opencv轮廓外接矩形
1.寻找轮廓
api
void cv::findContours( InputOutputArray image, OutputArrayOfArrays contours, OutputArray hierarchy, int mode, int method, Point offset = Point()
各个参数详解如下:
- Image表示输入图像,必须是二值图像,二值图像可以threshold输出、Canny输出、inRange输出、自适应阈值输出等。
- Contours获取的轮廓,每个轮廓是一系列的点集合
- Hierarchy轮廓的层次信息,每个轮廓有四个相关信息,分别是同层下一个、前一个、第一个子节点、父节点
- mode 表示轮廓寻找时候的拓扑结构返回 -RETR_EXTERNAL表示只返回最外层轮廓 -RETR_TREE表示返回轮廓树结构
CV_RETR_EXTERNAL:只检测外轮廓。忽略轮廓内部的洞
CV_RETR_LIST:检测所有轮廓,但不建立继承(包含)关系
CV_RETR_TREE:检测所有轮廓,并且建立所有的继承(包含)关系。也就是说用CV_RETR_EXTERNAL和CV_RETR_LIST方法的时候hierarchy这个变量是没用的,因为前者没有包含关系,找到的都是外轮廓,后者仅仅是找到所哟的轮廓但并不把包含关系区分。用TREE这种检测方法的时候我们的hierarchy这个参数才是有意义的
CV_RETR_CCOMP:检测所有轮廓,但是仅仅建立两层包含关系。外轮廓放到顶层,外轮廓包含的第一层内轮廓放到底层,如果内轮廓还包含轮廓,那就把这些内轮廓放到顶层去。
- Method表示轮廓点集合取得是基于什么算法,常见的是基于CHAIN_APPROX_SIMPLE链式编码方法
注意,如果图像底色是白色,则检测最外层的轮廓为图像边框
2.绘制轮廓外接矩形
绘制外接矩形包括两种:
- 绘制最大外接矩形
(Rect cv::boundingRect( InputArray points ))
其中,输入参数points为一系列点的集合(findContours中contours中的一个元素),对轮廓来说就是该轮廓的点集 返回结果是一个矩形,x, y, w, h
- 绘制最小外接矩形
RotatedRect cv::minAreaRect( InputArray points )
其中,输入参数points为一系列点的集合(findContours中contours中的一个元素) ,对轮廓来说就是该轮廓的点集 返回结果是一个旋转矩形,包含下面的信息: - 矩形中心位置 - 矩形的宽高 - 旋转角度。
3.代码
EdgeDetection.h
#pragma once
#include<opencv2/opencv.hpp>
#include<iostream> using namespace std;
using namespace cv; class EdgeDetection
{
cv::Mat m_img;
cv::Mat m_canny;
public:
EdgeDetection(cv::Mat iamge);
bool cannyProcess(unsigned int downThreshold,unsigned int upThreshold);
bool getContours(); ~EdgeDetection();
};
EdgeDetection.cpp
#include "EdgeDetection.h" EdgeDetection::EdgeDetection(cv::Mat image)
{
m_img = image;
} bool EdgeDetection::cannyProcess(unsigned int downThreshold, unsigned int upThreshold)
{
bool ret=true; if (m_img.empty())
{
ret = false;
} cv::Canny(m_img, m_canny, downThreshold, upThreshold);
cv::imshow("Canny", m_canny); return ret;
} bool EdgeDetection::getContours()
{
bool ret = true;
if (m_canny.empty())
{
ret = false;
} cv::Mat k = cv::getStructuringElement(cv::MORPH_RECT, cv::Size(, ), cv::Point(-, -));
cv::dilate(m_canny, m_canny, k);
imshow("dilate", m_canny); // 轮廓发现与绘制
vector<vector<cv::Point> > contours;
vector<Vec4i> hierarchy;
findContours(m_canny, contours, cv::RETR_EXTERNAL, CHAIN_APPROX_SIMPLE, Point()); for (size_t i = ; i < contours.size();++i)
{
// 最大外接轮廓
cv::Rect rect = cv::boundingRect(contours[i]);
cv::rectangle(m_img,rect,cv::Scalar(,,),,LINE_8); // 最小外接轮廓
RotatedRect rrt = minAreaRect(contours[i]);
Point2f pts[];
rrt.points(pts);
// 绘制旋转矩形与中心位置
for (int i = ; i < ; i++) {
line(m_img, pts[i % ], pts[(i + ) % ], Scalar(, , ), , , );
}
Point2f cpt = rrt.center;
circle(m_img, cpt, , Scalar(, , ), , , );
} imshow("contours", m_img);
return ret;
} EdgeDetection::~EdgeDetection()
{
}
main.cpp
#include"EdgeDetection.h"
using namespace std;
using namespace cv; int main(int argc, char* argv[])
{
Mat src = imread("rect.jpg");
if (src.empty())
{
cout << "image is empty" << endl;
return -;
} imshow("input", src); EdgeDetection ed(src); ed.cannyProcess(,);
ed.getContours(); waitKey();
return ;
}
原图

canny
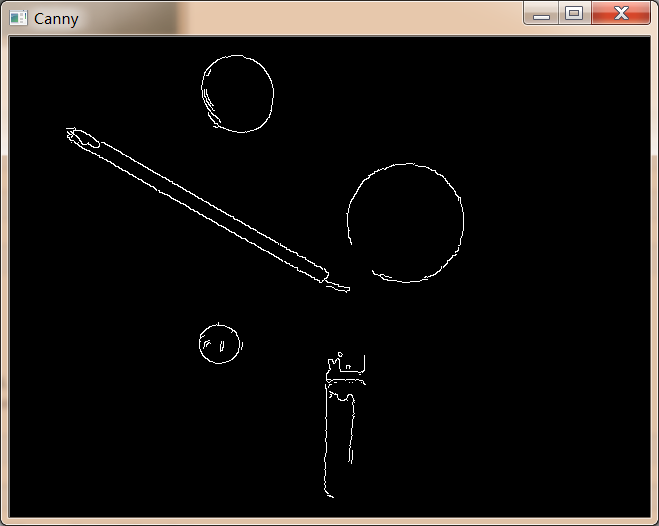
目标图
opencv轮廓外接矩形的更多相关文章
- Opencv 最小外接矩形合并拼接
前一篇画出了最小外接矩形,但是有时候画出来的矩形由于中间像素干扰或者是其他原因矩形框并不是真正想要的 如图1是一个信号的雨图,被矩形框分割成了多个小框: 需要合并矩形框达到的效果: 主要思想: 扫描两 ...
- opencv画出轮廓外接矩形
Mat cannyImage; /// Detect edges using canny Canny(src, cannyImage, , , ); vector<vector<Point ...
- OpenCV 求外接矩形以及旋转角度
程序没有写完整,大概功能就是实现了,希望大家分享学习,把他改对 // FindRotation-angle.cpp : 定义控制台应用程序的入口点. // // findContours.cpp : ...
- opencv学习之路(26)、轮廓查找与绘制(五)——最小外接矩形
一.简介 二.轮廓最小外接矩形的绘制 #include "opencv2/opencv.hpp" using namespace cv; void main() { //轮廓最小外 ...
- opencv学习之路(25)、轮廓查找与绘制(四)——正外接矩形
一.简介 二.外接矩形的查找绘制 #include "opencv2/opencv.hpp" using namespace cv; void main() { //外接矩形的查找 ...
- OpenCV代码:画出轮廓的外接矩形,和中心点
#include <opencv2/highgui/highgui.hpp> #include <opencv2/imgproc/imgproc.hpp> #include & ...
- Opencv绘制最小外接矩形、最小外接圆
Opencv中求点集的最小外结矩使用方法minAreaRect,求点集的最小外接圆使用方法minEnclosingCircle. minAreaRect方法原型: RotatedRect minAre ...
- Opencv,腐蚀,膨胀,轮廓检测,轮廓外接多边形
//形态学腐蚀 cvErode(pDstImage,pDstImage,,); //形态学膨胀 cvDilate(pDstImage,pDstImage,,); //中值滤波 cvSmooth(pDs ...
- Opencv 改进的外接矩形合并拼接方法
上一篇中的方法存在的问题是矩形框不够精确,而且效果不能达到要求 这里使用凸包检测的方法,并将原来膨胀系数由20缩小到5,达到了更好的效果 效果图: 效果图: 代码: #include <open ...
随机推荐
- 066_调整虚拟机内存参数的 shell 脚本
#!/bin/bash#脚本通过调用 virsh 命令实现对虚拟机的管理,如果没有该命令,需要安装 libvirt-client 软件包 cat << EOF1.调整虚拟机最大内存数值2. ...
- TensorFlow(六):tensorboard网络结构
# MNIST数据集 手写数字 import tensorflow as tf from tensorflow.examples.tutorials.mnist import input_data # ...
- Zotero使用教程(1)-安装及配置
小书匠kindle 作为一名科研人员,经常要阅读大量文献(当然我收集>>阅读,哎!),收集来的文献一般我们使用文件夹管理,通常使用文件夹命名和层级分布解决论文的分类问题. 但是,实 ...
- 【概率论】5-1:分布介绍(Special Distribution Introduction)
title: [概率论]5-1:分布介绍(Special Distribution Introduction) categories: - Mathematic - Probability keywo ...
- [HNOI2011]括号修复 / [JSOI2011]括号序列
传送门 Solution 一道题花费了两天的时间-- 在大佬@PinkRabbit的帮助下,终于AC了,感动-- 首先,我们考虑一个括号序列被修改成合法序列需要的次数: 我们需要修改的其实是形如... ...
- 由Java正则表达式的灾难性回溯引发的高CPU异常:java.util.regex.Pattern$Loop.match
问题与分析 某天领导report了一个问题:线上的CPU自从上一个版本迭代后就一直处于居高不下的状况,领导看着这段时间的曲线图判断是有两条线程在不停的死循环. 接到任务后去查看了AWS的CloudWa ...
- dsu on tree学习笔记
前言 一次模拟赛的\(T3\):传送门 只会\(O(n^2)\)的我就\(gg\)了,并且对于题解提供的\(\text{dsu on tree}\)的做法一脸懵逼. 看网上的其他大佬写的笔记,我自己画 ...
- Docker网络原则入门:EXPOSE,-p,-P,-link
如果你已经构建了一些多容器的应用程序,那么肯定需要定义一些网络规则来设置容器间的通信.有多种方式可以实现:可以通过--expose参数在运行时暴露端口,或者在Dockerfile里使用EXPOSE指令 ...
- T-MAX-凡事预则立
T-MAX-凡事预则立 这个作业属于哪个课程 2019秋福大软件工程实践Z班 这个作业要求在哪里 团队作业第五次-项目冲刺 团队名称 T-MAX 这个作业的目标 1.冲刺的时间计划安排2.答辩问题的回 ...
- react组件中返回并列元素的方法
我们在写react组件的时候,经常会遇到这种问题,在render中return元素只能有一个顶级元素,比如div,假如写成这样就会报错: render(){ return( <div>12 ...