETR_LIST:提取所有轮廓,并放置在list中,检测的轮廓不建立等级关系
RETR_CCOMP:提取所有轮廓,并将轮廓组织成双层结构(two-level hierarchy),顶层为连通域的外围边界,次层位内层边界
RETR_TREE:提取所有轮廓并重新建立网状轮廓结构
RETR_FLOODFILL:官网没有介绍,应该是洪水填充法
.method:轮廓近似方法
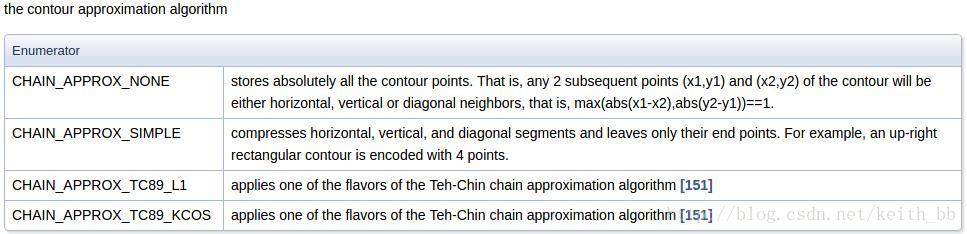
CHAIN_APPROX_NONE:获取每个轮廓的每个像素,相邻的两个点的像素位置差不超过1
CHAIN_APPROX_SIMPLE:压缩水平方向,垂直方向,对角线方向的元素,值保留该方向的重点坐标,如果一个矩形轮廓只需4个点来保存轮廓信息
CHAIN_APPROX_TC89_L1和CHAIN_APPROX_TC89_KCOS使用Teh-Chinl链逼近算法中的一种
返回值:
ret = cv.findContours(binary, cv.RETR_TREE, cv.CHAIN_APPROX_SIMPLE)
cloneImage,contours,heriachy = cv.findContours(binary,cv.RETR_TREE,cv.CHAIN_APPROX_SIMPLE) #RETR_TREE包含检测内部
返回一个元组,内部有三个元素
<class 'numpy.ndarray'>
<class 'list'>
<class 'numpy.ndarray'>
第一个返回值:cloneImage是我们传入的二值化图像
第二个返回值:contours是一个列表,是轮廓本身,含有轮廓上面的各个点的位置信息
第三个返回值:heriachy是每条轮廓对应的属性
(二)drawContours绘制轮廓
cv.drawContours(image,contours,i,(,,),)
cv.drawContours(image,contours,i,(,,),-)
def drawContours(image, contours, contourIdx, color, thickness=None, lineType=None, hierarchy=None, maxLevel=None, offset=None): # real signature unknown; restored from __doc__
.image:输入输出图像,Mat类型即可
.contours:使用findContours检测到的轮廓数据,每个轮廓以点向量的形式存储
.contourIdx:绘制轮廓的只是变量,如果为负值则绘制所有输入轮廓
.color:轮廓颜色
.thickness:绘制轮廓所用线条粗细度,如果值为负值,则在轮廓内部绘制
OpenCV---轮廓发现的更多相关文章
- opencv——轮廓发现与轮廓(二值图像)分析
引言 二值图像分析最常见的一个主要方式就是轮廓发现与轮廓分析,其中轮廓发现的目的是为轮廓分析做准备,经过轮廓分析我们可以得到轮廓各种有用的属性信息. 这里顺带提下边缘检测,和轮廓提取的区别: 边缘检测 ...
- opencv::轮廓发现(find contour in your image)
轮廓发现(find contour) 轮廓发现是基于图像边缘提取的基础寻找对象轮廓的方法. 所以边缘提取的阈值选定会影响最终轮廓发现结果 //发现轮廓 cv::findContours( InputO ...
- Python+OpenCV图像处理(十六)—— 轮廓发现
简介:轮廓发现是基于图像边缘提取的基础寻找对象轮廓的方法,所以边缘提取的阈值选定会影响最终轮廓发现结果. 代码如下: import cv2 as cv import numpy as np def c ...
- 【python+opencv】轮廓发现
python+opencv---轮廓发现 轮廓发现---是基于图像边缘提取的基础寻找对象轮廓的方法, 所有边缘提取的阈值选定会影响最终轮廓发现的结果. 介绍两种API使用: -cv.findConto ...
- opencv轮廓外接矩形
1.寻找轮廓 api void cv::findContours( InputOutputArray image, OutputArrayOfArrays contours, OutputArray ...
- OpenCV 轮廓基本特征
http://blog.csdn.net/tiemaxiaosu/article/details/51360499 OpenCV 轮廓基本特征 2016-05-10 10:26 556人阅读 评论( ...
- OpenCV轮廓vectorvector
OpenCV轮廓vectorvector,vector,vector,vector https://blog.csdn.net/Ahuuua/article/details/80593388 轮廓 ...
- python实现轮廓发现
目录: (一)轮廓发现的介绍 (二)代码实现 (1)使用直接使用阈值方法threshold方法获取二值化图像来选择轮廓 (2)使用canny边缘检测获取二值化图像 (一)轮廓发现的介绍与API的介绍 ...
- 15、OpenCV Python 轮廓发现
__author__ = "WSX" import cv2 as cv import numpy as np # 基于拓扑结构来发现和绘制(边缘提取) # cv.findConto ...
- opencv:图像轮廓发现
#include <opencv2/opencv.hpp> #include <iostream> using namespace cv; using namespace st ...
随机推荐
- 《C》VS控制台应用
源(c)文件:主要是源码,包括程序入口,函数的实现 头(h)文件:主要是定义的函数声明 资源(rc)文件:程序中用到的辅助资源,比如位图,图标资源 解决VS2015安装后stdio.h ucrtd.l ...
- CocoaPods 创建私有仓库
这里有个坑首先需要注意,创建私有cocoapods仓库需要两个git仓库,即代码仓库,Specs文件仓库. 一.创建私有库 1.创建自己源码仓库,假设是A.git; 2.对A仓库: git add . ...
- XML XPath语法总结
刚刚遇到一个多重查询xmlDoc.SelectSingleNode("Root/Element[@Name='大气象'][@Age='30']")根据innerText查询xmlD ...
- Java throw try catch
public class Runtest { public static void main(String[] args) { // TODO Auto-generated method stub T ...
- Scrum 项目准备3.0
SCRUM 流程的步骤2: Spring 计划 1. 确保product backlog井然有序.(参考示例图1) 2. Sprint周期,一个冲刺周期,长度定为两周,本学期还有三个冲刺周期. Spr ...
- windows下面安装python3遇到的没有添加到环境变量的问题
windows下面安装python3出现的问题 在官网上面下载最新版的安装包进行安装,并勾选Add Python 3.5 to PATH 安装的过程中可能会出现没有添加到PATH路径的情况 默认的安装 ...
- 【转】关于cgi、FastCGI、php-fpm、php-cgi
转自 知乎 的 一个回答 首先,CGI是干嘛的?CGI是为了保证web server传递过来的数据是标准格式的,方便CGI程序的编写者. web server(比如说nginx)只是内容的分发者.比如 ...
- Linux下objdump查看C程序编译后的汇编代码
http://m.blog.csdn.net/article/details?id=47747047 Uboot中start.S源码的指令级的详尽解析 http://www.crifan.com/fi ...
- Thread的run()与start()的区别
java的线程是通过java.lang.Thread类来实现的.VM启动时会有一个由主方法所定义的线程.可以通过创建Thread的实例来创建新的线程.每个线程都是通过某个特定Thread对象所对应的方 ...
- [C/C++] 指针数组和数组指针
转自:http://www.cnblogs.com/Romi/archive/2012/01/10/2317898.html 这两个名字不同当然所代表的意思也就不同.我刚开始看到这就吓到了,主要是中文 ...