LR Optimization-Based Estimator Design for Vision-Aided Inertial Navigation
Abstract
我们设计了一个 hybrid 估计器, 组合了两种算法, sliding-window EKF 和 EKF-SLAM.
我们的结果表示, hybrid算法比单一的好.
1. Introduction
EKF-SLAM和sliding-window EKF对相同的测量信息以不同的处理.
我们展示说, 最优的处理方式是, 基于特征跟踪长度 的分布来处理每个特征.
这个分布不是事先知道的(它基于环境, 相机运动), 所以我们从图像序列中学习. 使用了这个信息, 最优的策略来处理特征测量可以通过解决一个 单变量优化问题 来解决.
2. Related Work
a) Exact Reformulations of the SLAM equation
..
b) Approximations of the SLAM equations
[5-7] 用了SLAM等式的近似来减少计算量, 我们的方法没有写信息丢失, 没有近似, 比起EKF的线性化的不准确.
c) Feature Selection methods
..
3. Estimators for VIO
MSCKF和EKF-SLAM都用了一样的信息, 只是用不同的方法来组织算力和线性化.
如果测量模型是线性的, 两个方法会有一样的结果,跟IMU位姿的MAP是一样的.
在算力上, 就很不一样了. EKF-SLAM的算力是特征数量的立方(因为在状态向量里, 所有特征是可观的), 而MSCKF是跟特征数量线性的, 而跟特征跟踪的长度立方.
所以,
- 如果很多特征被跟踪, 即使是在很小的帧中, MSCKF会更好.
- 如果有很多点被长期跟踪, EKF-SLAM会计算力更低
所以EKF-SLAM和MSCKF是互补的.
4. The Hybrid MSCKF/SLAM Algorithm
A. The MSCKF algorithm for VIO
特征向量:
\mathbf{x}_{I_{k}}^{T} & \mathbf{x}_{C_{1}}^{T} & \mathbf{x}_{C_{2}}^{T} & \cdots & \mathbf{x}_{C_{m}}^{T}
\end{array}\right]^{T}
\]
IMU的状态是:
\overline{\mathbf{q}}^{T} & \mathbf{p}^{T} & \mathbf{v}^{T} & \mathbf{b}_{g}^{T} & \mathbf{b}_{a}^{T}
\end{array}\right]^{T}
\]
MSCKF用IMU测量来传播当前的IMU状态和协方差矩阵, \(P_{k+1|k}\).
我们假设第 \(i-th\)个特征, 它在 \(l\) 个图像被观测到, 然后刚跟踪失效. 这时候, 我们用所有的特征测量来做EKF更新.
观测的非线性等式是: \(z_{ij} = h(x_{C_j}, f_i) + n_{ij}\) , for \({h = 1, ..., l}\), \(f_i\) 是特征的位置(逆深度表示); $n_{ij} $ 是噪声向量, 零均值高斯, cov是\(\sigma^2 \mathbf{I}_2\).
使用所有的观测, 我们计算特征观测 \(\hat{f}_i\) , 然后计算残差 \(\tilde{z}_{ij} = z_{ij}- h(\hat{x}_{C_j}, \hat{f}_i), j= 1 ... l\). 通过线性化, 这些残差可以被写为:
\]
因为特征没有被包括在MSCKF的状态向量里, 我们把它边缘化掉.
首先, 我们形成这个 \(l\) 个残差(一个地图点的所有观测):
\]
这里 \(\tilde {z}_i\) 和 \(n_i\) 是元素 \(\tilde{z}_{ij}\) 和 \(n_{ij}\) 组成.
我们定义残差向量 \(\tilde{z}^o_i = V^T \tilde{z}_i\), 这里 \(V\) 是一个列形成 \(H_{fi}\) 左零空间 (left nullspace) 的矩阵. 所以, 我们有:
\]
然后, 我们可以用马氏gating test, 对于残差 \(\tilde{z}^o_i\):
\]
通过把所有的残差堆叠在一起, 我们有:
\]
如果在某个时刻有很多特征要处理, 可以省略更多的计算资源. 在[10]中, 我们可以计算 \(H^o\) 的QR分解, 写作 \(H^o=QH^r\), 然后用 \(\tilde{z}^r\) 来更新:
\]
这里 \(n^r\) 是一个 \(r\times1\) 的噪声向量, 协方差矩阵 \(\sigma^2 \mathbf{I}_r\).
一旦 \(\tilde{z}^r\) 和矩阵 \(H^R\) 被计算了, 我们计算state correction 和 update covariance矩阵通过标准的EKF公式:
\Delta \mathbf{x} &=\mathbf{K} \tilde{\mathbf{z}}^{r} \\
\mathbf{P}_{k+1 \mid k+1} &=\mathbf{P}_{k+1 \mid k}-\mathbf{K} \mathbf{S} \mathbf{K}^{T} \\
\mathbf{S} &=\mathbf{H}^{r} \mathbf{P}_{k+1 \mid k}\left(\mathbf{H}^{r}\right)^{T}+\sigma^{2} \mathbf{I}_{r} \\
\mathbf{K} &=\mathbf{P}_{k+1 \mid k}\left(\mathbf{H}^{r}\right)^{T} \mathbf{S}^{-1}
\end{aligned}
\]
B. Computational complexity of the MSCKF
MSCKF计算特征观察的方式是最优的, 因为除了EKF的线性化[22]之外, 没有用任何近似.
这个在滑窗的状态 \(m\) , 包含最少最长的特征跟踪的状态.
如果不是的话, 那么大于 \(m\) 过去的观测就没法被处理了. 所以为了利用所有可用的特征, MSCKF必须保持一个足够长的滑窗的状态.
MSCKF的计算量以如下决定:
- Eq 5计算的残差和雅克比矩阵. 如果有 \(n\) 个特征要处理, 特征跟踪的长度是 \(l_i\), 那就需要 \(\mathcal{O}(\Sigma_{i=1}^n \mathcal{l}^3_i)\) 个操作.
- 马氏测试, 需要 \(\mathcal{O}(\Sigma_{i=1}^nl^3)\) 个操作.
- Eq 8中的计算, 大约是 \(\mathcal{O}(\Sigma_{i=1}^nl^3)\)个操作
- 卡尔曼增益和协方差更新的计算, 需要 \(\mathcal{O}\left(r^{3} / 6+r(15+6 m)^{2}\right)\) . 这里 \(15+6m\) 是状态协方差的大小, \(r\) 是 \(H^r\) 个行数.
\]
这里 l _1,2,3 是三个最长的特征跟踪.
C. The hybrid MSCKF/SLAM algorithm
我们的状态向量是, 有IMU状态, 滑窗的m个相机, 和\(s_k\) 个特征.
\mathbf{x}_{I_{k}}^{T} & \mathbf{x}_{C_{1}}^{T} & \cdots & \mathbf{x}_{C_{m}}^{T} & \mathbf{f}_{1}^{T} & \cdots & \mathbf{f}_{s_{k}}^{T}
\end{array}\right]^{T}
\]
最优的(考虑计算需求)策略来用特征是简单的:
- 如果特征的track数少于 \(m\), (i.e. \(l_i < m\)), 那么用MSCKF来处理.
- 如果大于\(m\) 个track, 就初始化到state vector.
\tilde{\mathbf{z}}_{k}^{r} \\
\tilde{\mathbf{z}}_{1 m} \\
\vdots \\
\tilde{\mathbf{z}}_{s_{k} m}
\end{array}\right] \simeq\left[\begin{array}{c}
\mathbf{H}^{r} \\
\mathbf{H}_{1 m} \\
\vdots \\
\mathbf{H}_{s_{k} m}
\end{array}\right] \tilde{\mathbf{x}}_{k}+\mathbf{n}_{k}=\mathbf{H}_{k} \tilde{\mathbf{x}}_{k}+\mathbf{n}_{k}
\]
在上式中, \(\tilde{z}_{jm}\) 是 \(s_k\) SLAM特征的残差观测, \(H_{jm}\) 是相关的雅克比. 每个残差是一个 \(2\times1\) 的向量, \(H_{jm}\) 是一个 \(2\times(15+6m+3s_k)\) 的矩阵.
为了初始化新的特征, \(m\) 个观测会用来三角化 然后计算它的初始协方差 和 跟其他滤波状态的互相关.
我们用逆深度, 因为它很棒的线性化特性. 最新的相机clone, \(x_{C_m}\) 是用作"anchor" state.

5. 优化Hybrid EKF的表现
\(m\) 的选择有一个深渊的影响在算法的视觉需要上.
A. Operation count for each update
每个迭代的浮点运算的数量:
f_{k}=& \alpha_{1} \sum_{i=1}^{n} \ell_{i}^{3}+\alpha_{2}\left(r+2 s_{k}\right)^{3} \\
&+\alpha_{3}\left(r+2 s_{k}\right)\left(15+6 m+3 s_{k}\right)^{2}+l . o . t
\end{aligned}\tag{16}
\]
\(\alpha_i\) 是已知常量, \(n\) 是MSCKF的特征数, \(r\) 是Eq13, \(l.o.t.\) 表示lower order terms.
上式的三个项对应MSCKF残差的计算, 矩阵 \(\mathbf{S}\) 的Cholesky factorization, 和协方差的更新等式.
\(r\) 表示约束的个数, it is bounded above by \(6m-7\): 滑窗中的位置量是 \(6m\), 特征估计不能提供任何全局pose和scale的信息, 也就是7个自由度; 如果有很多特征, 我们有$r \approx 6m-7 $:
f_{k} \approx & \alpha_{1} \sum_{i=1}^{n} \ell_{i}^{3}+\alpha_{2}\left(6 m+2 s_{k}-7\right)^{3} \\
&+\alpha_{3}\left(6 m+2 s_{k}-7\right)\left(15+6 m+3 s_{k}\right)^{2}
\end{aligned}
\]
B. Minimizing the average operation count
我们现在来决定 \(m\) 的最优值, 来最小化 hybrid EKF的时间.
Eq 16提供了一次滤波更新计算的操作数. 第一眼看的时候, 我们可能会觉得是根据 \(m\) 来最小化公式. 但是实际是一个病态的问题. 举例, 如果\(m=20\) , 这时候有10个特征有20个track; 这时候我们可以选择提升window size或者是加到state vector. 但是最优解是基于未来的行为的, 如果有>>20个track, 自然是加到状态里好. 如果只有21个track, 自然increase \(m\) 是更好的做法.
我们可以用统计数据. 在滤波操作的时候, 我们收集数据来学习probability mass function(pmf) 在特征跟踪长度上 \(p(l_i)\). 用pmfs, 我们可以计算平均下来EKF更新的操作数 \(\bar{f}(m)\).
我们发现这个cost curve是 quasiconvix(准凸面).

所以, 为了减少优化需要的时间, 我们从一个足够好的初始猜测(e.g. the last computed threshold)通过局部搜索来做优化. 因为特征track的数据特征会会随着时间改变, 我们在15秒的区间做pmf的学习.
注意在现代电脑, flop计算来model计算量的cost不一定是永远work的, 因为表现还会被一些因素影响, 比如: vectorization, cache access patterns, data locality, etc.
6. Experimental Results
我们基于数据集[26]来做测试, 有29.6km长的轨迹.
**我们发现纯MSCKF得到最高的精度. 我们把这个归因于两个原因: 1. MSCKF特征都显式的边缘化了, 也没有Gaussianity假设给pdf在特征位置误差上(在SLAM里是这么做的). 2. 特征的所有测量都在MSCKF里联合用了, 这样外点会被更容易的检测, 也可以计算更好的线性点. ** ???
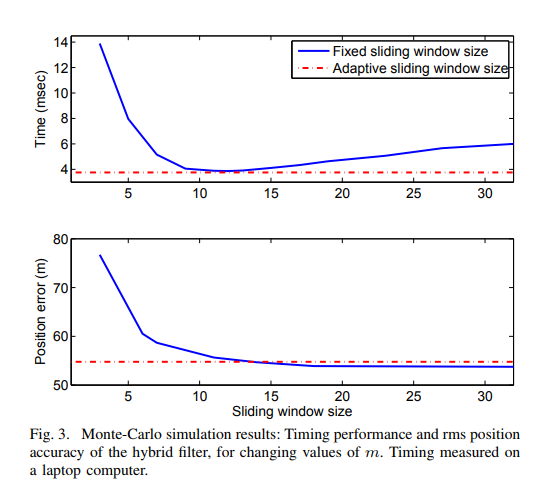
通过融合MSCKF和EKF-SLAM, 可能丢失了一些精度, 因为在状态向量里的特征被假设是Gaussian的. 但是, 我们可以看到, 如果window的size大于一个值(比如9), 精度的变化就可以忽略不计了.
这个insight是, 如果有足够数量的观测来初始化特征, 那么特征的errors'pdf就变得"足够高斯", 这样hybrid filter的精度就跟MSCKF很接近了, 在我们的优化中, 我们不允许 \(m\) 的值比一个阈值(7)小.
Fig. 3的时间损耗是在Core i7(2.13 GHz)上算的. 如果在这个平台上, 是很容易实时的, hybrid filter需要4msec之内(在最优的值 \(m\) 的时候).
B. Real-world data
每帧平均track 540个特征点, 平均track长度是5.06帧.
在移动处理器上跑的时候, MSCKF平均更新时间是139ms, EKF是774ms, hybrid是77ms.
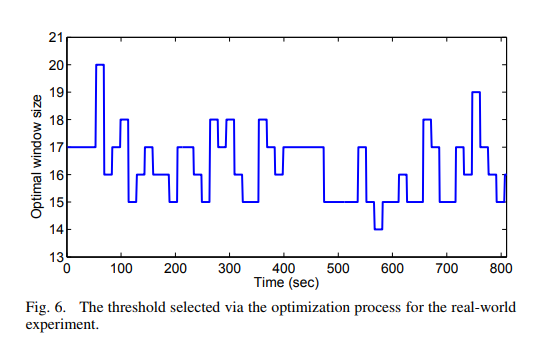
我们每15秒计算一次, 这个过程要0.31ms.
7. Discussion and Concluding Remarks
没啥
LR Optimization-Based Estimator Design for Vision-Aided Inertial Navigation的更多相关文章
- 泡泡一分钟:Tightly-Coupled Aided Inertial Navigation with Point and Plane Features
Tightly-Coupled Aided Inertial Navigation with Point and Plane Features 具有点和平面特征的紧密耦合辅助惯性导航 Yulin Ya ...
- 泡泡一分钟:Aided Inertial Navigation: Unified Feature Representations and Observability Analysis
http://udel.edu/~yuyang/downloads/tr_observabilityII.pdf Aided Inertial Navigation: Unified Feature R ...
- Codeforces Round #625 (Div. 2, based on Technocup 2020 Final Round) D. Navigation System(有向图,BFS,最短路)
题意: n 点 m 边有向图,给出行走路径,求行走途中到路径终点最短路变化次数的最小值和最大值 . 思路 : 逆向广搜,正向模拟. #include <bits/stdc++.h> usi ...
- Survey of single-target visual tracking methods based on online learning 翻译
基于在线学习的单目标跟踪算法调研 摘要 视觉跟踪在计算机视觉和机器人学领域是一个流行和有挑战的话题.由于多种场景下出现的目标外貌和复杂环境变量的改变,先进的跟踪框架就有必要采用在线学习的原理.本论文简 ...
- Architecture Design Process
Architecture Design Process The architecture design process focuses on the decomposition of a system ...
- Streamline Your App with Design Patterns 用设计模式精简你的应用程序
Back to Design Patterns Streamline Your App with Design Patterns 用设计模式精简你的应用程序 In Objective-C progra ...
- {ICIP2014}{收录论文列表}
This article come from HEREARS-L1: Learning Tuesday 10:30–12:30; Oral Session; Room: Leonard de Vinc ...
- Awesome C/C++
Awesome C/C++ A curated list of awesome C/C++ frameworks, libraries, resources, and shiny things. In ...
- Machine and Deep Learning with Python
Machine and Deep Learning with Python Education Tutorials and courses Supervised learning superstiti ...
随机推荐
- TonWeb6.1Linux安装文档
东方通部署文档 东方通安装部署文档 准备文件:开始安装:警告:在安装之前先安装JDK,JDK要求JDK5以上Linux安装:运行安装包sh Install_TW6.1.5.15_Standard_ ...
- FFmpeg开发笔记(四):ffmpeg解码的基本流程详解
若该文为原创文章,未经允许不得转载原博主博客地址:https://blog.csdn.net/qq21497936原博主博客导航:https://blog.csdn.net/qq21497936/ar ...
- C/C++ 实现PE文件特征码识别
PE文件就是我们常说的EXE可执行文件,针对文件特征的识别可以清晰的知道该程序是使用何种编程语言实现的,前提是要有特征库,PE特征识别有多种形式,第一种是静态识别,此方法就是只针对磁盘中文件的特征码字 ...
- 学习 | less入门
最近在写css的时候,发现自己写的css特别长,觉得自己写的特别low,所以为了加快自己的开发效率,又重新温习了less,下面就是我学习less的过程. less是不能被浏览器识别的,要转换成css, ...
- python中的运动控制函数
运动控制函数:控制海龟走直线&走曲线 海龟向前行进,海龟走直线,参数d表示行进距离,也可以为负数,单位是像素 根据半径r绘制extent角度的弧形 r : 默认圆心在海龟左侧r 距离的位置 e ...
- 解析nohup java -jar xxx &
一直就知道 java -jar xx ctrl+c就退出了 来自这个文 https://blog.csdn.net/wngpenghao/article/details/83022185 java - ...
- 解决vue侧边栏一级菜单问题
最近我在学习vue,然后遇到一个问题,就是跟着视频里面的代码敲,出现了一些不好解决的问题 这是两个一级目录,我遇到的问题就是点击第一个一级目录,另外一个一级目录也会展开, 前端代码是这样的,和视频里面 ...
- IdentityServer4与API单项目整合(net core 3.X)
一.创建一个空的api项目 添加identityserver4的nuget包 配置config文件 public static IEnumerable<IdentityResource> ...
- Sorted Adjacent Differences(CodeForces - 1339B)【思维+贪心】
B - Sorted Adjacent Differences(CodeForces - 1339B) 题目链接 算法 思维+贪心 时间复杂度O(nlogn) 1.这道题的题意主要就是让你对一个数组进 ...
- python中闭包详解
谈谈自己的理解:python中闭包,闭包的实质 闭包这个概念好难理解,身边朋友们好多都稀里糊涂的,稀里糊涂的林老冷希望写下这篇文章能够对稀里糊涂的伙伴们有一些帮助~ 请大家跟我理解一下,如果在一个 ...