TRAC-IK机器人运动学求解器
TRAC-IK和Orocos KDL类似,也是一种基于数值解的机器人运动学求解器,但是在算法层面上进行了很多改进(Specifically, KDL’s convergence algorithms are based on Newton’s method, which does not work well in the presence of joint limits — common for many robotic platforms. TRAC-IK concurrently runs two IK implementations. One is a simple extension to KDL’s Newton-based convergence algorithm that detects and mitigates local minima due to joint limits by random jumps. The second is an SQP (Sequential Quadratic Programming) nonlinear optimization approach which uses quasi-Newton methods that better handle joint limits. By default, the IK search returns immediately when either of these algorithms converges to an answer ),相比KDL求解效率(成功率和计算时间)高了很多。
下面在Ubuntu16.04中安装TRAC-IK(之前已经安装过ROS Kinetic):
sudo apt-get install ros-kinetic-trac-ik
按照ROS教程新建一个名为ik_test的Package,并创建urdf文件夹用于存放机器人URDF描述文件,创建launch文件夹存放launch文件:

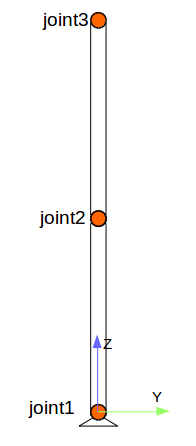
参考trac_ik_examples修改package.xml以及CMakeLists.txt文件,添加TRAC-IK以及KDL的支持。编写一个简单的robot.urdf文件,joint1为与基座link0相连的基关节,joint3为末端关节:
<robot name="test_robot">
<link name="link0" />
<link name="link1" />
<link name="link2" />
<link name="link3" /> <joint name="joint1" type="continuous">
<parent link="link0"/>
<child link="link1"/>
<origin xyz="0 0 0" rpy="0 0 0" />
<axis xyz="1 0 0" />
</joint> <joint name="joint2" type="continuous">
<parent link="link1"/>
<child link="link2"/>
<origin xyz="0 0 1" rpy="0 0 0" />
<axis xyz="1 0 0" />
</joint> <joint name="joint3" type="continuous">
<parent link="link2"/>
<child link="link3"/>
<origin xyz="0 0 1" rpy="0 0 0" />
<axis xyz="1 0 0" />
</joint> </robot>
TRAC-IK求解机器人逆运动学函数为CartToJnt:
int CartToJnt(const KDL::JntArray &q_init, const KDL::Frame &p_in, KDL::JntArray &q_out, const KDL::Twist& bounds=KDL::Twist::Zero());
第一个参数q_init为关节的初始值,p_in为输入的末端Frame,q_out为求解输出的关节值。基本用法如下:
#include <trac_ik/trac_ik.hpp> TRAC_IK::TRAC_IK ik_solver(KDL::Chain chain, KDL::JntArray lower_joint_limits, KDL::JntArray upper_joint_limits, double timeout_in_secs=0.005, double error=1e-, TRAC_IK::SolveType type=TRAC_IK::Speed); % OR TRAC_IK::TRAC_IK ik_solver(string base_link, string tip_link, string URDF_param="/robot_description", double timeout_in_secs=0.005, double error=1e-, TRAC_IK::SolveType type=TRAC_IK::Speed); % NOTE: The last arguments to the constructors are optional.
% The type can be one of the following:
% Speed: returns very quickly the first solution found
% Distance: runs for the full timeout_in_secs, then returns the solution that minimizes SSE from the seed
% Manip1: runs for full timeout, returns solution that maximizes sqrt(det(J*J^T))
% Manip2: runs for full timeout, returns solution that minimizes cond(J) = |J|*|J^-1| int rc = ik_solver.CartToJnt(KDL::JntArray joint_seed, KDL::Frame desired_end_effector_pose, KDL::JntArray& return_joints, KDL::Twist tolerances); % NOTE: CartToJnt succeeded if rc >=0 % NOTE: tolerances on the end effector pose are optional, and if not
% provided, then by default are 0. If given, the ABS() of the
% values will be used to set tolerances at -tol..0..+tol for each of
% the 6 Cartesian dimensions of the end effector pose.
下面是一个简单的测试程序,先通过KDL计算正解,然后使用TRAC-IK反算逆解:
#include "ros/ros.h"
#include <trac_ik/trac_ik.hpp> #include <kdl/chainiksolverpos_nr_jl.hpp>
#include <kdl/chain.hpp>
#include <kdl/chainfksolver.hpp>
#include <kdl/chainfksolverpos_recursive.hpp>
#include <kdl/frames_io.hpp> using namespace KDL; int main(int argc, char **argv)
{
ros::init(argc, argv, "ik_test");
ros::NodeHandle nh("~"); int num_samples;
std::string chain_start, chain_end, urdf_param;
double timeout;
const double error = 1e-; nh.param("chain_start", chain_start, std::string(""));
nh.param("chain_end", chain_end, std::string("")); if (chain_start=="" || chain_end=="") {
ROS_FATAL("Missing chain info in launch file");
exit (-);
} nh.param("timeout", timeout, 0.005);
nh.param("urdf_param", urdf_param, std::string("/robot_description")); if (num_samples < )
num_samples = ; TRAC_IK::TRAC_IK ik_solver(chain_start, chain_end, urdf_param, timeout, error, TRAC_IK::Speed); KDL::Chain chain;
bool valid = ik_solver.getKDLChain(chain); if (!valid) {
ROS_ERROR("There was no valid KDL chain found");
return -;
} // Set up KDL IK
KDL::ChainFkSolverPos_recursive fk_solver(chain); // Forward kin. solver based on kinematic chain // Create joint array
unsigned int nj = chain.getNrOfJoints();
ROS_INFO ("Using %d joints",nj);
KDL::JntArray jointpositions = JntArray(nj); // Assign some values to the joint positions
for(unsigned int i=;i<nj;i++){
float myinput;
printf ("Enter the position of joint %i: ",i);
scanf ("%e",&myinput);
jointpositions(i)=(double)myinput;
} // Create the frame that will contain the results
KDL::Frame cartpos; // Calculate forward position kinematics
bool kinematics_status;
kinematics_status = fk_solver.JntToCart(jointpositions,cartpos); Vector p = cartpos.p; // Origin of the Frame
Rotation M = cartpos.M; // Orientation of the Frame double roll, pitch, yaw;
M.GetRPY(roll,pitch,yaw); if(kinematics_status>=){
printf("%s \n","KDL FK Succes");
std::cout <<"Origin: " << p() << "," << p() << "," << p() << std::endl;
std::cout <<"RPY: " << roll << "," << pitch << "," << yaw << std::endl; }else{
printf("%s \n","Error: could not calculate forward kinematics :(");
} KDL::JntArray joint_seed(nj);
KDL::SetToZero(joint_seed);
KDL::JntArray result(joint_seed); int rc=ik_solver.CartToJnt(joint_seed,cartpos,result);
if(rc < )
printf("%s \n","Error: could not calculate forward kinematics :(");
else{
printf("%s \n","TRAC IK Succes");
for(unsigned int i = ; i < nj; i++)
std::cout << result(i) << " ";
} return ;
}
test.launch文件如下:
<?xml version="1.0"?>
<launch>
<arg name="chain_start" default="link0" />
<arg name="chain_end" default="link3" />
<arg name="timeout" default="0.005" /> <param name="robot_description" textfile="$(find ik_test)/urdf/robot.urdf" /> <node name="ik_test" pkg="ik_test" type="ik_test" output="screen">
<param name="chain_start" value="$(arg chain_start)"/>
<param name="chain_end" value="$(arg chain_end)"/>
<param name="timeout" value="$(arg timeout)"/>
<param name="urdf_param" value="/robot_description"/>
</node> </launch>
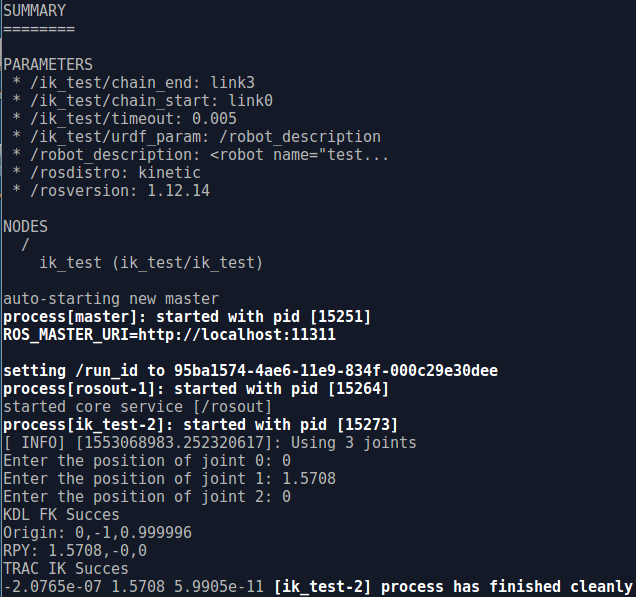
使用catkin_make编译成功,并设置环境后,运行该程序
roslaunch ik_test test.launch
通过键盘分别输入三个关节值:0,1.5708(90°),0 运动学正逆解计算结果如下图所示:
接下来使用7自由的的Franka panda机器人进行正逆解计算测试。
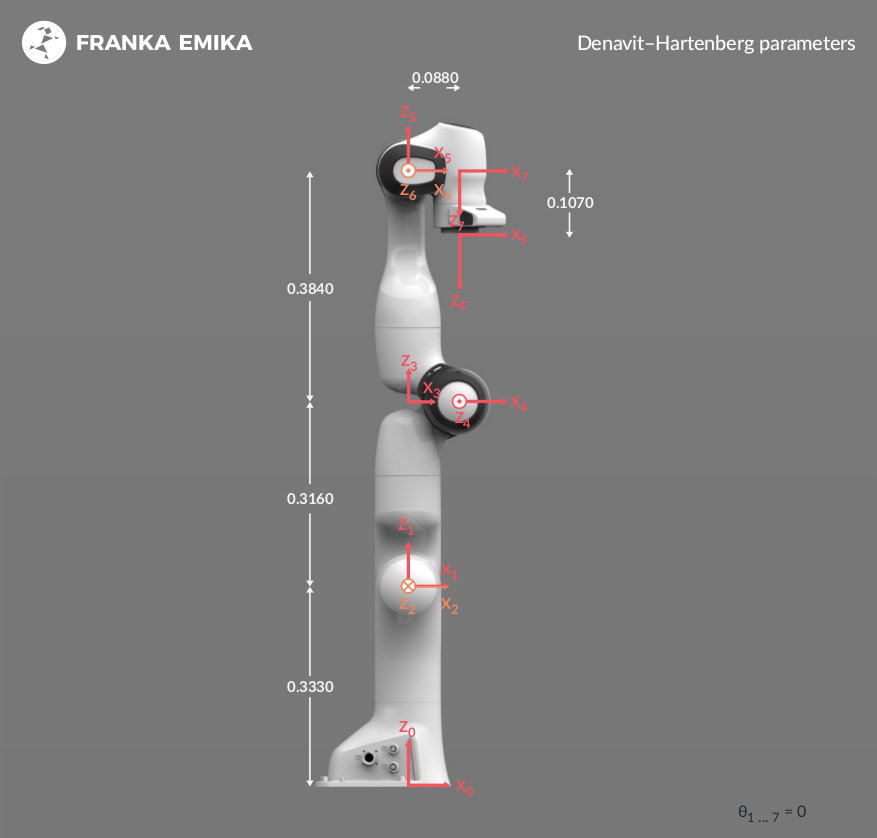
franka_description中包含Franka机器人的URDF文件,编写panda_test.launch,设置基关节为panda_link0,末端关节(法兰盘)为panda_link8。因此,正逆解计算都是以机器人法兰中心为基准。
<?xml version="1.0"?>
<launch>
<arg name="chain_start" default="panda_link0" />
<arg name="chain_end" default="panda_link8" />
<arg name="timeout" default="0.005" /> <param name="robot_description" command="$(find xacro)/xacro.py '$(find franka_description)/robots/panda_arm.urdf.xacro'" /> <node name="ik_test" pkg="ik_test" type="ik_test" output="screen">
<param name="chain_start" value="$(arg chain_start)"/>
<param name="chain_end" value="$(arg chain_end)"/>
<param name="timeout" value="$(arg timeout)"/>
<param name="urdf_param" value="/robot_description"/>
</node> </launch>
test.cpp中计算逆解前使用getKDLLimits函数得到机器人关节运动范围,并设定关节初始值在上下限的正中间。
#include "ros/ros.h"
#include <trac_ik/trac_ik.hpp> #include <kdl/chainiksolverpos_nr_jl.hpp>
#include <kdl/chain.hpp>
#include <kdl/chainfksolver.hpp>
#include <kdl/chainfksolverpos_recursive.hpp>
#include <kdl/frames_io.hpp> using namespace KDL; int main(int argc, char **argv)
{
ros::init(argc, argv, "ik_test");
ros::NodeHandle nh("~"); int num_samples;
std::string chain_start, chain_end, urdf_param;
double timeout;
const double error = 1e-; nh.param("chain_start", chain_start, std::string(""));
nh.param("chain_end", chain_end, std::string("")); if (chain_start=="" || chain_end=="") {
ROS_FATAL("Missing chain info in launch file");
exit (-);
} nh.param("timeout", timeout, 0.005);
nh.param("urdf_param", urdf_param, std::string("/robot_description")); if (num_samples < )
num_samples = ; TRAC_IK::TRAC_IK ik_solver(chain_start, chain_end, urdf_param, timeout, error, TRAC_IK::Distance); KDL::Chain chain;
bool valid = ik_solver.getKDLChain(chain); if (!valid) {
ROS_ERROR("There was no valid KDL chain found");
return -;
} KDL::JntArray ll, ul; //lower joint limits, upper joint limits
valid = ik_solver.getKDLLimits(ll,ul); if (!valid)
ROS_INFO("There were no valid KDL joint limits found"); // Set up KDL IK
KDL::ChainFkSolverPos_recursive fk_solver(chain); // Forward kin. solver based on kinematic chain // Create joint array
unsigned int nj = chain.getNrOfJoints();
ROS_INFO ("Using %d joints",nj);
KDL::JntArray jointpositions = JntArray(nj); // Assign some values to the joint positions
for(unsigned int i=;i<nj;i++){
float myinput;
printf ("Enter the position of joint %i: ",i);
scanf ("%e",&myinput);
jointpositions(i)=(double)myinput;
} // Create the frame that will contain the results
KDL::Frame cartpos; // Calculate forward position kinematics
bool kinematics_status;
kinematics_status = fk_solver.JntToCart(jointpositions,cartpos); Vector p = cartpos.p; // Origin of the Frame
Rotation M = cartpos.M; // Orientation of the Frame double roll, pitch, yaw;
M.GetRPY(roll,pitch,yaw); if(kinematics_status>=){
printf("%s \n","KDL FK Succes");
std::cout <<"Origin: " << p() << "," << p() << "," << p() << std::endl;
std::cout <<"RPY: " << roll << "," << pitch << "," << yaw << std::endl; }else{
printf("%s \n","Error: could not calculate forward kinematics :(");
} KDL::JntArray joint_seed(nj);
//KDL::SetToZero(joint_seed); for (uint j=; j<joint_seed.data.size(); j++)
joint_seed(j) = (ll(j)+ul(j))/2.0; KDL::JntArray result(joint_seed); int rc=ik_solver.CartToJnt(joint_seed,cartpos,result);
if(rc < )
printf("%s \n","Error: could not calculate inverse kinematics :(");
else{
printf("%s \n","TRAC IK Succes");
for(unsigned int i = ; i < nj; i++)
std::cout << result(i) << " ";
} return ;
}
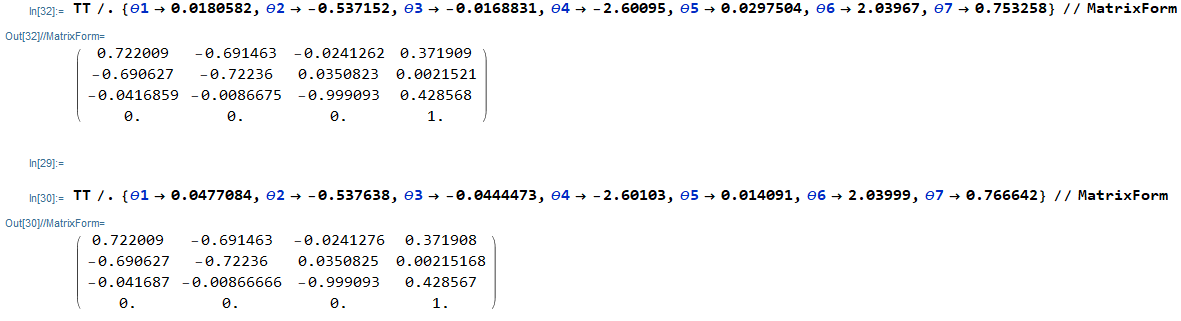
为了验证TRAC-IK计算结果,使用libfranka中的echo_robot_state先输出机器人当前状态。O_T_EE是末端执行器(这里没有安装末端执行器,因此就是以法兰中心为基准)在机器人基坐标系中的位置姿态矩阵(按列优先存储),q为关节角度。
"O_T_EE": [0.722009,-0.690627,-0.0416898,0,-0.691463,-0.72236,-0.00866381,0,-0.0241316,0.0350823,-0.999093,0,0.371908,0.00215211,0.428567,1],
"O_T_EE_d": [0.722007,-0.690631,-0.041642,0,-0.691467,-0.722355,-0.00871983,0,-0.0240581,0.0350898,-0.999095,0,0.371922,0.00215033,0.428596,1],
"F_T_EE": [1,0,0,0,0,1,0,0,0,0,1,0,0,0,0,1],
"EE_T_K": [1,0,0,0,0,1,0,0,0,0,1,0,0,0,0,1],
"elbow": [-0.0168831,-1],
"elbow_d": [-0.0168889,-1],
"q": [0.0180582,-0.537152,-0.0168831,-2.60095,0.0297504,2.03967,0.753258],
"dq": [-0.00051007,-0.000212418,0.00125443,0.000394549,-2.9871e-05,0.000278746,0.000261954],
...
开启测试程序,输入上面的关节值,输出如下:

KDL正解计算的值与O_T_EE一致。根据Franka机器人的DH参数表,可以写出从法兰到基座的变换矩阵:
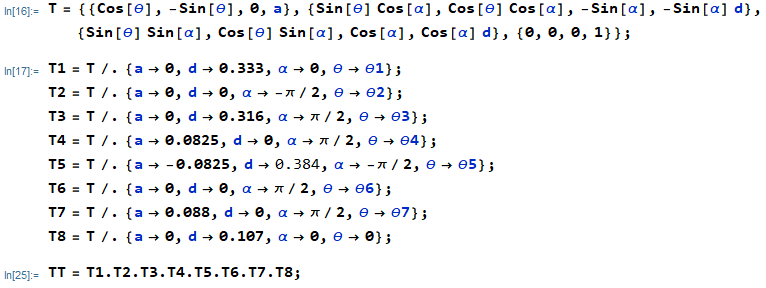
将正解输入与逆解输出的关节值分别代入变换矩阵中,可以发现理论计算与O_T_EE和KDL正解结果一致。
由于7自由度机械臂有无数组逆解,因此一般要根据某种优化原则,选取其中一组。对于Franka机械臂,可使用TRAC-IK得到逆解后进行关节空间中的轨迹规划,实现类似于“movej”的功能。
参考:
API reference of the Kinematics and Dynamics Library
orocos_kdl学习(二):KDL Tree与机器人运动学
TRAC-IK机器人运动学求解器的更多相关文章
- C#简易一元二次求解器
using System;using System.Collections.Generic;using System.ComponentModel;using System.Data;using Sy ...
- 编程之美之数独求解器的C++实现方法
编程之美的第一章的第15节.讲的是构造数独.一開始拿到这个问题的确没有思路, 只是看了书中的介绍之后, 发现原来这个的求解思路和N皇后问题是一致的. 可是不知道为啥,反正一開始确实没有想到这个回溯法. ...
- Maxwell顺态求解器电磁力分析
文源:技术邻 问题描述:求解一段通有正弦交流电的直导线在某一稳态磁场中的受力情况,并简单验证仿真结果. 模型介绍: 如上几何模型中10mm边长立方体代表永磁体,材料属性为材料库中的NdFe35,修改磁 ...
- 线性二次型调节器LQR/LQC算法解析及求解器代码(matlab)
参考链接:http://120.52.51.14/stanford.edu/class/ee363/lectures/dlqr.pdf 本文参考讲义中的第20页PPT,根据Hamilton-Jacob ...
- 经典数独游戏+数独求解器—纯C语言实现
"心常乐数独小游戏"(下面简称"本软件")是一款windows平台下的数独游戏软件. 本软件是开源.免费软件. 本软件使用纯C语言编写,MinGW编译,NSIS ...
- SCIP | 数学规划求解器SCIP超详细的使用教程
前言 小伙伴们大家好呀!继上次lp_solve规划求解器的推文出来以后,大家都期待着更多求解器的具体介绍和用法.小编哪敢偷懒,这不,赶在考试周之际,又在忙里偷闲中给大家送上一篇SCIP规划求解的推文教 ...
- 数学规划求解器lp_solve超详细教程
前言 最近小编学了运筹学中的单纯形法.于是,很快便按奈不住跳动的心.这不得不让我拿起纸和笔思考着,一个至关重要的问题:如何用单纯形法装一个完备的13? 恰巧,在我坐在图书馆陷入沉思的时候,一位漂亮的小 ...
- QuantLib 金融计算——数学工具之求解器
目录 QuantLib 金融计算--数学工具之求解器 概述 调用方式 非 Newton 算法(不需要导数) Newton 算法(需要导数) 如果未做特别说明,文中的程序都是 Python3 代码. Q ...
- win10安装z3求解器
因为课程要求,我不得不接触求解器,之前有在ubuntu上装过一个叫stp的求解器,没怎么用: 今天在我的电脑(win10)上上装了一款更方便的求解器---z3,下面先详细介绍一下怎么安装和配置: 1. ...
随机推荐
- vue文字跑马灯效果
https://cdn.bootcss.com/jQuery.Marquee/1.5.0/jquery.marquee.js 兼容vue $("#demo4").marquee({ ...
- Mysql 查询实现成绩排名
Mysql 查询实现成绩排名,相同分数名次相同,类似于rank()函数 近日系统要实现总分成绩排名,而且相同分数的学生排名要一样,在网上搜了一圈,没有找到合适的方法,只能靠自己实现了,这里提供两种方法 ...
- Lock为线程上锁,防止数据混乱
用法: 先实例化 lock = threading.Lock() 1. lock.acquire() 上锁 需上锁代码 lock.release() 解锁 2. with lock: 上下两种方式都 ...
- hdu1202解题报告
#include<stdio.h>int main(){ int n,i; double sum,s,p,sum1; while(scanf("%d" ...
- HDU 3488 Tour (最大权完美匹配)【KM算法】
<题目链接> 题目大意:给出n个点m条单向边边以及经过每条边的费用,让你求出走过一个哈密顿环(除起点外,每个点只能走一次)的最小费用.题目保证至少存在一个环满足条件. 解题分析: 因为要求 ...
- HDU 4612 Warm up (边双连通分量+缩点+树的直径)
<题目链接> 题目大意:给出一个连通图,问你在这个连通图上加一条边,使该连通图的桥的数量最小,输出最少的桥的数量. 解题分析: 首先,通过Tarjan缩点,将该图缩成一颗树,树上的每个节点 ...
- uni-app — 一套前端开发跨平台应用的终极解决方案
uni-app 是一个使用 Vue.js 开发跨平台应用的前端框架,开发者编写一套代码,可编译到iOS.Android.H5.小程序等多个平台. 今天有空就来介绍一下uni-app这个能够跨平台开发, ...
- elasticsearch数据备份还原
elasticsearch数据备份还原 1.在浏览器中运行http://XXX.XXX.XXX.XXX:9200/_flush,确保索引数据能保存到硬盘中. 2.原数据的备份.主要是elasticse ...
- 如何调用wasm文件?
如果用C/C++导出wasm模块,方法名会默认带_前缀:如果是asm.js转成了wasm模块,方法名就不带_前缀. 一.c到js 二.wasm和js 三.小尝试 这里主要汇集了自己初学webAssem ...
- Django视图层、虚拟环境
一.虚拟环境安装 目的:为了解决版本共存问题 ''' 1.通过pip3安装虚拟环境: -- pip3 install virtualenv 2.前往目标文件夹: -- cd 目标文件夹 (C:\Vir ...